научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 11, ноябрь 2009
DOI: 10.7463/1109.0133731
УДК 519.6
МГТУ им. Н.Э. Баумана, 105005,
Москва, 2-я Бауманская ул., д.5.
karpenko@nog.ru
Введение
Работа представляет собой продолжение работы [1]. Первый раздел посвящен разработке математических моделей кинематики и динамики гексапода с четырьмя степенями свободы, второй раздел - гексапода с шестью степенями свободы. В третьем разделе рассматриваются математические модели указанных механизмов с параллельной кинематикой, полученные средствами известного программного комплекса MatLab. В заключении формулируются основные результаты работы.
В работе используется двухуровневая нумерация формул и рисунков, содержащая номер раздела и номер объекта в этом разделе.
1 Кинематика и динамика гексапода с четырьмя степенями свободы
1.1 Обратная задача кинематики.Для гексапода (рисунок. 1.1) обратная кинематическая задача решается аналогично тому, как это сделано для трипода [1].
Пусть обобщенными координатами ![]() являются длины стержней
являются длины стержней ![]() ,
,![]() ,…,
,…,![]() соответственно. Пусть также в неподвижной декартовой системе координат
соответственно. Пусть также в неподвижной декартовой системе координат ![]() координаты точек
координаты точек ![]() равны
равны ![]() , а точек
, а точек ![]() -
- ![]() , где
, где ![]() ,
, ![]() .
.

Рисунок 1.1 - Схема гексапода
Во введенных обозначениях решение обратной задачи кинематики для гексапода (как с четырьмя, так и с шестью степенями свободы) дает следующая система уравнений:
![]() ;
;
![]() ;
;
…
![]() .
.
1.2 Прямая задача кинематики.Пусть невесомые стержни ![]()
![]() ,
, ![]() ,
, ![]() состоят из двух полуштанг, связанных поступательными кинематическими парами. Стержни
состоят из двух полуштанг, связанных поступательными кинематическими парами. Стержни ![]() ,
, ![]() присоединены к платформе в точках
присоединены к платформе в точках ![]() с помощью сферических шарниров, а к основанию в точках
с помощью сферических шарниров, а к основанию в точках ![]() - с помощью универсальных шарниров; стержень
- с помощью универсальных шарниров; стержень ![]() связан с основанием неподвижно, а с платформой – с помощью сферического шарнира (рисунок 1.2). Точки
связан с основанием неподвижно, а с платформой – с помощью сферического шарнира (рисунок 1.2). Точки ![]() лежат на окружности радиуса
лежат на окружности радиуса ![]() с центром в точке B, в которой находится центр масс платформы. Основание горизонтально и точки
с центром в точке B, в которой находится центр масс платформы. Основание горизонтально и точки ![]() расположены на окружности радиуса
расположены на окружности радиуса ![]() с центром в точке A. Опорные стержни
с центром в точке A. Опорные стержни ![]() имеют длины
имеют длины ![]() ,
, ![]() и наклонены к плоскости основания под углами
и наклонены к плоскости основания под углами ![]() , (
, (![]() ). Расстояние между точкой
). Расстояние между точкой ![]() и основанием (плоскостью
и основанием (плоскостью ![]() ) обозначим
) обозначим ![]() .
.
Свяжем с основанием систему координат ![]() таким образом, что начало координат A совпадает с центром симметрии основания, ось
таким образом, что начало координат A совпадает с центром симметрии основания, ось ![]() проходит через шарнир
проходит через шарнир ![]() , ось
, ось ![]() направлена по нормали к основанию, а ось
направлена по нормали к основанию, а ось ![]() образует с осями
образует с осями ![]() ,
, ![]() правую тройку. Аналогично, свяжем с платформой систему координат
правую тройку. Аналогично, свяжем с платформой систему координат ![]() (рисунок 1.2).
(рисунок 1.2).

Рисунок 1.2 - Геометрия гексапода с четырьмя степенями свободы
Положение шарниров ![]() в системе координат
в системе координат ![]() определяется векторами
определяется векторами
![]() ,
, ![]() . (1.1)
. (1.1)
Аналогично, положение шарниров ![]() в системе координат
в системе координат ![]() определяется векторами
определяется векторами
![]() ,
, ![]() . (1.2)
. (1.2)
Положение платформы относительно основания определяется углами Эйлера ![]() (рисунок 1.3) и вектором
(рисунок 1.3) и вектором ![]() .
.
