научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 01, январь 2012
УДК. 62-522.2
МГТУ им. Н.Э. Баумана
Введение
Одним из важнейших эксплуатационных показателей многоосных колесных машин (МКМ) является подвижность, т.е. способность двигаться по дорогам с заданными статистическими характеристиками неровностей с установленными скоростями и преодолевать единичные препятствия (эскарп, ров и др.). Системы подрессоривания МКМ во многом сдерживают рост эксплуатационных скоростей движения, что объясняется, в первую очередь, тем, что широкий спектр режимов эксплуатации машин предъявляет весьма противоречивые требования к конструкции подвесок: повышение устойчивости, управляемости, плавности хода в транспортных режимах при кинематическом воздействии со стороны неровностей дороги; снижение динамических нагрузок на несущую систему в случае преодоления крупных единичных препятствий; динамическая стабилизация корпуса при силовых воздействиях на корпус МКМ (при разгоне-торможении, повороте, действии боковой импульсной нагрузки). Поскольку создание универсальной системы подрессоривания, имеющей оптимальные параметры для всех режимов эксплуатации, невозможно, решение проблемы заключается в создании управляемой системы подрессоривания, которая обеспечивает изменение сил, действующих на корпус машины, в достаточно широком частотном диапазоне, как функцию условий и режимов движения.
Одним из наиболее перспективных направлений разработки управляемой подвески является создание так называемых динамических систем управления [1]. Под динамическим регулированием (регулирование по мгновенному значению параметра) понимается управление колебаниями подрессоренной массы посредством переменного во времени дополнительного силового воздействия на корпус автомобиля со стороны подвески. Конкретное значение компенсирующего силового воздействия в каждый момент времени определяется алгоритмом, по которому осуществляется гашение колебаний. Это силовое воздействие может создаваться либо специальными активными элементами в подвеске, работающими от внешнего источника энергии, либо изменением параметров пассивных элементов подвески. Системы с динамическим регулированием и подводом энергии извне известны как активные подвески, а с регулированием текущих значений параметров пассивных элементов - как полуактивные.
Все активные подвески обладают большим недостатком, заключающемся в высоком энергопотреблении. Частично энергозатраты на работу активной подвески компенсируются снижением потерь энергии в пассивных демпферах, однако требуется достаточно мощная энергоустановка для питания активных элементов подвески и высокорасходные исполнительные устройства [2, 3]. От этого недостатка свободны полуактивные подвески, также относящиеся к системам динамического регулирования. Энергия в этом случае расходуется только на управление исполнительными устройствами, в качестве которых могут выступать регулируемые дроссели, регулируемые напорные, обратные, запорные клапаны. Усилие же, требуемое для осуществления гашения колебаний, создается в пассивных элементах подвески (упругих иди демпфирующих). Полуактивные подвески (в том числе и сам термин) были впервые предложены зарубежными учеными Кэрнопом Д. и Кросби М. [4]. Исследования этих подвесок проводились также и другими учеными [5, 6, 7].
Проведенные исследования показывают, что, применяя в качестве исполнительных устройств регулируемые напорные клапаны в гидравлических амортизаторах или пневмогидравлических рессорах, по способу, предложенному в работе [8], можно получать в подвеске любую требуемую для управления силу. При этом без потери эффективности можно значительно упростить систему управления, используя вместо регулируемых напорных клапанов более простые исполнительные устройства, вплоть до перехода к управлению двухуровневым демпфированием по релейному принципу.
Целью данной работы является разработка методов расчета характеристик управляемой системы подрессоривания с двухуровневым демпфированием, обеспечивающих возможность практической реализации законов управления, предложенных в [8]. Для этого необходимо решить следующие практические вопросы:
· определение величин «высокого» и «низкого» уровней демпфирования;
· разработка математических моделей управляемых пневмогидравлических устройств (ПГУ) подвески;
· разработка методики расчета конструктивных параметров управляемых ПГУ подвески с двухуровневым демпфированием.
Рассмотрим решение перечисленных задач на примере пневмогидравлической рессоры с противодалением. Объектом моделирования в данной работе является многоосная колесная машина полной массой 60 т с колесной формулой 8х8, оснащенная пневмогидравлической подвеской.
