научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 12, декабрь 2011
УДК 629.33
МГТУ им. Н.Э. Баумана
В настоящее время на полноприводных автомобилях применяют трансмиссиями различного типа (механические, гидро- и электромеханические, гидрообъемные, комбинированные). При увеличении грузоподъемности, полной массы, числа осей и т.д. существует тенденция перехода от механической трансмиссии к другим типам, например, электромеханической. Объясняется это тем, что при увеличении числа осей существенно усложняется компоновка трансмиссии в механическом и гидромеханическом вариантах. Помимо вопросов компоновки использование электромеханического привода позволяет решить ряд задач: рациональное распределение и передача мощности от источника энергии к ведущим колесам при любой колесной формуле, расширение возможностей поиска оптимальных решений конструктивных схем. Электромеханический привод отличается гибкой системой регулирования, что позволяет расширить его функции для улучшения эксплуатационных характеристик колесной машины КМ [1].
Очевидно, что при различных условиях и режимах движения (разгон-торможение, криволинейное движение или прямолинейное преодоление подъема, движение по твердой или деформируемой опорной поверхности и т. д.) перераспределение мощности, подводимой к колесам разных бортов и осей, должно быть различным. Еще более сложной задача перераспределения мощности по движителям становится при возрастании количества движителей.
Несмотря на то, что данной проблеме посвящены многочисленные исследования как отечественных, так и зарубежных исследователей, анализ теоретических и практических разработок показал, что в настоящее время не существует единых критериев оценки схем трансмиссий и законов распределения мощности по колесам. В то же время, не существует и универсального закона управления индивидуальным приводом колес, по этой причине основное преимущество «гибких» трансмиссий (возможность подведения к движителю в любой момент времени в зависимости от условий движения необходимого крутящего момента) в настоящее время в полном объеме не используется.
Оптимизация параметров при выборе схем раздачи мощности по колесам для автомобилей различной колесной формулы и назначения важна не только в аспекте обеспечения необходимых тягово-динамических свойств, но и для соблюдения экологических требований. Таким образом, разработка закона управления индивидуальным приводом колес для транспортных средств различной колесной формулы с целью повышения энергоэффективности КМ является важной научной задачей.
При формировании принципов распределения мощности по колесам, как правило, используют следующие основные подходы: обеспечение равенства крутящих моментов в приводах всех колес (полностью дифференциальная трансмиссия), равенство частот вращения всех ведущих колес (полностью блокированная трансмиссия), равенство мощностей [2].
Очевидно, что требования к перераспределению моментов противоречивы и зависят от условий, в которых находится колесный движитель. Например, при прямолинейном движении со значительной нагрузкой (движение по бездорожью, с нагрузкой на крюке, на подъем) предпочтительной является блокированная трансмиссия. В случае же движения машины по криволинейной траектории, частота вращения каждого колеса должна определяться кривизной траектории, по которой оно перемещается. Одновременно желательно учесть перераспределение нормальных нагрузок между колесами, что при выполнении маневра еще более значимо, чем при прямолинейном разгоне, особенно, если движение осуществляется с высокими скоростями.
В настоящее время сформулированы следующие основные принципы распределения мощности по колесам при равномерном движении автомобиля: в любой момент времени с учетом режима движения к каждому колесному движителю должен подводиться момент, необходимый для преодоления сопротивления, приходящегося на колесо; момент должен распределяться по всем движителям с учетом условий взаимодействия колеса с опорным основанием; момент, подведенный к колесу, не должен превышать предел, соответствующий определенному значению буксования [2].
В рамках исследований, проводимых на кафедре «Колесные машины» МГТУ им. Н.Э. Баумана, опираясь на указанные выше теоретические положения, разработан алгоритм управления индивидуальным приводом колес на примере электромеханической трансмиссии.
При разработке алгоритма принят подход, исключающий описание внутренней динамики процессов, происходящих в электромеханических устройствах.
Реализация закона распределения мощности осуществлена в среде моделирования Simulink программного комплекса Matlab. Закон был внедрен в модель движения КМ 8×8 по твердой ровной опорной поверхности. С помощью имитационного математического моделирования движения в различных условиях была доказана эффективность предложенного варианта распределения мощности по колесам.
Схема замещения электромеханической трансмиссии, представленная на рис. 1, включает в себя следующие части: задатчик скорости движения автомобиля (Vvod), определяемой водителем путем воздействия на педаль «газа»; «Контроллер» (Controller), формирующий расчетные теоретические значения угловых скоростей каждого из движителей на основании входных сигналов; блок «Характеристика электродвигателя» (Characterdvigatel), определяющий величину крутящего момента, подводимого к каждому движителю; блок «Динамика колеса» (Dinamicakolesa), который является составной частью модели движения автомобиля, где интегрируются дифференциальные уравнения вращательного движения колес.
