научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 09, сентябрь 2013
DOI: 10.7463/0913.0602200
УДК 621.865.8:592.6
Россия, МГТУ им. Н.Э. Баумана
Введение
Транспортные машины наземного применения, в том числе мобильные роботы (МР), эксплуатируют в различных условиях (климатических, рельефных, зонных), которые изменяются в широком диапазоне. При этом такие машины оснащают движителями различных типов (колесными, гусеничными и т.п.) и конструкций, которые, взаимодействуя с основанием, развивают тяговое усилие. Для создания тяги транспортные машины снабжают энергетическими установками, в качестве которых чаще всего применяют двигатели внутреннего сгорания (ДВС). На разных типах машин устанавливают двигатели различных типов с разной максимальной мощностью, которая, главным образом, выбирается из соображений обеспечить:
– высокую динамичность (при разгоне, рывке или обгоне) машины;
– приемлемую среднюю скорость;
– высокую маневренность и поворотливость [1].
Актуальность проблемы
Наметившиеся в мировой практике тенденции к возрастанию мощностей ДВС транспортных машин имеют и негативные последствия, выражающиеся в повышении тепловой напряженности, увеличении нагруженности и износа, снижении долговечности и срока службы. С другой стороны ДВС должны обладать высокой топливной экономичностью (вследствие дефицита и непрерывного роста стоимости топлива) и не оказывать вредного воздействия на окружающую среду (быть экологически безопасными) [2]. Статистические данные подтверждают [3], что доля использования максимальной мощности ДВС во всем процессе движения транспортных машин неуклонно снижается. Таким образом, загрузка ДВС падает, а топливную экономичность заметно улучшить не удается. Непрерывное увеличение мощности ДВС имеет и другие негативные последствия, выражающиеся, прежде всего, в увеличении объема двигателя и его веса. Кроме того, процесс создания все новых и новых двигателей сталкивается с увеличивающимися затратами на их разработку и производство.
Сказанное заставляет конструкторов и разработчиков энергетических установок искать новые (альтернативные) пути решения поставленных проблем.
Одним из путей увеличения эквивалентной мощности, передаваемой движителям машины и обеспечения интенсивного разгона или "рывка", является применение комбинированной энергетической установки (КЭУ), состоящей из основного источника энергии – ДВС с достигнутым уровнем мощности и вспомогательного источника энергии – аккумулирующего устройства.
Маховичный аккумулятор энергии (МАЭ), используемый в составе КЭУ (или так называемой гибридной системе) в качестве дополнительного источника энергии, предназначен в основном для осуществления быстрого (комбинированного) разгона машины, преодоления подъемов без снижения скорости и в других случаях "пикового спроса" мощности [1, 4].
В частности, примером устройства, аккумулирующего энергию торможения машины и развивающего большую мощность во время её разгона с помощью быстровращающегося маховика, является система, разработанная фирмой FlybridSystemsдля гоночных легковых автомобилей формулы 1 [5]. Маховик представляет собой комбинацию стального шкива с ободом, выполненным из углепластика, который развивает максимальную угловую скорость 6283 рад/с (60 000 об/мин) и способен запасать 0,4 МДж (1,44 кВт·ч) энергии (с учетом внутренних потерь). Привод МАЭ представляет собой тороидный вариатор с бесступенчатым изменением передаточного числа, который позволяет, по данным фирмы, кратковременно передавать мощность до 60 кВт.
Соотношение кинетических энергий маховика и транспортного средства (ТС)
Максимальная кинетическая энергия вращающегося маховика Eм определяется по формуле:
Eм = ½Jм ω2м max, (1)
где Jм – момент инерции маховика,
ωм max – максимальная угловая скорость вращения маховика,определяемая изусловия прочности материала, из которого он изготовлен [6].
Относительную энергоёмкость маховика Eо удобно выражать кинетических энергиях (кэн) транспортного средства, движущегося с максимальной скоростью. Кинетическая энергия транспортного средства, двигающегося с максимальной скоростью, определяется по формуле:
E тс max= ½·Mтс·V2тс max, (2)
где Mтс – масса транспортного средства,
Vтс max– максимальная скорость движения транспортного средства.