1. Выбор уровней демпфирования подвески
В работе [9] показано, что для многоосных автомобилей, в силу узкополосного низкочастотного спектра колебаний подрессоренной массы желательной является характеристика демпфирования, обеспечивающая автоматическое получение в зоне резонанса значения коэффициента затухания около ψ=0,4…0,6 по продольно-угловым и вертикальным колебаниям, независимо от массы объекта и изменения восстанавливающей силы. В то же время в зарезонансной зоне уровень демпфирования надо снижать [10], что приводит к существенному снижению вибронагруженности МКМ. Это приводит к необходимости создания подвески переменной структуры, в которой происходит автоматическое изменение уровня демпфирования в зависимости от вида воздействия на МКМ со стороны дорожных неровностей. Причем достаточно двух уровней: основного (высокого), обеспечивающего ψ=0,4…0,6, и низкого (ψ=0,1…0,3), который включается только в случае высокочастотного воздействия со стороны дорожного профиля.
С помощью известных методов проектного расчета [11] нами были получены упругая (рис. 1) и двухуровневая демпфирующая (рис. 2) характеристики подвески.

Рис. 1. Зависимость упругой силы подвески от прогиба
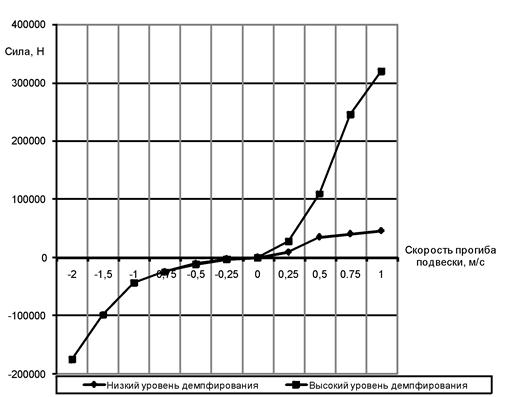
Рис. 2. Зависимость демпфирующей силы подвески от скорости прогиба:
ψ=0,4 – высокий уровень демпфирования;
ψ=0,15 – низкий уровень демпфирования
2. Математическая модель пневмогидравлической рессоры с противодавлением
2.1. Общие положения
При построении математической модели будем использовать следующие допущения: отсутствуют утечки рабочей жидкости (РЖ); волновые процессы в трубопроводах отсутствуют; температура РЖ постоянна (т.е. постоянными считаем коэффициенты кинематической вязкости и силы трения); потери на трение в магистралях и обратном клапане, золотнике и другой аппаратуре не учитываются; давление в сливной магистрали равно нулю; радиальный зазор между втулкой и золотником в золотниковых распределителях принимаем равным нулю; рабочие кромки считаем острыми; принимаем, что соединительные каналы велики по сечению и коротки по длине; постоянным принимаем модуль упругости РЖ
Уравнение неразрывности выражает закон сохранения массы движущейся жидкости. Для двух поперечных сечений одного и того же потока идеальной жидкости (рис. 3) уравнение неразрывности можно записать в виде
Q1 = Q2, (1)
где Q1, Q2 – расходы жидкости через сечения 1 и 2.
Рис. 3. Схема сечений потока рабочей жидкости
Уравнение (1) показывает, что в любом сечении потока при установившемся движении несжимаемой РЖ расход ее постоянен.
Расход жидкости через дроссель связан с перепадом давления на входе и выходе известной зависимостью [12, 13]
 (2)
(2)
где µ - коэффициент расхода; fдр – площадь проходного сечения дросселя; (р1-р2) - перепад давлений; ρ – плотность рабочей жидкости.
Коэффициент расхода µ золотникового дросселя зависит от числа Рейнольдса и условий подхода потока к рабочему окну. Для идеального золотникового дросселя можно принять µ = 0,73 … 0,75 [14].
Уравнение движения подвижных элементов составляют на основании основного закона динамики - второго закона Ньютона
 (3)
(3)
где m - приведенная к поршню масса подвижных частей и РЖ; p1, p2, - давление в полостях гидроцилиндра; S1, S2, - эффективные площади поршня в поршневой и штоковой полостях ГЦ; Fk – внешняя нагрузка; Fmp - сила трения; Fуп – сила, действующая со стороны цилиндра на поршень при достижении им упоров; x- перемещение поршня.