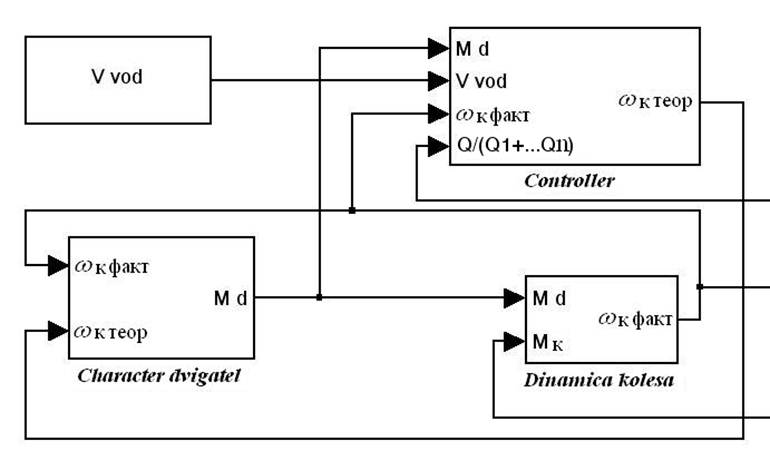
Рис. 1. Схема модели электромеханической трансмиссии с системой управления
Тяговый электродвигатель каждого из движителей в модели представляет объединение двух блоков: Characterdvigatelи Dinamicakolesa.
Использование «регуляторной» характеристики электродвигателя (аналогично принципу работы всережимного регулятора дизеля) позволяет максимально быстро выводить его на заданную частоту вращения:
| (1) |
где ![]() – фактическая частота вращения i-го колеса;
– фактическая частота вращения i-го колеса; ![]() – коэффициент, определяющий угол наклона «регуляторной»характеристики двигателя;
– коэффициент, определяющий угол наклона «регуляторной»характеристики двигателя; ![]() – теоретическая (расчетная) частота вращения i-го колеса;
– теоретическая (расчетная) частота вращения i-го колеса; ![]() – выходной момент электродвигателя i-го колеса.
– выходной момент электродвигателя i-го колеса.
Динамика выходного вала электродвигателя, связанного непосредственно с движителем, представлена на рис. 2 и описывается уравнением
| (2) |
где ![]() – угловое ускорение i-го колеса;
– угловое ускорение i-го колеса; ![]() – момент инерции i-го колеса (принимается равным для всех колес);
– момент инерции i-го колеса (принимается равным для всех колес); ![]() – крутящий момент на i-ом колесе, являющийся моментом сопротивления для выходного вала электродвигателя.
– крутящий момент на i-ом колесе, являющийся моментом сопротивления для выходного вала электродвигателя.
Рис. 2. Схема «Выходной вал электродвигателя – колесо»
| (3) |
где ![]() – тормозной момент на i-ом колесе;
– тормозной момент на i-ом колесе; ![]() – момент сопротивления качению i-го колеса;
– момент сопротивления качению i-го колеса; ![]() – сила взаимодействия i-го движителя с грунтом;
– сила взаимодействия i-го движителя с грунтом; ![]() – расстояние от оси колеса до опорной поверхности;
– расстояние от оси колеса до опорной поверхности; ![]() - продольная сила, приложенная к оси i-го колеса.
- продольная сила, приложенная к оси i-го колеса.
Согласно выражению (1), выходной момент электродвигателя формируется при сопоставлении теоретической и фактической угловых скоростей колес автомобиля. Фактическая скорость определяется путем установки датчиков угловых скоростей на каждом колесе. Теоретическая скорость является выходным значением блока Controller. Момент каждого из тяговых электродвигателей возможно косвенно определить по значению силы тока.
Суть алгоритма распределения моментов заключается в формировании теоретической угловой скорости вращения каждого колеса в зависимости от относительнойнормальной нагрузки на колесо. Далее, подводимый момент формируется таким образом, чтобы поддерживать требуемую угловую скорость.
Входными величинами блока Controllerявляются (см. рис. 1): ![]() – выходные (измеренные) моменты электродвигателей i-ых колес;
– выходные (измеренные) моменты электродвигателей i-ых колес; ![]() – фактические частоты вращения i-ых колес;
– фактические частоты вращения i-ых колес; ![]() – линейная скорость автомобиля, которая задается водителем воздействием на органы управления;
– линейная скорость автомобиля, которая задается водителем воздействием на органы управления;  – отношение измеренной нормальной силы на колесе
– отношение измеренной нормальной силы на колесе ![]() к суммарной нормальной силе по всем колесам (относительная нормальная нагрузка на колесе).