Таким образом, геометрические соотношения между системами координат ![]() ,
, ![]() можно представить в виде (
можно представить в виде (![]() ) матрицы однородных преобразований
) матрицы однородных преобразований
 (1.3)
(1.3)
где компоненты матрицы выражаются через углы Эйлера следующим образом:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()

Рисунок 1.3 - К преобразованию систем координат
Из выражений (1.2), (1.3) следует, что положение шарнира ![]() ,
, ![]() в системе координат
в системе координат ![]() определяется вектором
определяется вектором
 . (1.4)
. (1.4)
Отсюда следует, что
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Из формул (1.1), (1.4) следует, что обобщенная координата ![]() , как функция расстояния
, как функция расстояния ![]() и углов
и углов ![]() определяется выражением
определяется выражением
![]() ,
, ![]() . (1.5)
. (1.5)
Выражения для скоростей и ускорений концов штанг ![]() (точек
(точек ![]() ) можно найти, дифференцируя и дважды дифференцируя по
) можно найти, дифференцируя и дважды дифференцируя по ![]() выражения (1.5). Однако эти выражения оказываются слишком громоздкими и мало пригодными для практического использования. Исследование скоростей и ускорений концов штанг
выражения (1.5). Однако эти выражения оказываются слишком громоздкими и мало пригодными для практического использования. Исследование скоростей и ускорений концов штанг ![]() проще производить с помощью математического моделирования, например, с использованием программной системы MatLab (см. ниже).
проще производить с помощью математического моделирования, например, с использованием программной системы MatLab (см. ниже).
1.3 Динамика механизма.По методике работы [1] найдем уравнения движения платформы в форме уравнений Лагранжа
 ,
, ![]() , (1.6)
, (1.6)
где ![]() - кинетическая энергия системы;
- кинетическая энергия системы; ![]() ,
, ![]() ,
, ![]() ,
,![]() - обобщенные координаты;
- обобщенные координаты; ![]() - обобщенная сила, соответствующая
- обобщенная сила, соответствующая ![]() -ой обобщенной координате.
-ой обобщенной координате.
Положим, что платформа, как твердое тело, симметрична относительно оси ![]() , так что ее моменты инерции
, так что ее моменты инерции ![]() равны:
равны: ![]() (рисунок 1.4).
(рисунок 1.4).
Массу платформы обозначим ![]() . В таком случае ее кинетическая энергия равна
. В таком случае ее кинетическая энергия равна
 , (1.7)
, (1.7)
где ![]() - величина полной скорости центра масс платформы
- величина полной скорости центра масс платформы ![]() .
.
Поскольку в системе координат ![]() вектор скорости
вектор скорости ![]() , эта величина равна
, эта величина равна ![]() (рисунок 1.4).
(рисунок 1.4).
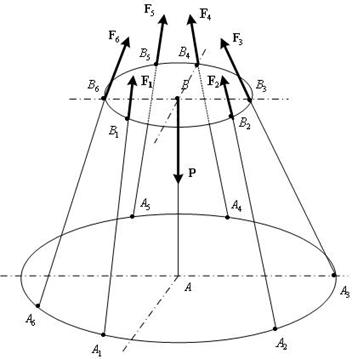
Рисунок 1.4 – Силы, действующие на платформу
Выпишем силы, действующие на платформу, а также радиусы-векторы ![]() ,
, ![]() ,
, ![]() точек их приложения в проекциях на оси системы координат
точек их приложения в проекциях на оси системы координат ![]() :
:
![]() ;
; ![]() ; (1.8)
; (1.8)
![]() ,
, ![]() . (1.9)
. (1.9)
Здесь
![]() .
.
Нам далее понадобятся матрицы Якоби ![]() векторов
векторов ![]()
![]()
![]() ,
, ![]() . Из (1.4) следует, что компоненты матрицы
. Из (1.4) следует, что компоненты матрицы ![]() определяются следующими формулами:
определяются следующими формулами:
![]() ;
;
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Составим выражение для работы на элементарных приращениях и, в соответствии с методикой составления уравнений Лагранжа, приравняем его нулю:
![]() . (1.10)
. (1.10)
Здесь
![]() ,
, ![]() ,
, ![]() .
.
Из выражений для компонентов матриц ![]() ,
, ![]() следует, что элементы вектора
следует, что элементы вектора ![]() определяются следующим образом:
определяются следующим образом:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
В приведенных выражениях для ![]() ,
, ![]() ,
, ![]() обозначим
обозначим ![]() коэффициент при
коэффициент при ![]() ,
, ![]() :
:
![]()
![]()
![]()
![]()
![]()
…
![]()
В этих обозначениях имеем
![]() ,
, ![]() ,
, ![]() ,
, ![]() (1.11)
(1.11)
Подставив выражения (1.11) в (1.10), после несложных преобразований получим
![]()
![]() +
+
![]() +
+![]() .