При вычислении силы трения Fmp следует отметить, что ее величина, в общем случае, зависит от большого количества факторов, таких как вид трения, рабочее давление, температура, шероховатость поверхностей, геометрических и физико-механических характеристик уплотнений и др. [15, 16]. Ввиду значительных давлений в зоне контакта уплотнений поршней и штоков пневмогидравлических устройств, обусловленных большим предварительным натягом, их трение можно считать сухим или гранично-сухим [16].
В математических моделях элементов ПГУ зависимость силы сухого трения от скорости относительного перемещения контактирующих поверхностей задается в виде, показанном на рис. 4.
Сила Fmp приближенно описывается следующим равенством [17]
![]() (4)
(4)
где Fc – кулоновское трение; kb – коэффициент изменения силы страгивания;
cv – коэффициент перевода.
Кулоновское трение определяется зависимостью
![]() (5)
(5)
где Fpr – сила трения покоя; fcfr – коэффициент силы кулоновского трения;
pA, pB – давление в полостях гидроцилиндра ГПР.
Для того чтобы избежать разрыва при dx/dt=0, вводится небольшая область abs[dx/dt] ≤ vthв окрестности нулевого значения скорости, где сила трения прямо пропорциональна скорости:
![]() (6)
(6)
 (7)
(7)
Здесь vth - скорость на границе введенной области.
Численные значения параметры в формулах (4) – (7), принятые при моделировании, приведены в таблице 1.
Таблица 1
Численные значения параметров, принятых при моделировании
Параметр | Обозначение | Размерность | Значение |
Сила трения покоя | Fpr | Н | 1 500 |
Коэффициент силы | fcfr | Н/бар | 33 |
Коэффициент изменения | kb | -- | 1,1 |
Коэффициент перевода | cv | с/м | 10 |
Начальное давление газа в поршневой полости ГПР | pA | кПа | 13,5×103 |
Начальное давление газа в штоковой полости ГПР | pB | кПа | 45×102 |
Вид зависимости силы, действующей на поршень со стороны упоров в цилиндре, представлен на рис. 5.
|
|
Рис. 4. Характеристика сухого трения | Рис. 5. Зависимость силы Fу от положения поршня |
Таким образом, формула для расчета Fуп имеет вид
 (8)
(8)
где Хуп1, Хуп2 – координаты упоров в цилиндре; Су – жесткость упора.
Для полости цилиндра связь между давлением и балансом расходов имеет вид [9]
 (9)
(9)
где р – давление в полости цилиндра; Q1 и Q2 – расходы рабочей жидкости на входе и выходе рассматриваемой полости; Купр – коэффициент упругости полости с жидкостью; Vм – «мертвый» объем полости цилиндра, т.е. объем рабочей жидкости, оставшейся в цилиндре при максимальном ходе поршня; S – площадь полости цилиндра; x – перемещение поршня; Е – приведенный объемный модуль упругости рабочей жидкости в упругой оболочке цилиндра; Еж – объемный модуль упругости рабочей жидкости; D, δ – диаметр и толщина стенки цилиндра; Ест – модуль упругости материала стенки цилиндра.
Для вычисления силы, действующей на поршень со стороны газа, необходимо знать уравнение состояния газа. Упругая характеристика газовой полости определяется как зависимость между действующей силой Fупр и смещением поршня х. В соответствии с первым законом термодинамики [17]
 (10)
(10)
где рг – текущее значение избыточного давления газа в газовой полости; V – текущее значение объема газовой полости; х – перемещение поршня.
При работе «газовой пружины» возможны различные условия теплообмена между газом, находящимся в полости пневмогидравлического устройства, и окружающей средой. При хорошем теплообмене процессы, протекающие в объеме камеры, могут быть близкими к изотермным [18]. Однако в общем случае изменение состояния газа в зависимости от продолжительности процесса и конкретных условий окружающей среды может происходить по разным законам. При этом во всех случаях должно удовлетворяться уравнение состояния идеального газа. Такими процессами являются политропические процессы, характеризуемые уравнением
 (11)
(11)
где рг и рг0 – текущее и начальное значение давления газа в полости соответственно; V и V0 – текущее и начальное значение объема газовой полости; n – показатель политропы.