к суммарной нормальной силе по всем колесам (относительная нормальная нагрузка на колесе).
Схема блока Controller представлена на рис. 3.
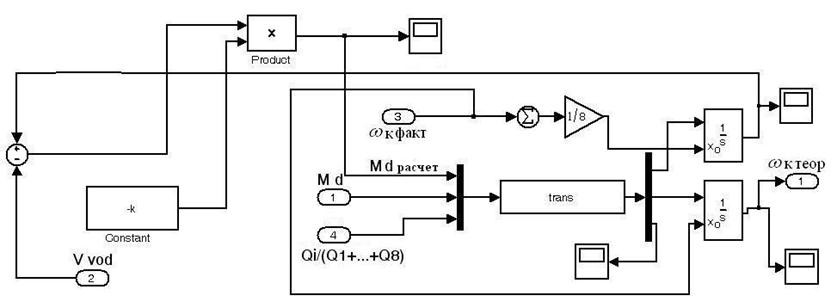
Рис. 3. Схема блока Controller
Предположим, что имеется полностью дифференциальная симметричная трансмиссия с одним двигателем, определяющая угловое ускорение для каждого колеса. Динамику такой трансмиссии можно описать следующей системой уравнений:
| (4) |
где i= 1…8, ![]() – угловое ускорение вращения вала двигателя,
– угловое ускорение вращения вала двигателя, ![]() – расчетное угловое ускорение вала привода i-го условного колеса,
– расчетное угловое ускорение вала привода i-го условного колеса, ![]() – момент инерции вала двигателя;
– момент инерции вала двигателя; ![]() – момент, развиваемый двигателем,
– момент, развиваемый двигателем, ![]() – момент, подводимый к i-ому колесу,
– момент, подводимый к i-ому колесу, ![]() – момент инерции привода i-го колеса;
– момент инерции привода i-го колеса; ![]() – момент сопротивления, приведенный к валу двигателя.
– момент сопротивления, приведенный к валу двигателя.
Момент двигателя формируется в соответствии с выражением (1), но входными величинами являются желаемая скорость движения (![]() ) и некоторая действительная скорость вращения условного вала двигателя (
) и некоторая действительная скорость вращения условного вала двигателя (![]() ), определяемая при решении системы (4). Момент двигателя равномерно перераспределяется между всеми колесами (для рассматриваемого случая перераспределенными моментами от двигателя являются моменты на выходных валах восьми тяговых электродвигателей
), определяемая при решении системы (4). Момент двигателя равномерно перераспределяется между всеми колесами (для рассматриваемого случая перераспределенными моментами от двигателя являются моменты на выходных валах восьми тяговых электродвигателей ![]() ).
).
В блоке«Тrans» (рис. 3), который является «S-функцией» системы Simulink, матричным способом происходит решение системы уравнений (4). При последующем интегрировании значений углового ускорения вала условного двигателя и расчетных угловых ускорений колес, являющихся решением системы уравнений (4) и выходящих из блока «Тrans», в качестве начальных условий используются первые значения текущих угловых скоростей колес, а для двигателя их среднее арифметическое значение.
Таким образом, возможно определить теоретические необходимые скорости вращения для каждого колеса в случае полностью дифференциальной трансмиссии. При реализации алгоритма в имитационной модели автомобиля все явления, характерные для дифференциальной трансмиссии, были полностью подтверждены. При разной скорости вращения колес в случае криволинейного движения момент перераспределяется между колесами так, что оставаясь одинаковым на всех колесах, равняется моменту для колеса, на котором реализуются минимальные тяговые усилия.
Пусть крутящий момент двигателя между колесами автомобиля распределяется пропорционально относительной нормальной нагрузке, приходящейся на каждое колесо. Отношение нормальной нагрузки на колесо к суммарной нагрузке по всем колесам является тем относительным показателем, который определяет ту часть момента от общего, которую можно подвести к конкретному движителю. Тогда вместо значения 1/8 в систему уравнений (4) в третье уравнение, определяющее перераспределение моментов, предложено вводить величину  . Система примет следующий вид:
. Система примет следующий вид:
| (5) |
где i = 1…8.
При практической реализации определение необходимых параметров не вызывает затруднений, величина ![]() может быть определена по силе в подвеске i-го колеса.
может быть определена по силе в подвеске i-го колеса.