Следовательно, относительная энергоёмкостьEов кэн будет определяться по формуле:
Eо= Eм max/Eтс max.. (3)
Теоретическая мощность, развиваемая маховиком
Маховик с приводом, имеющим бесступенчатое изменение передаточного числа, может устанавливаться на входном валу трансмиссии параллельно основному двигателю. Рациональность выполнения такой установки подтверждена в работе [7]. Чтобы произвести количественную оценку влияния энергоёмкости МАЭ на приёмистость машины и подтвердить большие возможности по обеспечению аккумулятором пиковых нагрузок, необходимо получить зависимость мощности, развиваемой маховиком, от времени процесса разрядки. Для входного вала трансмиссии можно написать следующее соотношение:
![]() Nм = ξрηам ср(Eм max/t), (4)
Nм = ξрηам ср(Eм max/t), (4)
гдеNм – мощность, развиваемая МАЭ на указанном валу,
ηам ср – средний КПД привода МАЭ в процессе разрядки,
ξр – коэффициент разрядки,
t – время разрядки.
Относительное использование кинетической энергии маховика (коэффициент разрядки) ξр определяется выражением [4]:
ξр = (E1 – E2)/E1, (5)
где E1 – начальная (или максимальная) энергия маховика,
E2 – конечная энергия маховика.
Используя формулу (1), после преобразований, получим:
ξр = 1 – (ω2/ω1)2 , (6)
где ω1 – начальная угловая скорость маховика,
ω2 – конечная угловая скорость маховика.
На рис. 1 и 2 графически представлены результаты расчёта по формуле (4) мощности, развиваемой МАЭ на входном валу трансмиссии в зависимости от относительной энергоёмкостиEомаховика для машины массой 5400 кг, обладающей максимальной скоростью 50 км/ч (13,9 м/с) при ηам ср= 0,85 и 75%-ной разрядке маховика (ξр = 0,75). Кинетическая энергия транспортной машиныEтс maxмассой5400 кг,движущейся с максимальной скоростью, составляет 0,52 МДж(Eо = 1 кэн).
Полученные результаты свидетельствуют о потенциально высоких значениях мощности, реализуемой при разрядке маховика. Особенно велика эта мощность при процессах разрядки, занимающей время от 1 до 5 с (рис. 1).
|
|
Рис. 1. Мощность, развиваемая МАЭ на входном валу трансмиссии машины | Рис. 2. Мощность, развиваемая МАЭ на входном валу трансмиссии машины. |


Постановка задачи
Предварительный расчёт потребной энергоёмкости маховика, входящего в состав КЭУ, можно получить при исследовании процесса разгона такого ТС и при сравнении его с машиной, оснащённой обычным ДВС.
Поскольку существуют ограничения по времени протекания процесса разрядки маховика, меньше которого использование полученных высоких мощностей (см. рис. 1 и рис. 2) невозможно из-за перегрузки, в первую очередь привода МАЭ и трансмиссии, необходимо исследовать влияние энергоёмкости маховика на эти агрегаты в процессе разгона машины. Следовательно, потребуется уменьшение использования полной (теоретической) мощности маховика за счёт меньшего количества отбираемой от него энергии. Таким образом, перегрузка привода МАЭ и трансмиссии являются факторами, ограничивающими приёмистость машины при разгоне.
Поскольку для связи маховика с ведущими колесами используются приводы с бесступенчатым (плавным) изменением передаточного числа, то в качестве привода МАЭ предлагается использовать гидрообъемную передачу (ГОП). По габаритно-массовым показателям ГОП, предназначенные для полноразмерных машин массой 5 – 7 т, превосходят электромеханические передачи. Кроме того, применение ГОП позволяет обеспечить свободу компоновки и более высокую её плотность.