С достаточной для практики точностью можно принять в расчетах показатель политропы n = 1,25…1,28 [18].
2.2. Математическая модель пневмогидравлической рессоры с противодавлением
Расчетная схема рессоры приведена на рис. 6.
Рис. 6. Расчетная схема гидропневматической рессоры с противодавлением
Запишем выражения для расходов в полостях ПГР:
![]() (12)
(12)
![]() (13)
(13)
 (14)
(14)
 (15)
(15)
![]() (16)
(16)
![]() (17)
(17)
Уравнения для давлений в полостях ПГР имеют вид
 (18)
(18)
 (19)
(19)
 (20)
(20)
 (21)
(21)
 (22)
(22)
 (23)
(23)
 (24)
(24)
 (25)
(25)
 (26)
(26)
 (27)
(27)
Движение поршня совместно с колесом МКМ описывается выражением
 (28)
(28)
Движение поршней-разделителей может быть описано уравнениями
 (29)
(29)
 (30)
(30)
Совместное решение уравнений (12) – (30) полностью описывает рабочие процессы, протекающие в гидропневматической рессоре с противодавлением.
Разработанная модель реализована в программном комплексе SIMULINK, структурная схема модели приведена на рис. 7.

Рис. 7. Структурная схема математической модели пневмогидравлической рессоры с противодавлением
3. Определение конструктивных параметров пневмогидравлической рессоры с противодавлением
Исходными данными для расчета упругой характеристики рессоры служат кинематика подвески, конструктивные параметры самой рессоры, статическая нагрузка, действующая на каждое колесо, рабочая и заправочная температуры, параметры жидкости и газа, используемых в качестве рабочих тел в рессоре.
Сама упругая характеристика рессоры представляет собой зависимость давления в газовой камере от хода штока.
Исходными данными для расчета гидроаккумуляторов пневмогидрорессоры являются:
· сила в статическом положении Fpgr0;
· жесткость подвески в статическом положении cp;
· силы в крайних положениях гидроцилиндра ПГР Fpgr_max, Fpgr_min.
Параметры, которые необходимо рассчитать:
· объем гидроаккумуляторов (ГА) поршневой и штоковой полости VaA, VaB;
· заполнение ГА поршневой и штоковой полостей рабочей жидкостью в статическом положении VfaA, VfaB;
· давление газа ГА поршневой и штоковой полостей в статическом положении p0A, p0B.
Термодинамический процесс принимается политропным, коэффициент политропы - 1,25. Схема для расчета ГПР показана на рис. 8.
Уравнения, описывающие работу газа в ГА поршневой и штоковой полости в статике [18], имеют вид
![]() (31)
(31)
![]() (32)
(32)
где АА, АВ – площади поршневой и штоковой полостей гидроцилиндра соответственно; х – перемещение поршня гидроцилиндра; pA и pB – давления газа в полостях гидроаккумуляторов, соответствующие перемещению поршня х; n – коэффициент политропы.
Статическая характеристика ПГР описывается уравнением
![]()
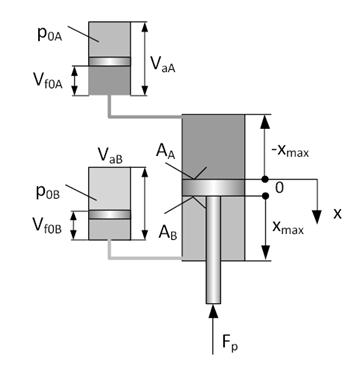
Рис. 8. Схема для расчета ПГР
Выражая из (31) и (32) pA(x) и pB(x), получим

Жесткость подвески в статическом положении есть тангенс угла наклона касательной статической характеристики при x=0:

Составим систему из 4-х уравнений, используя исходные данные:
- условие обеспечения силы в статическом положении (x=0)
![]()
- условие обеспечения максимальной силы в крайнем убранном положении
(x= -xmax)

- условие обеспечения минимальной силы в крайнем выдвинутом положении (x=xmin):

В данной системе уравнений имеются следующие неизвестные: ![]() .