При разработке системы индивидуального привода колес возможна реализация различных подходов к управлению тяговыми электродвигателями, как по «угловой скорости» так и «по моменту». В этой связи, обоснованные выше теоретические положения, касающиеся распределения крутящих моментов по движителям в зависимости от степени перераспределения суммарной нормальной нагрузки и управления при этом тяговыми двигателями по «угловой скорости», необходимо распространить на управление «по моменту»
Предположим, что имеется условная механическая трансмиссия с двигателем, для которого мощность определяется выражением:
| (6) |
где ![]() - максимальная мощность двигателя,
- максимальная мощность двигателя, ![]() - степень использования мощности двигателя (нажатие педали «газ» [0;1]);
- степень использования мощности двигателя (нажатие педали «газ» [0;1]); ![]() - выходной момент двигателя;
- выходной момент двигателя; ![]() - угловая скорость вращения выходного вала двигателя.
- угловая скорость вращения выходного вала двигателя.
Пусть выходной момент двигателя должен перераспределяться между всеми n движителями пропорционально относительной нормальной нагрузке, приходящейся на каждый из них:
| (7) |
где ![]() - крутящий момент на i-ом колесе,
- крутящий момент на i-ом колесе,  отношение нормальной силы на i-ом колесе
отношение нормальной силы на i-ом колесе ![]() к суммарной силе (весу колесной машины) по всем nколесам.
к суммарной силе (весу колесной машины) по всем nколесам.
Учитывая возможность перераспределения угловых скоростей вращения колес, получим:
| (8) |

где ![]() - угловая скорость i-го колеса;
- угловая скорость i-го колеса;
С использованием уравнений (6) – (8), получим:
| (9) |
Распространим выражение (9) на электромеханическую трансмиссию cиндивидуальным приводом колес, полагая что ![]() - момент на электродвигателе i-го колеса,
- момент на электродвигателе i-го колеса, ![]() - максимальная мощность электродвигателя каждого колеса:
- максимальная мощность электродвигателя каждого колеса:
| (10) |
При разработке закона управления трансмиссией с перераспределением моментов по колесам пропорционально относительной нормальной нагрузке был принят подход, исключающий описание внутренней динамики процессов, происходящих в электромеханических устройствах.
Закон реализован в среде моделирования Simulink программного комплекса Matlab путем включения в общую модель динамики колесной машины по твердой ровной опорной поверхности. С помощью имитационного математического моделирования движения в различных условиях была доказана эффективность предложенного закона распределения моментов по колесам и работоспособность системы управления тяговыми электродвигателями.
Схема замещения электромеханической трансмиссии включает: (рис. 1): «Контроллер» (Controller), в котором определяются моменты для каждого тягового электродвигателя, блок «Динамика колеса» (Dinamicakolesa), в котором рассчитываются действительные значения угловых скоростей каждого движителя.
Входными величинами блока «Контроллер» являются (рис. 4): h, ![]() ;
;  .
.
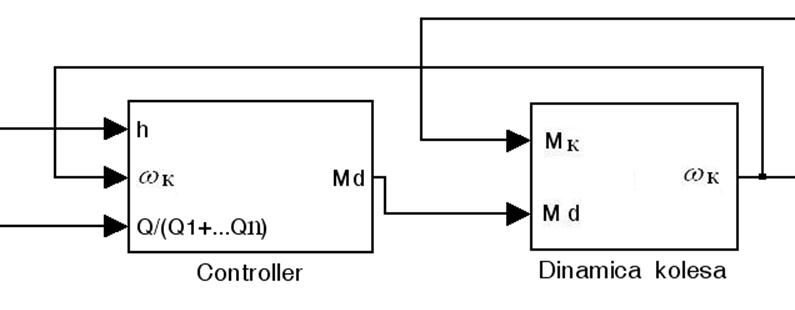
Рис. 4. Структурная схема модели электромеханической трансмиссии с системой управления электродвигателя «по моменту»
Динамика выходного вала электродвигателя, связанного непосредственно с движителем, также, как для случая управления «по угловой скорости», представлена на рис. 2 и описывается уравнением (3).
Внешняя характеристика электродвигателя соответствует графику, представленному на рис. 5. Введены следующие ограничения:
1) выходной момент ограничен максимальным значением ![]() ;
;
2) выходной момент ограничивается внешней характеристикой электродвигателя (ограничение по максимальной мощности) ![]() ;
;
3) угловая скорость вращения колеса ограничена (ограничение по максимально возможной скорости движения) ![]() .
.