.
Приравнивая в последнем выражении коэффициенты при независимых приращениях ![]() , получим следующие значения обобщенных сил:
, получим следующие значения обобщенных сил:
![]() ;
;
![]() ;
; ![]() ;
; ![]()
Подставляя в уравнения (1.6) полученные выражения для обобщенных сил, а также выражения для кинетической энергии системы (1.7), получим искомую систему обыкновенных дифференциальных уравнений
![]()
![]() ,
, ![]()
![]() , (1.12)
, (1.12)
![]()
![]() ,
, ![]()
![]() . (1.13)
. (1.13)
В уравнениях (1.12), (1.13) силы ![]() - это внешние (управляющие) силы, которые могут быть заданы как функции времени, как функции обобщенных координат
- это внешние (управляющие) силы, которые могут быть заданы как функции времени, как функции обобщенных координат ![]() , а также как функции длин «своих» стрежней
, а также как функции длин «своих» стрежней ![]() . Наоборот, при заданных законах изменения величин
. Наоборот, при заданных законах изменения величин ![]() из этих уравнений могут быть найдены необходимые управляющие силы, как функции времени.
из этих уравнений могут быть найдены необходимые управляющие силы, как функции времени.
2 Кинематика и динамика гексапода с шестью степенями свободы
Обратная задача кинематики для гексапода рассмотрена в подразделе 1.1. Поэтому сразу перейдем к рассмотрению прямой задачи.
2.1 Прямая задача кинематики.Пусть невесомые стержни ![]()
![]() ,
, ![]() ,
, ![]() состоят из двух полуштанг, связанных поступательными кинематическими парами. Стержни
состоят из двух полуштанг, связанных поступательными кинематическими парами. Стержни ![]() ,
, ![]() присоединены к платформе в точках
присоединены к платформе в точках ![]() с помощью сферических шарниров, а к основанию в точках
с помощью сферических шарниров, а к основанию в точках ![]() - с помощью универсальных шарниров; стержень
- с помощью универсальных шарниров; стержень ![]() связан с основанием неподвижно, а с платформой – с помощью сферического шарнира (рисунок 2.1). Точки
связан с основанием неподвижно, а с платформой – с помощью сферического шарнира (рисунок 2.1). Точки ![]() лежат на окружности радиуса
лежат на окружности радиуса ![]() с центром в точке B, в которой находится центр масс платформы. Основание горизонтально и точки
с центром в точке B, в которой находится центр масс платформы. Основание горизонтально и точки ![]() расположены на окружности радиуса
расположены на окружности радиуса ![]() с центром в точке A. Опорные стержни
с центром в точке A. Опорные стержни ![]() имеют длины
имеют длины ![]() ,
, ![]() и наклонены к плоскости основания под углами
и наклонены к плоскости основания под углами ![]() , (
, (![]() ).
).
Свяжем с основанием систему координат ![]() таким образом, что начало координат A совпадает с центром симметрии основания, ось
таким образом, что начало координат A совпадает с центром симметрии основания, ось ![]() проходит через шарнир
проходит через шарнир ![]() , ось
, ось ![]() направлена по нормали к основанию, а ось
направлена по нормали к основанию, а ось ![]() образует с осями
образует с осями ![]() ,
, ![]() правую тройку. Аналогично, свяжем с платформой систему координат
правую тройку. Аналогично, свяжем с платформой систему координат ![]() (рисунок 2.1).
(рисунок 2.1).
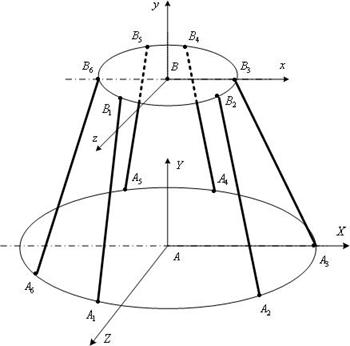
Рисунок 2.1 - Геометрия гексапода с шестью степенями свободы
Положение шарниров ![]() ,
, ![]() в системе координат
в системе координат ![]() определяется соответственно векторами
определяется соответственно векторами
![]() ,
, ![]() ,
, ![]() . (2.1)
. (2.1)
Положение платформы относительно основания определяется углами Эйлера ![]() (рисунок 1.3) и вектором
(рисунок 1.3) и вектором ![]() .
.