.
Для разрешения данной системы необходимо задаться значениями двух переменных. Значения ![]() могут быть определены из условия предотвращения полной разрядки гидроаккумуляторов в крайних положениях:
могут быть определены из условия предотвращения полной разрядки гидроаккумуляторов в крайних положениях:
![]()
![]()
Здесь к1, к2 – коэффициенты запаса.
Таким образом, система нелинейных алгебраических уравнений может быть разрешена численными методами. В таблице 2 представлены результаты расчета конструктивных параметров пневмогидравлической рессоры.
Площади дросселирующих отверстий поршневой и штоковой полостей подбирались исходя из условия совпадения суммарных упруго-демпфирующих характеристик пневмогидравлической рессоры как заданных, изображенных на рис. 1 и 2, так и полученных на основе моделирования. Зависимость расхода жидкости через дроссель определяется уравнением (2).
Демпфирующая сила при ходе сжатия [18] определяется выражением

Демпфирующая сила при ходе отбоя вычисляется по формуле

где vпор – скорость поршня; fдрA – площадь рабочего проходного сечения дросселя верхнего гидроаккумулятора; fдрB – площадь рабочего проходного сечения дросселя нижнего гидроаккумулятора.
Таблица 2
Конструктивные параметры пневмогидравлической рессоры с противодавлением
Параметр | Размерность | Значения |
Диаметр поршня гидроцилиндра | м | 0,14 |
Диаметр штока гидроцилиндра | м | 0,115 |
Полный ход поршня гидро-цилиндра | м | 0,235 |
Объем ГА поршневой полости | л | 6,0 |
Объем ГА штоковой полости | л | 1,8 |
Начальное давление газа в ГА поршневой полости | атм | 135 |
Начальное давление газа в ГА штоковой полости | атм | 45 |