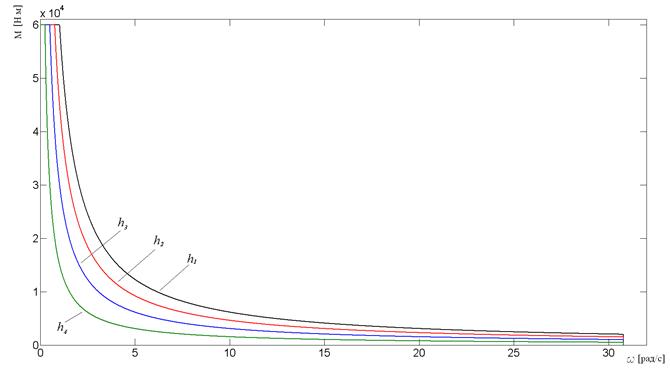
Рис. 5. Характеристики тягового электродвигателя, приведенные к скорости вращения движителя
На рис. 5 ![]() = 1;
= 1;![]() =0.75×
=0.75×![]() ;
;![]() =0.5×
=0.5×![]() ;
; ![]() =0.25×
=0.25×![]() .
.
При описании математической модели движения КМ 8×8 полной массой 60 т были приняты следующие допущения. Движение КМ как твердого тела рассматривается в горизонтальной плоскости на ровной, с учетом угла подъема в направлении движения, недеформируемой опорной поверхности и складывается из поступательного движения центра масс и вращательного движения вокруг центра масс (рис. 6). Система уравнений (11), описывающая данное движение, позволяет рассчитать текущие ускорения по значениям сил и моментов, действующим на КМ [3,4].
Для описания данного случая движения КМ вводятся следующие систем координат: неподвижная ![]() ; подвижная
; подвижная ![]() , связанная с корпусом КМ; система координат
, связанная с корпусом КМ; система координат ![]() , связанная с i-м колесом (рис. 6) [3, 4].
, связанная с i-м колесом (рис. 6) [3, 4].
| (11) |
где m– масса КМ; Jz– момент инерции КМ относительно оси z; ![]() – вектор скорости центра масс КМ;
– вектор скорости центра масс КМ; ![]() – вектор ускорения центра масс КМ (абсолютная производная от вектора скорости центра масс КМ);
– вектор ускорения центра масс КМ (абсолютная производная от вектора скорости центра масс КМ); ![]() – относительная производная от вектора скорости центра масс КМ;
– относительная производная от вектора скорости центра масс КМ; ![]() – вектор угловой скорости поворота КМ; θ - угол поворота КМ относительно оси
– вектор угловой скорости поворота КМ; θ - угол поворота КМ относительно оси ![]() ;
; ![]() ,
, ![]() – координаты центра масс КМ в неподвижной системе координат;
– координаты центра масс КМ в неподвижной системе координат; ![]() – вектор силы взаимодействия с грунтом, действующей на i-ое колесо;
– вектор силы взаимодействия с грунтом, действующей на i-ое колесо; ![]() – вектор силы сопротивления воздуха; Mпкi– момент сопротивления повороту i-го колеса;
– вектор силы сопротивления воздуха; Mпкi– момент сопротивления повороту i-го колеса; ![]() – угол преодолеваемого подъема (спуска) при прямолинейном движении.
– угол преодолеваемого подъема (спуска) при прямолинейном движении.
Рис. 6. Расчетная схема криволинейного движения КМ 8×8
Ниже представлены некоторые результаты теоретических исследований движения автомобиля при разработанных вариантах управления тяговыми электродвигателями.
При исследовании управления по «угловой скорости» моделировалось движение автомобиля на подъем с начальной скоростью V=35 км/ч на опорном основании «грунтовое основание» (коэффициент взаимодействия движителя с опорным основанием при полном буксовании μsmax = 0,6), угол подъема ![]() , угол поворота всех колес равняется нулю. Время моделирования t = 30 c.
, угол поворота всех колес равняется нулю. Время моделирования t = 30 c.
Результаты моделирования представлены на рис. 7–9. Их анализ показывает, что алгоритм управления индивидуальным распределением в исследуемых условиях «отработал» идентично блокированной трансмиссии: моменты перераспределились таким образом, чтобы обеспечить максимальные тяговые усилия на каждом движителе пропорционально относительной нормальной нагрузке.