Подобно тому, как это сделано в разделе 1, геометрические соотношения между системами координат ![]() ,
, ![]() задаются в виде (
задаются в виде (![]() )-матрицы однородных преобразований
)-матрицы однородных преобразований
 ,
,
где компоненты ![]() ,
, ![]() матрицы
матрицы ![]() выражаются через углы Эйлера следующим образом
выражаются через углы Эйлера следующим образом
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Таким образом, положение шарнира ![]() ,
, ![]() в системе координат
в системе координат ![]() определяется вектором
определяется вектором
 . (2.2)
. (2.2)
Из формул (2.1), (2.2) следует, что обобщенная координата ![]() , как функция величин
, как функция величин ![]()
![]() определяется выражением
определяется выражением
![]() ,
, ![]() . (2.3)
. (2.3)
Выражения для линейных и угловых скоростей и ускорений концов штанг ![]() (точек
(точек ![]() ) можно найти, дифференцируя и дважды дифференцируя по
) можно найти, дифференцируя и дважды дифференцируя по ![]()
![]() выражения (2.3). Однако эти выражения оказываются слишком громоздкими и мало пригодными для практического использования. Исследование скоростей и ускорений концов штанг
выражения (2.3). Однако эти выражения оказываются слишком громоздкими и мало пригодными для практического использования. Исследование скоростей и ускорений концов штанг ![]() проще производить с помощью математического моделирования, например, с использованием программной системы MatLab (см. ниже).
проще производить с помощью математического моделирования, например, с использованием программной системы MatLab (см. ниже).
Заметим, что во введенных обозначениях углы между штангой ![]() ,
, ![]() и осями системы координат
и осями системы координат ![]() определяются формулой
определяются формулой
![]() ,
, ![]() ,
,
где углы ![]() ,
, ![]() ,
, ![]() - углы между штангой
- углы между штангой ![]() и осями
и осями ![]() ,
, ![]() ,
, ![]() соответственно.
соответственно.
2.2 Динамика механизма.По методике, использованной в подразделе 1.3, найдем уравнения движения платформы в форме уравнений Лагранжа
, ![]() , (2.4)
, (2.4)
где ![]() - кинетическая энергия системы;
- кинетическая энергия системы; ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
,![]() - обобщенные координаты;
- обобщенные координаты; ![]() - обобщенная сила, соответствующая
- обобщенная сила, соответствующая ![]() -ой обобщенной координате.
-ой обобщенной координате.
Положим, что платформа, как твердое тело, симметрична относительно оси ![]() , так что ее моменты инерции
, так что ее моменты инерции ![]() равны:
равны: ![]() (рисунок 2.2).
(рисунок 2.2).
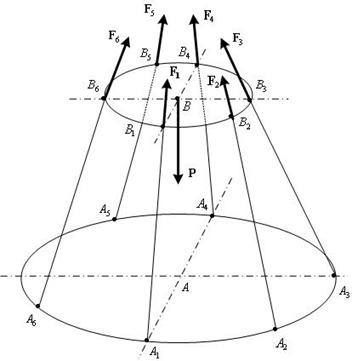
Рисунок 2.2 – Силы, действующие на платформу
Массу платформы обозначим ![]() . В таком случае ее кинетическая энергия равна
. В таком случае ее кинетическая энергия равна
 . (2.5)
. (2.5)
Выпишем силы, действующие на платформу, а также радиусы-векторы ![]() ,
, ![]() ,
, ![]() точек их приложения в проекциях на оси системы координат
точек их приложения в проекциях на оси системы координат ![]() :
:
![]() ;
; ![]() ; (2.6)
; (2.6)
![]() ,
, ![]() . (2.7)
. (2.7)
Нам далее понадобятся матрицы Якоби ![]() векторов
векторов ![]()
![]()
![]() ,
, ![]() . По аналогии с разделом 4 из (2.6), (2.7) имеем:
. По аналогии с разделом 4 из (2.6), (2.7) имеем:
![]() ;
; ![]() ;
; ![]() ;
;
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() ;
; ![]() ;
;
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() ;
; ![]() ;
;
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Составим выражение для работы на элементарных приращениях и, в соответствии с методикой составления уравнений Лагранжа, приравняем его нулю:
![]() . (2.8)
. (2.8)
Здесь
![]() ,
, ![]() ,
, ![]() .
.