Площадь дросселирующего отверстия поршневой полости для высокого уровня демпфирования | м2 | 3,8×10-5 |
Площадь дросселирующего отверстия поршневой полости для низкого уровня демпфирования | м2 | 9,5×10-5 |
Площадь дросселирующего отверстия штоковой полости | м2 | 2,83×10-5 |
На рис. 9 и 11 приведены заданные упруго-демпфирующие характеристики подвески МКМ для высокого уровня демпфирования (приведены к колесу), полученные суммированием графиков рис. 1 и 2. На рис. 10 и 12 показаны аналогичные графики нагрузочных характеристик, полученные при моделировании работы пневмогидравлической рессоры. На рис. 13 – 16 соответственно – то же, для низкого уровня демпфирования. Как видим, получено хорошее соответствие заданных нагрузочных характеристик и характеристик, полученных при моделировании (разница не превышает 5 %).
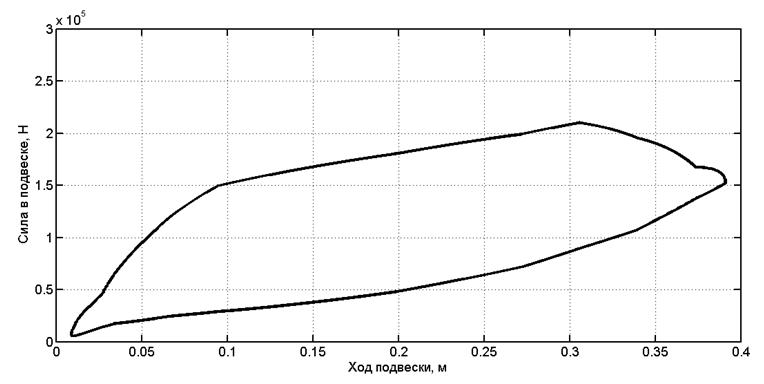
Рис. 9. Исходная нагрузочная характеристика подвески в координатах «сила – ход подвески», приведенная к колесу, для случая высокого уровня демпфирования
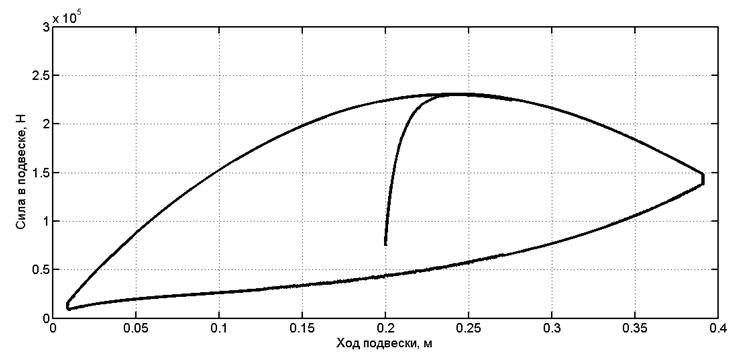
Рис. 10. Нагрузочная характеристика ПГР в координатах «сила – ход подвески», приведенная к колесу, для случая высокого уровня демпфирования, полученная моделированием
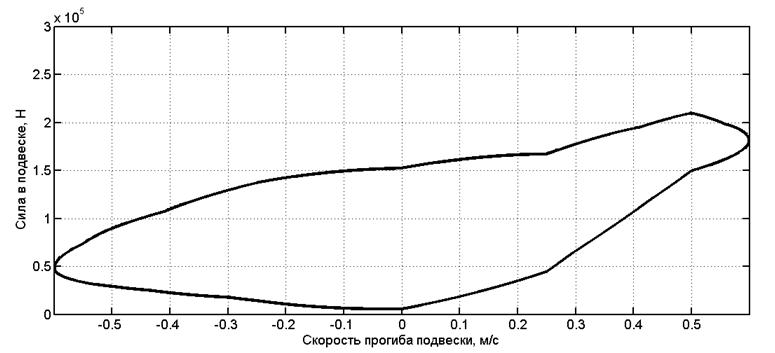
Рис. 11. Исходная нагрузочная характеристика подвески в координатах «сила – скорость прогиба подвески», приведенная к колесу, для случая высокого уровня демпфирования
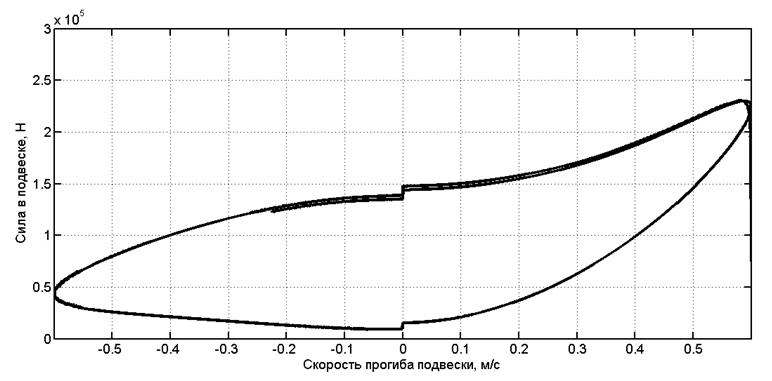
Рис. 12. Нагрузочная характеристика ПГР в координатах «сила – скорость прогиба подвески», приведенная к колесу, для случая высокого уровня демпфирования, полученная моделированием