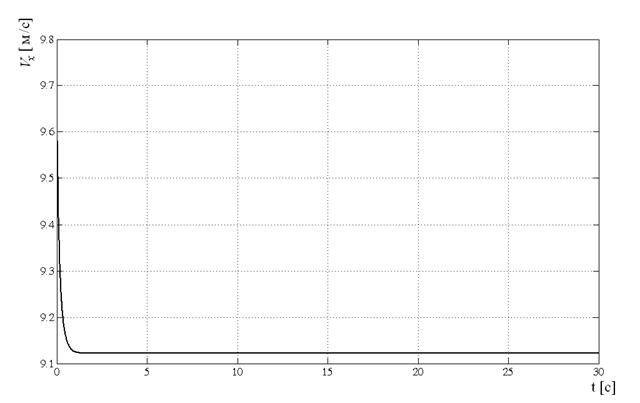
Рис. 7. Зависимость изменения линейной скорости автомобиля от времени при индивидуальной схеме трансмиссии
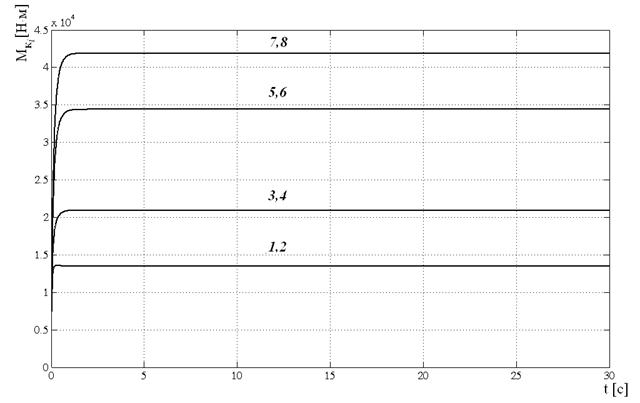
Рис. 8. Зависимость изменения крутящих моментов на колесах от времени при индивидуальной схеме трансмиссии
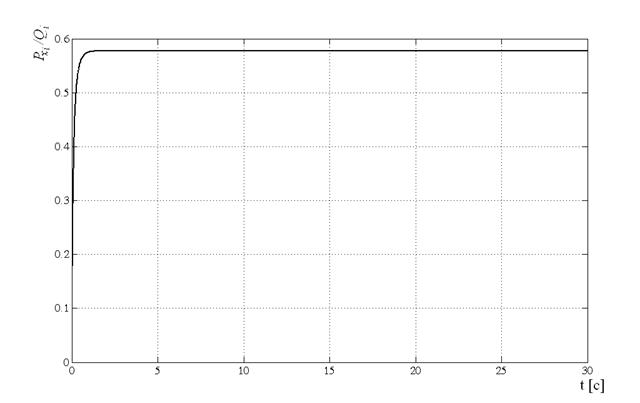
Рис. 9. Зависимость отношения продольной силы к нормальной реакции на каждом колесе при индивидуальной схеме трансмиссии
При исследовании управления «по моменту» моделировался следующий режим движения: вход и движение в повороте с фиксированным радиусом (![]() = 16 м) с поддержанием постоянной скорости. КМ начинает двигаться со скоростью V=30 км/ч (8,33 м/с), которая поддерживается постоянной, на опорном основании «грунтовое основание» ( с коэффициентом взаимодействия движителя с опорным основанием при полном буксовании μsmax = 0,6), все колеса автомобиля являются управляемыми и полюс рулевого управления находится в центре базы. Время моделирования t = 20 c;
= 16 м) с поддержанием постоянной скорости. КМ начинает двигаться со скоростью V=30 км/ч (8,33 м/с), которая поддерживается постоянной, на опорном основании «грунтовое основание» ( с коэффициентом взаимодействия движителя с опорным основанием при полном буксовании μsmax = 0,6), все колеса автомобиля являются управляемыми и полюс рулевого управления находится в центре базы. Время моделирования t = 20 c;
Закон управления поворотом колес (![]() ) представлен на рис. 10.
) представлен на рис. 10.
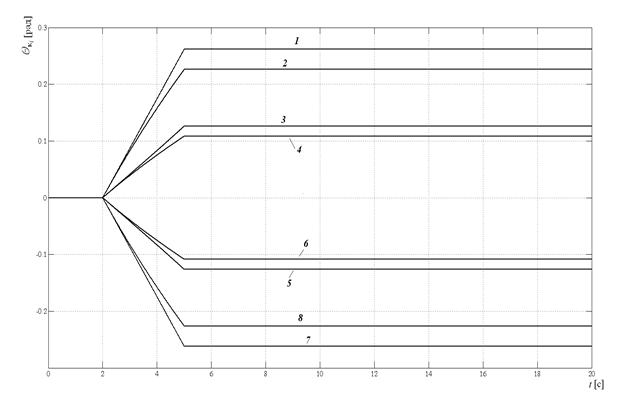
Рис. 10. Графическое отображение закона управления поворотом колес
Цифрами на рисунках обозначена принадлежность графика к соответствующему по колесу (см. рис. 6).