Для оценки влияния энергоёмкости маховика с ГОП, используемыми в приводе МАЭ на динамические качества машины, необходимо разработать кинематическую схему такой машины и составить её математическую модель.
Кинематическая схема ГМ с гидрообъёмной трансмиссией (ГОТ) и с КЭУ
На рис. 3 представлена кинематическая схема гусеничной машины (ГМ) с КЭУ и ГОТ, выполненной по бортовой схеме. Машина или мобильный робот (МР) с КЭУ и ГОТ содержит три независимые ГОП, каждая из которых состоит из насоса и гидромотора 1, 2, 10 и 11, соединенных трубопроводами и приводимых в движение от ДВС 3 через фрикцион 4 и раздаточный редуктор 5.
|
Рис. 3. Кинематическая схема ГМ с ГОТ и с КЭУ 1 – гидронасосы трансмиссии; 2 – гидромоторы трансмиссии; 3 – ДВС, 4 – фрикцион ДВС, 5 – раздаточный редуктор, 6 – карданный вал, 7 – коническая передача, 8 – бортовая передача, 9 – ведущие колеса ГМ, 10 – гидронасос привода МАЭ; 11 – гидромотор привода МАЭ; 12 – редуктор (мультипликатор) привода МАЭ; 13 – фрикцион маховика; 14 – маховик; 15 – вакуумная камера; 16 – подпиточные насосы. |

Гидромоторы 2 трансмиссии соединены с гусеничными движителями 9 посредством бортовых редукторов 8, а нерегулируемый гидромотор 11 привода маховика связан через передачу с постоянным передаточным числом 12 и муфту 13 с маховиком 14. Для восполнения потерь в ГОП используются подпиточные насосы 16. С целью уменьшения аэродинамических потерь быстровращающийся маховик помещен в вакуумную камеру 15.
Математическая модель ГМ с (ГОТ) и с КЭУ
Гусеничная машина с КЭУ и с ГОТ вследствие нежесткой кинематической связи ДВС и МАЭ с ведущими колесами, а также маховика с двигателем, представляет собой систему с тремя степенями свободы, к которой обычные методы расчета динамики машины с механической трансмиссией неприменимы. В целом ГМ с КЭУ, приведенная на рис. 3, представляется трехмассовой моделью.
Масса первого звена обладает моментом инерции Jд, представляющем собой сумму приведенных к коленчатому валу двигателя моментов инерции вращающихся и поступательно движущихся частей ДВС и обслуживающих его систем: раздаточного редуктора, насосов трансмиссии и насоса привода МАЭ, подпиточных насосов и соединительных муфт между указанными агрегатами.
Масса второго звена имеет момент инерцииJми представляет собой момент инерции собственно маховика и приведенных к нему моментов инерции вращающихся деталей привода и нерегулируемого гидромотора. Масса третьего звена имеет момент инерцииJвк, т.е. представляет собой сумму приведенных к ведущим колесам машины вращающихся масс и поступательно двигающихся частей тяговых гидромоторов трансмиссии, бортовых редукторов, соединительных муфт между агрегатами трансмиссии и гусеничного движителя. Между этими тремя массами существуют упругие связи.
При решении задач динамики управляемого движения машины или МР с КЭУ для учёта различных режимов поведения системы необходимо учитывать всю область допустимых режимов работы ДВС, которая ограничивается внешней скоростной, регуляторной и тормозной ветвями характеристики (рис. 4 и рис. 5). Поэтому статические характеристики ДВС представляются функцией двух переменных
Мд = Мд(ωд , uд),
где Мд– момент, развиваемый двигателем;
ωд – угловая скорость вала двигателя;
uд – параметр управления ДВС.