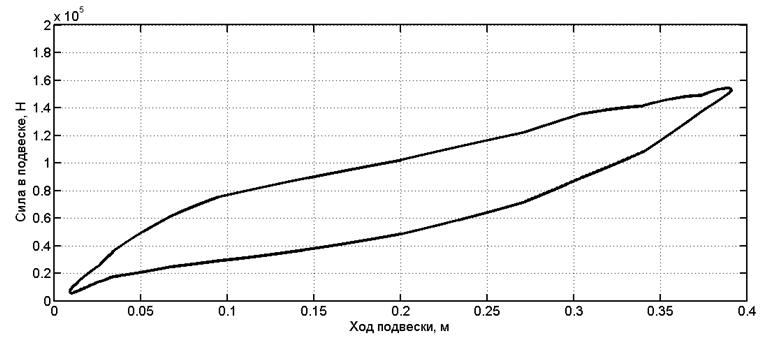
Рис. 13. Исходная нагрузочная характеристика подвески в координатах «сила – ход подвески», приведенная к колесу, для случая низкого уровня демпфирования
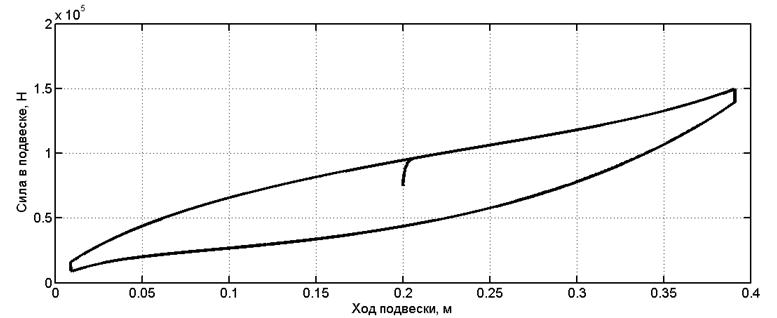
Рис. 14. Нагрузочная характеристика ПГР в координатах «сила – ход подвески», приведенная к колесу, для случая низкого уровня демпфирования, полученная моделированием
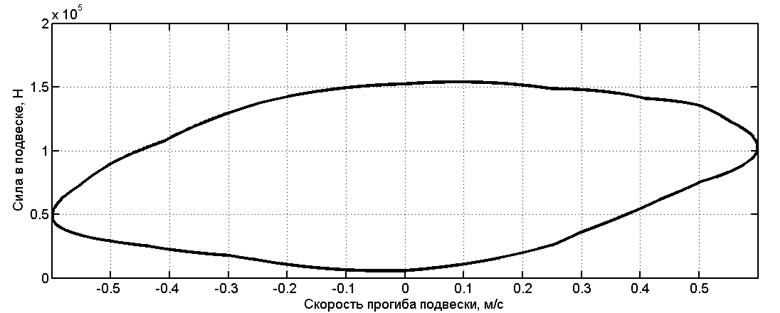
Рис. 15. Исходная нагрузочная характеристика подвески в координатах «сила – скорость прогиба подвески», приведенная к колесу, для случая низкого уровня демпфирования
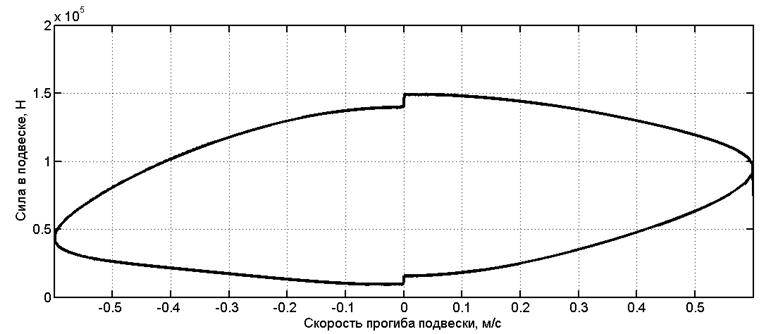
Рис. 16. Нагрузочная характеристика ПГР в координатах «сила – скорость прогиба подвески», приведенная к колесу, для случая низкого уровня демпфирования, полученная моделированием
Заключение
В работе предложен подход к определению характеристик двухуровневого демпфирования управляемой системы подрессоривания многоосных колесных машин. Разработана методика определения конструктивных параметров управляемой пневмогидравлической рессоры (на примере ПГР с противодавлением). Данная методика может быть использована при разработке релейных систем управления подвеской МКМ на стадии проектирования.
Список литературы
1. Сухоруков А.В. Управление демпфирующими элементами в системе подрессоривания быстроходной гусеничной машины: Дисс. ... канд. техн. наук. Специальность 05.05.03 - Автомобили и тракторы.- М., 2003.- 204 с.
2. Ротенберг Р.В. Особенности колебаний многоосных автомобилей
// Автомобильная промышленность. – 1963. – № 2. – с. 30 – 35.
3. Платонов В.Ф. Полноприводные автомобили. – М.: Машиностроение, 1981. – 280 с.