При исследовании движения КМ в повороте были получены следующие результаты (траектория установившегося движения представлена на рис. 11). Линейная скорость автомобиля после коррекции со стороны системы поддержания постоянной скорости (см. рис. 16), о работе которой свидетельствует наличие переходных процессов практически на всех графиках, и наступления установившегося режима движения, составила 8,5 м/с. Угловые скорости колес перераспределились в соответствии с траекториями их движения (рис. 7), а моменты к каждому колесу были подведены пропорционально соответствующей относительной нормальной силе на колесе (рис. 8 и рис. 10). График изменения отношения продольной реакции к нормальной силе на каждом колесе (рис. 9) доказывает, что сила тяги реализовалась также пропорционально нормальной силе, приходящейся на колесо, а ее удельное значение ![]() на каждом движителе было одинаковым.
на каждом движителе было одинаковым.
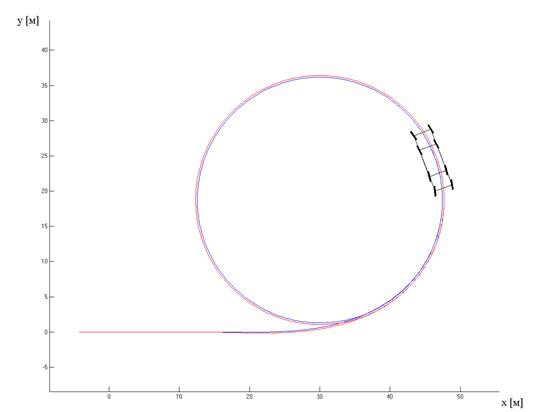
Рис. 11. Траектории движения КМ
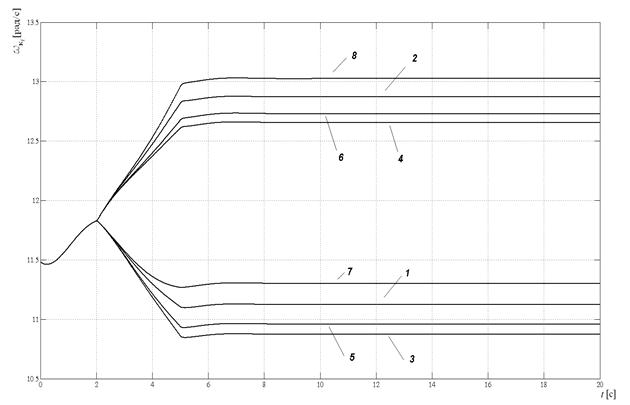
Рис. 12. Зависимость изменения угловых скоростей вращения колес от времени
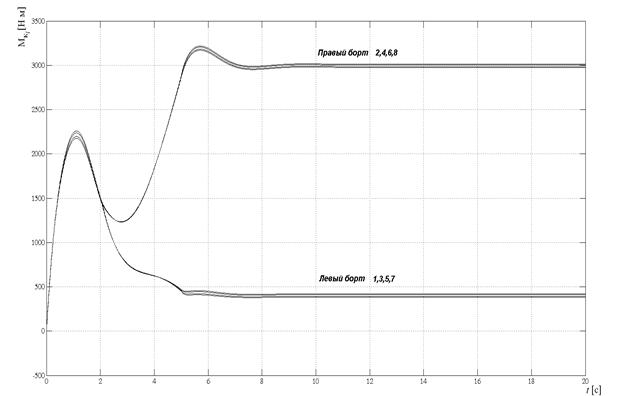
Рис. 13. Зависимость изменения крутящих моментов на колесах от времени
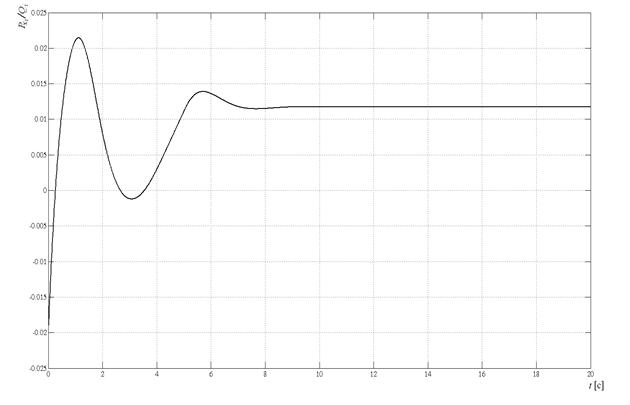
Рис. 14. Зависимость изменения отношения продольной силы к нормальной реакции на каждом колесе
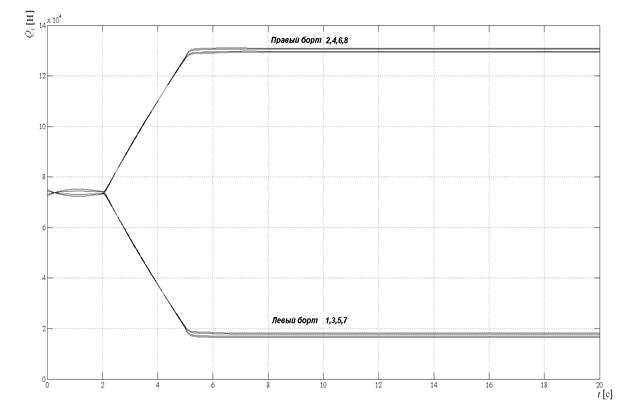
Рис. 15. Зависимость изменения нормальной реакции на каждом колесе
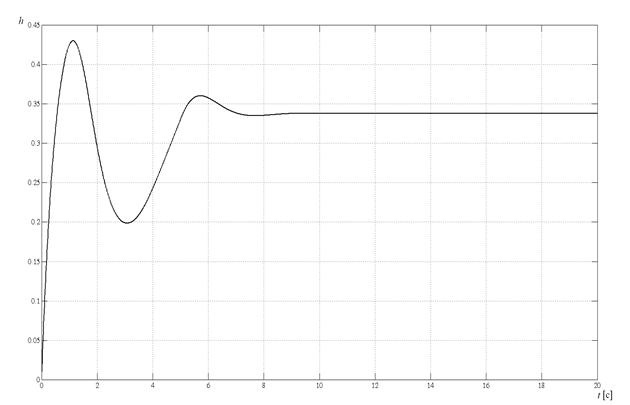
Рис. 16. Зависимость изменения степени использования мощности двигателя
Таким образом, можно отметить, что при движении в повороте предложенный закон управления объединяет свойства блокированной и дифференциальной трансмиссии: угловые скорости колес соответствуют траекториям движения, но при этом на каждом колесе реализуется различный крутящий момент, пропорциональный относительной нормальной нагрузке.
Эффективность разработанного закона управления электромеханической трансмиссией с распределением моментов по движителям пропорционально относительной нормальной нагрузке вне зависимости от принципа управления тяговыми электродвигателями («по угловой скорости» или «по моменту») доказана в рамках проведенных теоретических исследований. В то же время, многообразие дорожных условий не ограничивается принятыми для моделирования в представленной работе. Поэтому направления