научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 02, февраль 2012
УДК. 62-522.2
МГТУ им. Н.Э. Баумана
Введение
Как известно, требуемый уровень демпфирования многоопорной колебательной системы зависит от характера внешнего возмущения. При силовом типе возмущения (разгон, торможение и др.) необходим максимальный уровень демпфирования во всем частотном диапазоне, при кинематическом же рациональный уровень демпфирования зависит от амплитуд и длин неровностей, а также от частоты возмущения. Первый тип возмущения легко прогнозируется по определенным последовательностям действий водителя с органами управления при соответствующих режимах движения машины. Второй связан с оценкой геометрических параметров профиля и достаточно точной оценкой скорости движения машины, что в настоящее время вызывает проблемы, связанные с практической реализацией. В связи с этим регулирование характеристики демпфирования в зависимости от режимов работы систем амортизации является одним из основных направлений дальнейшего их совершенствования. Весьма перспективно это направление для повышения качества систем первичного подрессоривания многоосных колесных машин (МКМ) с количеством осей более трех [1, 2].
Вопросам создания управляемых систем подрессоривания транспортных машин на основе релейного принципа управления демпфированием посвящены работы [3, 4, 5 идр.]. В них достаточно подробно исследованы вопросы влияния характеристик демпфирования на плавность хода колесных и гусеничных машин. Анализ существующих научных работ показывает, что выбор оптимального демпфирования подвески на основе измерений профиля неровностей дороги сталкивается с существенными вычислительными трудностями при оценке статистических характеристик дорожных неровностей в процессе управления. В работе [6] показано, что создание управляемой подвески на основе релейного закона управления двухуровневым демпфированием позволяет добиваться повышения плавности хода многоосных колесных машин, используя в качестве входных параметров только те фазовые переменные, которые характеризуют колебания корпуса МКМ: скорости продольно-угловых, поперечно-угловых и вертикальных колебаний подрессоренной массы, а также величины прогибов подвески.
Целью данной работы является разработка методов расчета характеристик управляемой системы подрессоривания с двухуровневым демпфированием, обеспечивающих возможность реализации закона управления, предложенного в [6]. Для этого необходимо разработать методику проектного расчета упругой и двухуровневой демпфирующей характеристик пневмогидравлических устройств подвески машины.
Объектом моделирования в данной работе является многоосная колесная машина полной массой 60 т с колесной формулой 8х8, оснащенная пневмогидравлической подвеской.
1. Расчет упругой характеристики подвески
Расчет упругой характеристики подвески – один из основополагающих шагов, так как позволяет проанализировать, насколько удачна выбранная кинематика системы подрессоривания, достаточна ли величина потенциальной энергии подвески при выбранных параметрах, и необходимо ли производить расчет заново при неудовлетворительных показателях.
При расчете упругой характеристики подвески воспользуемся рекомендациями работы [7]. Зависимость упругой силы Pz от хода hz определим по формуле
 ,
,
где Pz0 – статическая нагрузка на колесо; hz0=0,2 м – статический прогиб подвески.
Упругая характеристика подвески, приведенная к ходу колеса и рассчитанная по приведенной выше формуле, представлена на рис. 1.
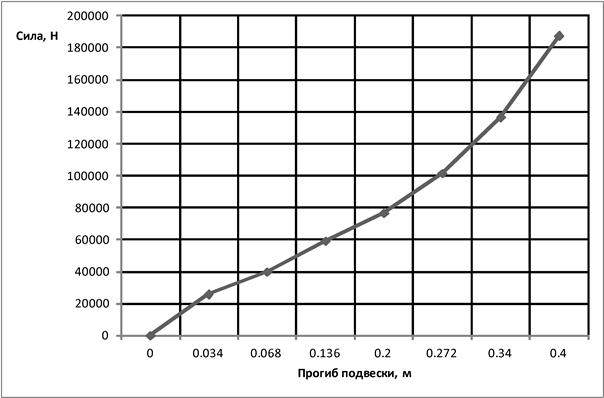
Рис. 1. Зависимость упругой силы подвески от хода
2. Определение основных характеристик двухуровнего демпфирования
Сопротивление демпферов (амортизаторов) выбирают так, чтобы обеспечить гашение колебаний корпуса с требуемой эффективностью [1, 2]: относительный коэффициент затухания в зоне резонанса должен быть равен ψ=0,4…0,6 для вертикальных и продольно-угловых колебаний. Если в системе подрессоривания используются управляемые амортизаторы (управление демпфированием по принципу включен - выключен), тогда характеристики прямого хода амортизаторов имеют два уровня: высокий и низкий. Для низкого уровня демпфирования принимают ψ=0,1…0,3. Характеристики обратного хода для разных уровней демпфирования обычно одинаковая.