Поскольку ![]() , скалярное произведение
, скалярное произведение ![]() . Из выражений для компонентов матриц
. Из выражений для компонентов матриц ![]() ,
, ![]() следует, что элементы вектора
следует, что элементы вектора ![]() определяются следующим образом:
определяются следующим образом:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Аналогично разделу 4, в приведенных выше выражениях для ![]() ,
, ![]() ,
, ![]() обозначим
обозначим ![]() коэффициент при
коэффициент при ![]() ,
, ![]() . В этих обозначениях получим более компактные выражения для элементарных приращений
. В этих обозначениях получим более компактные выражения для элементарных приращений ![]() ,
, ![]() ,
, ![]() :
:
![]() ; (2.9)
; (2.9)
![]() ; (2.10)
; (2.10)
![]() . (2.11)
. (2.11)
Подставив выражения (2.9) – (2.11) в (2.8), после несложных преобразований получим
![]()
![]()
![]()
![]() +
+![]() .
.
Приравнивая в последнем выражении коэффициенты при независимых приращениях ![]() , получим следующие значения обобщенных сил:
, получим следующие значения обобщенных сил:
![]() ;
; ![]() ;
; ![]() ;
;
![]() ;
; ![]() ;
; ![]()
Подставляя в уравнения (2.4) полученные выражения для обобщенных сил, а также выражения для кинетической энергии системы (2.5), получим искомую систему обыкновенных дифференциальных уравнений
![]()
![]() ,
, ![]()
![]() ,
, ![]()
![]() , (2.12)
, (2.12)
![]()
![]() , (2.13)
, (2.13)
![]()
![]() , (2.14)
, (2.14)
![]()
![]() . (2.15)
. (2.15)
В уравнениях (2.12) - (2.15) силы ![]() - это внешние (управляющие) силы, которые могут быть заданы как функции времени, как функции обобщенных координат
- это внешние (управляющие) силы, которые могут быть заданы как функции времени, как функции обобщенных координат ![]() , а также как функции длин «своих» стрежней
, а также как функции длин «своих» стрежней ![]() . Наоборот, при заданных законах изменения величин
. Наоборот, при заданных законах изменения величин ![]() из этих уравнений могут быть найдены необходимые управляющие силы, как функции времени.
из этих уравнений могут быть найдены необходимые управляющие силы, как функции времени.
3 MatLab моделирование кинематики и динамики гексапода с шестью степенями свободы
Simulink-модель указанного гексапода приведена на рисунке 3.1. Использованные в модели гексапода средства визуализации движения представлены на рисунке 3.2.

Рисунок 3.1 - Simulink-модель гексапода с шестью степенями свободы без датчиков и «осциллографов»

Рисунок 3.2 - Визуализации движения гексапода (фрагмент)
Тестирование рассматриваемой модели гексапода выполнено при изменении длины одной из штанг по гармонического закону ![]() - рисунок 3.3.
- рисунок 3.3.
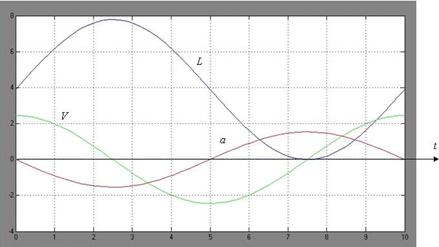
Рисунок 3.3 – Перемещение штанги (L), скорость штанги (V) и ускорение (a)
Заключение
Для гексапода с четырьмя степенями свободы получены следующие результаты: решена обратная задача кинематики; решена прямая задача кинематики - получены уравнения, определяющие длины штанг, как функции обобщенных координат; разработана математическая модель динамики механизма в виде системы обыкновенных дифференциальных уравнений относительно обобщенных координат. Аналогичные результаты получены для гексапода с шестью степенями свободы.
Кроме того, для гексапода с шестью степенями свободы разработана Simulink-модель его кинематики и динамики. Тестовые эксперименты с указанной моделью показала ее адекватность.
Полученные в работе результаты представляют самостоятельный интерес, а также могут быть использованы для построения математических моделей многосекционного робота-манипулятора типа «хобот».
Литература
1 ; Каганов Ю.Т., Карпенко А.П. Математическое моделирование кинематики и динамики секции робота-манипулятора типа «хобот». 2. Гексаподы // "Наука и образование: электронное научно-техническое издание", www.technomag.edu.ru, октябрь, 2009. http://technomag.edu.ru/doc/133262.html
Публикации с ключевыми словами: кинематика, динамика, робот-манипулятор, трипод, гексапод
Публикации со словами: кинематика, динамика, робот-манипулятор, трипод, гексапод
Смотри также:
- Математическое моделирование кинематики и динамики робота-манипулятора типа ╚хобот╩. 1. Математические модели секции манипулятора, как механизма параллельной кинематики типа ╚трипод╩
- Сравнение результатов анализа динамических систем на макроуровне с помощью отечественных и зарубежных комплексов САПР
- Оптимизация угловых и линейных размеров одно- и двухсекционного манипуляторов параллельной кинематики
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||