4. Karnopp D., Crosby M.J., Harwood R.A. Vibration Control Using Semi-Active Force Generations // Transactions of the ASME. Series B. Jornal of engineering for industry. - 1974. - V. 96, N 2. - P. 239-247.
5. Кольцов В.И. Принципиальные возможности подвески наземных видов транспорта: Дисс. . . . канд. техн. наук. Специальность 05.05.03 - Автомобили и тракторы - M., 1967. - 231 с.
6. Hrovat D., Margolis D., Hubbard M. Suboptimal semi-active Vehicle Suspensions. Proc. of the Joint Automatic Control Conference, San Francisco, California, 1980.
7. Фролов К.В., Синев А.В. Соловьев В.С. Исследования электрогидравлической виброзащитной системы с управлением по возмущающему ускорению // Виброзащита человека-оператора и колебания в машинах. - M.: Наука, 1977. - С. 13-16.
8. Жилейкин М.М. Разработка адаптивного алгоритма релейного управления двухуровневым демпфированием подвески многоосных колесных машин [Электронный ресурс] // Электрон. журн. «Наука и образование: электронное научно-техническое издание». 2011. Выпуск 12, № 77-30569/347444 – Режим доступа: http://technomag.edu.ru/doc/347444.html, свободный.
9. Дербаремдикер А.Д. Амортизаторы транспортных машин. – М.: Машиностроение, 1985. – 200 с.
10. Самонастраивающийся амортизатор с программированной демпфирующей характеристикой / А.Д. Дербаремдикер, Р.А. Мусарский, И.О. Степанов, М.А. Юдкевич // Автомобильная промышленность. 1985. – № 1. – С. 13 – 15.
11. Проектирование полноприводных колесных машин: Учебник для вузов: В 3 т. Т.3/Б.А. Афанасьев, Б.Н. Белоусов, Л.Ф. Жеглов и др.; Под ред. А.А. Полунгяна. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2008. – 432 с.Расчет и проектирование строительных и дорожных машин на ЭВМ / Е. Ю. Малиновский, Л. Б. Зарецкий, Ю. Г. Беренгард, М. М. Гайцгори и др. Под ред. Е. Ю. Малиновского. – М.: Машиностроение, 1980. – 216 с.
12. Автоматизированное проектирование машиностроительного гидропривода / И. И. Бажин, Ю. Г. Беренгард, М. М. Гайцгори и др. Под общей ред. С. А. Ермакова. – М.: Машиностроение, 1988. – 312 с.
13. Абрамов Е.И., Колесниченко К.А., Маслов В.Т. Элементы гидропривода (справочник). – Киев: «Техника», 1977. – 320 с.
14. Бартенев Г.М., Лаврентьев В.В. Трение и износ полимеров. – Л.: Изд-во «Химия», 1972.-240 с.
15. Крагельский И.В., Добычин М.Н., Комбалов В.С. Основы расчетов на трение и износ.- М.: Машиностроение, 1977.- 526 с.
16. Попов Д.Н. Динамика и регулирование гидро- и пневмосистем. – М.: Машиностроение, 1987. – 232 с.
17. Башта Т.М. Гидропривод и гидропневмоавтоматика. Учебник для вузов. – М.: Машиностроение, 1972. – 242 с.
18. Гликман Б.Ф. Математические модели пневмогидравлических систем. М.: Наука. Гл. ред. физ.-мат. лит., 1986. – 368 с.
Публикации с ключевыми словами: пневмогидравлическая рессора, упругая характеристика подвески, демпфирующая характеристика подвески, двухуровневое демпфирование
Публикации со словами: пневмогидравлическая рессора, упругая характеристика подвески, демпфирующая характеристика подвески, двухуровневое демпфирование
Смотри также:
- Разработка адаптивного закона релейного управления трехуровневым демпфированием упруго-демпфирующих элементов подвески многоосных колесных машин
- 77-30569/346642 Экспериментальное исследование нагрузочных характеристик двухкамерной пневмогидравлической рессоры подвески автомобильных платформ нового поколения средней и большой грузоподъёмности
- 77-30569/293578 Методика подбора характеристик управляемой подвески с двумя уровнями демпфирования многоосных колесных машин
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||