Демпфирующие свойства амортизатора определяются коэффициентом сопротивления μ, то есть демпфирующая сила на колесе в зависимости от скорости колеса определяется по формуле Rд.к = μVк.
Коэффициенты сопротивления на прямом и обратном ходу различны (рис. 2), но на первом этапе расчетов используют среднее значение коэффициента сопротивления
μср = (μпр + μоб)/2.
Рис. 2. Демпфирующая характеристика подвески:1 – прямой ход; 2 – обратный ход
Средний коэффициент сопротивления амортизатора, приведенный к колесу, определим формулами [3]

где ![]() - средние коэффициенты демпфирования для вертикальных и продольно-угловых колебаний;
- средние коэффициенты демпфирования для вертикальных и продольно-угловых колебаний; ![]() - относительные коэффициенты затухания для вертикальных и продольно-угловых колебаний;
- относительные коэффициенты затухания для вертикальных и продольно-угловых колебаний; ![]() - собственные частоты вертикальных и продольно-угловых колебаний; li — продольная координата i-й подвески относительно центра масс корпуса.
- собственные частоты вертикальных и продольно-угловых колебаний; li — продольная координата i-й подвески относительно центра масс корпуса.
Из двух полученных значений ![]() выбираем наибольшее. По опыту конструирования [3] коэффициент сопротивления амортизатора на обратном ходе, исходя из условия «не зависания» колеса, можно определить формулой
выбираем наибольшее. По опыту конструирования [3] коэффициент сопротивления амортизатора на обратном ходе, исходя из условия «не зависания» колеса, можно определить формулой
 .
.
Максимальная сила сопротивления амортизатора на прямом ходе, приведенная к оси колеса, ограничивается ускорениями тряски:
 .
.
Здесь ![]() – максимальные допустимые ускорения тряски; hн = 0,05 м — высота неровностей; с – жесткость подвески вблизи статического хода.
– максимальные допустимые ускорения тряски; hн = 0,05 м — высота неровностей; с – жесткость подвески вблизи статического хода.
Полученная таким образом характеристика нуждается в уточнении, так как используемые формулы не учитывают нелинейности подвески, характерные для современных быстроходных МКМ. Уточнить демпфирующую характеристику можно, используя имитационное математическое моделирование движения МКМ на ЭВМ. При моделировании была использована математическая модель, разработанная на кафедре «Колесные машины» МГТУ им. Н.Э. Баумана [7]. Особенностью математической модели движения МКМ по неровностям является то, что скорость машины задается не принудительно, а формируется силами взаимодействия вращающихся колесных движителей с опорным основанием. Это позволяет получить высокую точность при моделировании реальных процессов движения МКМ.
Известно, что демпфирующий элемент системы подрессоривания, с одной стороны, должен гасить колебания корпуса машины при максимальных амплитудах раскачки («резонансный» режим движения по периодической трассе), а, с другой стороны, не должен передавать дополнительных усилий, вызывающих ускорения «тряски», на корпус машины при движении по высокочастотному профилю трассы («зарезонансный» режим) [8]. Поэтому характеристику демпфирующего элемента уточняют, используя два критерия плавности хода:
Критерий 1. Пиковые ускорения на месте водителя близко, но не превышают 3,5 g.
Критерий 2. Средние квадратические отклонения ускорения на месте водителя не превышают норм по снижению производительности труда от усталости [9].
На характеристике демпфирующего элемента можно выделить три участка (рис. 2):
1 – наклонный участок «обратный ход»,
2 – наклонный участок «прямой ход»,
3 – горизонтальная полка, ограничивающая сопротивление амортизатора на прямом ходе.