|
|
Рис. 4. Зависимость момента от угловой скорости двигателя ГАЗ-53А Позициями 1 – 4 обозначены сечения, показанные на рис. 5. | Рис. 5. Зависимость момента двигателя от параметра управления uд (положения дроссельной заслонки. |


Для исследования неравномерного движения ГМ с КЭУ используем принцип Даламбера. Из-за наличия упругих с проскальзыванием связей между гидромашинами и вследствие скольжения движителя по грунту система уравнений, описывающих движение ГМ с КЭУ, имеет вид:

где ем, ет – приведенные модули упругости жидкости и стенок трубопроводов привода МАЭ и трансмиссии, Мд, М1, М2, М1м и М2м – моменты ДВС, гидронасосов и гидромоторов трансмиссии и привода МАЭ соответственно, Мс и Мсм – моменты сопротивления движению машины и аэродинамический момент на валу МАЭ, ωм и ωвк – угловые скорости МАЭ и ведущих колес машины, pм , pкиpт – давления в приводе МАЭ, вакуумной камере и в трансмиссии, Q1, Q2, Q1м, иQ2м – расходы гидронасосов и гидромоторов трансмиссии и привода МАЭ,iд1и iд1м – передаточные числа от ДВС к гидронасосам трансмиссии и привода МАЭ,iвк2иi2м – передаточные числа от гидромоторов трансмиссии к ведущим колесам и от гидромотора привода МАЭ к маховику,u1, u2иu1м – параметры управления гидронасосами, гидромоторами бортов трансмиссии и гидронасосом привода МАЭ, ηвк – КПД движителя.
При исследовании динамики ГМ с КЭУ примем следующие допущения:
· разгон машины происходит на горизонтальном ровном участке при неизменном коэффициенте сопротивления движению f;
· колебания корпуса и гироскопические воздействия на машину при её разгоне не учитываются в силу их малости.
При комбинированном разгоне машины на энергии ДВС и МАЭ систему уравнений (7) будем решать при следующих значениях начальных условий:

где ωд Nmax – угловая скорость вала двигателя при максимальной мощности.
Результаты расчета и их анализ
На рис. 6 показаны графики изменения угловой скорости вала двигателя машины, оснащенной КЭУ, во времени для различных энергоёмкостей МАЭ, а также без использования МАЭ. Сравнение проводилось при одинаковом законе управления гидрообъёмной трансмиссией машины.
Рассматривалось последовательное синхронное регулирование до максимальных рабочих объёмов сначала гидронасосов трансмиссииq1 = q1 max, а затем уменьшение рабочих объёмов гидромоторов трансмиссии доq2 = q2min.= 0,06 л/об.
Закон управления трансмиссией во времени был принят следующим:

где а1 и а2 – определяемые расчётным путём коэффициенты.
Далее в расчётах приняты следующие значения коэффициентов: а1 = 0,25и а2 = 2,0.
При заданном законе управления трансмиссией мощности двигателя не хватает для осуществления разгона машины без использования МАЭ, что приводит к перегрузке двигателя и его остановке. Поэтому при разгоне машины без использования энергии МАЭ необходимо уменьшить интенсивность изменения параметровu1и u2во времени.Изменение закона управления ГОТ машины приведёт к увеличению времени её разгона. По данным [8] время разгона машины с ГОТ, оснащенной обычной энергетической установкой, до максимальной скорости (Vmax = 13,9 м/с) на грунте с суммарным коэффициентом сопротивления движению f = 0,04составляет 30 – 35 с.
|
|
Рис. 6. Изменение угловой скорости вала ДВС при разгоне машины | Рис. 7. Мощность, снимаемая с ДВС при разгоне машины. |

Интенсивное снижение частоты вращения вала ДВС, имеющего гибкую связь с маховиком максимальной энергоёмкостиEм max = 0,52 МДж (1 кэн),свидетельствует о недостатке энергии маховика для стабилизации работы ДВС при выбранном законе управления трансмиссией.
Маховик с максимальной энергоёмкостьюEо ≥ 2 кэн позволяет уменьшить диапазон изменения частоты вращения ДВС.
Для маховиков с максимальной энергоёмкостью 2 – 10 кэн скоростной диапазон двигателяdдсоставляет 1,5 – 1,65, что соответствует изменению угловой скорости коленчатого вала отvд Nmaxдоvд Mmax(рис. 3).