дальнейшей работы заключаются в расширении внешних воздействий при имитации движения автомобиля (движение на «миксте», разгон, движение подеформируемому опорному основанию, движение с тягой на крюке, движении при вывешивании одного или нескольких движителей и т. д.), а также в сравнении полученных результатов с результатами движения при дифференциальной и блокированной схемах трансмиссии с целью оценки как подвижности автомобиля в целом, так и ряда отдельных показателей, например, энергоэффективности закона управления.
СПИСОК ЛИТЕРАТУРЫ
1. . Проектирование полноприводных колёсных машин: Учеб. для вузов: В 3 т. Т. 2 / Б.А. Афанасьев, Л.Ф. Жеглов, В.Н. Зузов и др.; Под общ. ред. А.А. Полунгяна. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2008. – 528 с.: ил.
2. Белоусов Б.Н., Попов С.Д. Колесные транспортные средства особо большой грузоподъемности. Конструкция. Теория. Расчет / Под общ. ред. Б.Н. Белоусова. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2006. – 728 с.
3. Горелов В.А., Котиев Г.О. Прогнозирование характеристик криволинейного движения автомобиля с колесной формулой 6×6 при различных законах управления поворотом колёс задней оси // Изв. вузов. Машиностроение (М.). – 2008. – № 1. –С. 44–55.
4. Котиев Г.О., Чернышев Н.В., Горелов В.А. Математическая модель криволинейного движения автомобиля с колесной формулой 8×8 при различных способах управления поворотом // Журнал ААИ. – 2009. – № 2. – С. 34–40.
5. Теория силового привода колес автомобилей высокой проходимости / Под общ. ред. д.т.н., проф. С.Б. Шухмана. – М.: Агробизнесцентр, 2007. – 336 с.
Публикации с ключевыми словами: крутящий момент, угловая скорость, математическая модель, мощность, имитационное моделирование, алгоритм управления, индивидуальная трансмиссия, движитель
Публикации со словами: крутящий момент, угловая скорость, математическая модель, мощность, имитационное моделирование, алгоритм управления, индивидуальная трансмиссия, движитель
Смотри также:
- Оценка эффективности законов управления индивидуальным приводом движителей колесных транспортных комплексов
- Разработка закона распределения моментов по колесам многоосной колесной машины с электро-механической трансмиссией, выполненной по схеме «мотор-ось»
- Имитационное моделирование динамики прямолинейного движения колесной машины настенде "Беговые барабаны"
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||