Характеристики амортизаторов выбираются из следующих соображений. Коэффициент сопротивления амортизатора на обратном ходе (участок 1) для обоих уровней демпфирования должен быть максимальным, чтобы эффективно гасить колебания корпуса. Но он ограничивается эффектом «зависания» колес. Из-за большего сопротивления амортизатора, колесо не успевает вернуться на уровень нулевого хода подвески до наезда на следующую неровность. В результате чего сокращается динамический ход подвески и вероятность «пробоя» возрастает. Кроме того, отрыв колес от грунта приводит к потере управляемости колесной машины.
Коэффициент сопротивления амортизатора на прямом ходе (участок 3) для высокого уровня демпфирования также должен быть максимальным. Он ограничивается критерием 1, то есть амортизатор не должен передавать на корпус усилия, вызывающие ускорения более 3,5 g.
Участок 3, для амортизатора низкого уровня является ограничением по ускорениям «тряски» - критерий 2.
Наклонный участок прямого хода (участок 2) соединяет нулевую точку с участком 3. Наклон данного участка можно сделать таким же, как наклон участка обратного хода (участок 1) или выбрать точку открытия предохранительного клапана в районе 0,5 м/с.
Учитывая вышесказанное, алгоритм выбора характеристики демпфирующего элемента с использованием имитационного математического моделирования движения машины на ЭВМ выглядит следующим образом.
1. Для исходной характеристики демпфирующего элемента, определяем высоту проходной периодической неровности hmin по критерию 1 в «резонансном» режиме движения по неровностям длинной в две базы машины, (как наиболее сложный вариант с точки зрения вероятности пробоя подвески [10]). Для этого моделируется движение машины по периодическому профилю со скоростью, соответствующей резонансу режиму по продольно-угловым колебаниям, v = a / Tj, где a = 2L, L – база машины. При этом фиксируются ускорения на месте водителя, ход первой подвески и сила в крайней точке переднего свеса корпуса МКМ, так как, кроме пробоя подвески, достижение критических ускорений на месте водителя может происходить вследствие ударов корпусом машины о грунт.
2. Уточняем наклон характеристики обратного хода, одинакового для обоих уровней демпфирования, по условию «не зависания» первого колеса. Моделируем «резонансный» режим движения. Анализируя записи хода fпервого колеса (рис 3), добиваемся, чтобы колесо возвращался на нижний ограничитель хода в момент контакта с грунтом. При этом постоянно повышаем высоту неровностей, чтобы выдерживался критерий 1. Фиксируем достигнутую высоту проходной периодической неровности hmin.
3. Уточняем положение горизонтального участка, ограничивающего сопротивление амортизатора на прямом ходе для высокого уровня демпфирования по критерию 1. Моделируем «резонансный» режим движения. Анализируя записи хода первого колеса и ускорения на месте водителя, добиваемся, чтобы критерий 1 достигался при полном ходе подвески.
Рис. 3. Фрагмент записи хода первого колеса:
1 – область верхнего ограничителя хода; 2 – область нижнего ограничителя хода; 3 – колесо не зависает; 4 – колесо на грани зависания; 5 – колесо зависает
4. Уточняем положение горизонтального участка, ограничивающего сопротивление амортизатора на прямом ходе для низкого уровня демпфирования по критерию 2. Моделируем «зарезонансный» режим движения по неровностям, вызывающим «тряску» [7], длинной равной диаметру колеса, а = 1...2 м, высотой h = 0,05...0,1 м с максимальной скоростью около 70 км/ч. Изменяя положение участка 3, добиваемся того, чтобы выполнялся критерий 2.
5. Для уточненной характеристики амортизатора определяем высоту проходной периодической неровности в «резонансном» режиме движения.
По результатам моделирования согласно п.п. 1 … 5, подобрана характеристика двухуровнего демпфирования, приведенная к ходу колеса (рис. 4).
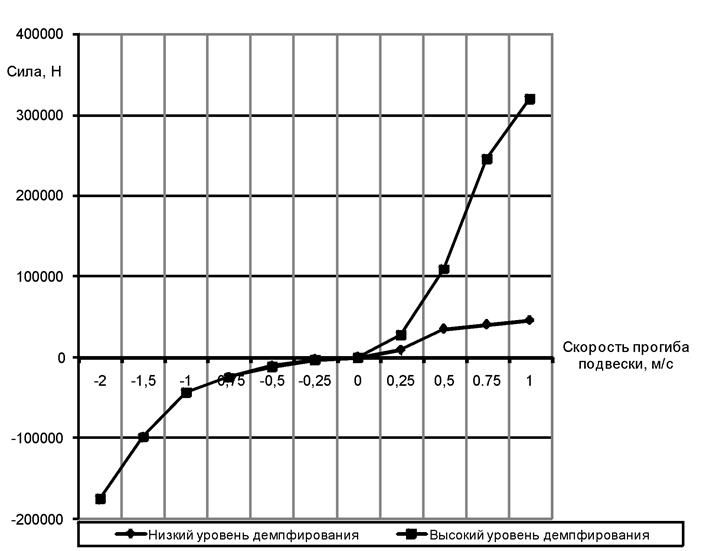
Рис. 4. Характеристика двухуровнего демпфирования
Заключение
Разработана методика проектного расчета характеристик двухуровневого демпфирования управляемой подвески МКМ. Обоснован выбор уровней демпфирования отдельно для хода сжатия и хода отбоя подвески. Показано, что характеристика двухуровневого демпфирования строится только для хода сжатия подвески, на ходе отбоя нужно выбирать только один уровень демпфирования из условия отсутствия «зависания» колес.
Разработанная методика может быть использована при разработке релейных систем управления подвеской МКМ.
Список литературы
1. Дербаремдикер А.Д. Амортизаторы транспортных машин. – М.: Машиностроение, 1985. – 200 с.
2. Самонастраивающийся амортизатор с программированной демпфирующей характеристикой / А.Д. Дербаремдикер, Р.А. Мусарский, И.О. Степанов, М.А. Юдкевич // Автомобильная промышленность. 1985. – № 1. – С. 13 – 15.
3. Расчет основных параметров подвески переменной структуры мно-гоосных автомобилей / А.Н. Густомясов [и др.] // Изв. вузов. Машиностроение . – 1983. – №2. – С. 36 – 41.
4. Сухоруков А.В. Управление демпфирующими элементами в системе подрессоривания быстроходной гусеничной машины: Дисс. ... канд. техн. наук. Специальность 05.05.03 - Автомобили и тракторы.- М., 2003.- 204 с.
5. Жеглов Л.Ф. Автоматические системы подрессоривания: Учебное пособие. – М.: МГТУ им. Н.Э. Баумана, 2001. – 48 с.
6. Жилейкин М.М. Разработка адаптивного алгоритма релейного управления двухуровневым демпфированием подвески многоосных колесных машин [Электронный ресурс] // Электрон. журн. «Наука и образование: электронное научно-техническое издание». 2011. Выпуск 12, № 77-30569/347444 – Режим доступа: http://technomag.edu.ru/doc/347444.html, свободный.
7. Проектирование полноприводных колесных машин: Учебник для вузов: В 3 т. Т.3/Б.А. Афанасьев, Б.Н. Белоусов, Л.Ф. Жеглов и др.; Под ред. А.А. Полунгяна. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2008. – 432 с.
8. Белоусов Б.Н., Попов С.Д. Колесные транспортные средства особо большой грузоподъемности. Конструкция. Теория. Расчет. / Под общ. ред. Б.Н. Белоусова. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2006. – 728 с.
9. ГОСТ 12.2.012-2005. Вибрационная безопасность. Общие требования.- М.: Стандартинформ, 2008. – 35 с.
10. Дмитриев А.А., Чобиток В.А., Савочкин В.А. Автоматическое регулирование демпфирования в подвеске танка. Отчет. - М.: ВАБТВ, 1965, - 101 с.
Публикации с ключевыми словами: упругая характеристика подвески, демпфирующая характеристика подвески, двухуровневое демпфирование, управление подвеской многоосных колесных машин
Публикации со словами: упругая характеристика подвески, демпфирующая характеристика подвески, двухуровневое демпфирование, управление подвеской многоосных колесных машин
Смотри также:
- 77-30569/346660 Методика расчета характеристик пневмогидравлической управляемой подвески с двухуровневым демпфированием многоосных колесных машин
- Разработка адаптивного закона релейного управления трехуровневым демпфированием упруго-демпфирующих элементов подвески многоосных колесных машин
- 77-30569/346642 Экспериментальное исследование нагрузочных характеристик двухкамерной пневмогидравлической рессоры подвески автомобильных платформ нового поколения средней и большой грузоподъёмности
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||