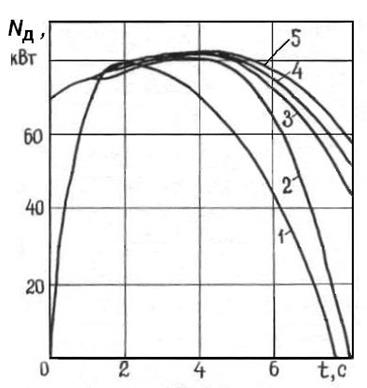
На рис. 7 показаны кривые изменения мощности, снимаемой с ДВС в процессе разгона машины.
Максимальная энергоёмкость маховика (т.е. его габаритные размеры) оказывают ещё большее влияние на рост давления в гидрообъёмной передаче привода МАЭ.
Менее заметное влияние энергоёмкость маховика оказывает на нагрузки, возникающие в трансмиссии при комбинированном разгоне машины. Особенно мало сказывается это на первом этапе разгона при регулировании только гидронасосов трансмиссии (рис. 8). Основную долюнагрузки в этом случае создаёт двигатель машины. Рост давления в трансмиссии машины в большей степени зависит от скорости изменения параметров управления u1иu2и от условий движения (суммарного коэффициента дорожного сопротивления), чем от величины энергоёмкости МАЭ. Основная нагрузка от МАЭ добавляется при регулировании гидромоторов трансмиссии, когда момента, развиваемого ДВС, становится недостаточно для отработки заданного закона управления трансмиссией. На рис. 6 это объясняется падением давления при использовании для разгона машины только энергии двигателя (кривая 1).
Маховик с относительной энергоемкостью 1 кэн нагружает трансмиссию приблизительно так же, как и двигатель без использования энергии маховика (рис. 8).
|
|
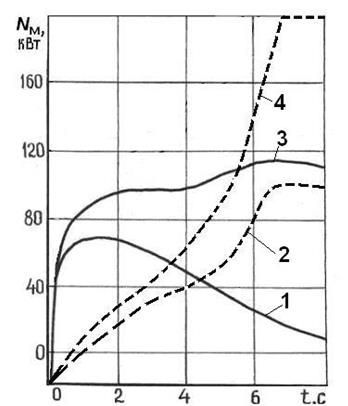
Рис. 8. Изменение давления в трансмиссии машины: ----- при комбинированном разгоне; _____ при разгоне на энергии МАЭ. 1 – без использования МАЭ; 2, 3 – Ео = 1 кэн; 4, 5 – Ео = 2 кэн | Рис. 9. Мощность, развиваемая приводом МАЭ: ----- при комбинированном разгоне; _____ при разгоне на энергии МАЭ. 1, 2 – Ео = 1 кэн; 3, 4 – Ео = 2 кэн. |
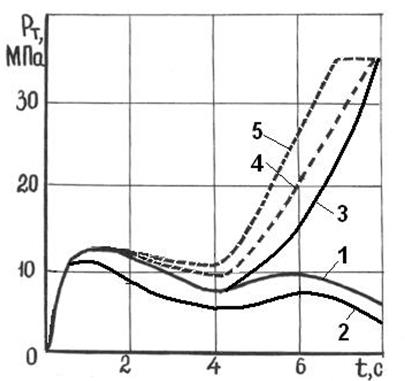
Маховики с относительной энергоемкостью 2 кэн развивают на заключительном этапе регулирования максимальное давление в трансмиссии машины и, следовательно, создают максимальный крутящий момент на ведущих колёсах.
Изменение потоков мощности, вырабатываемых маховиком, показаны на рис. 9.
Начальный этап разгона характеризуется невысокими значениями мощности МАЭ, так как основная доля мощности вырабатывается двигателем. Картина резко меняется на заключительном этапе разгона, когда мощности ДВС становится недостаточно и основная её часть поступает от маховика, причём, начиная с Ео = 2 кэн, отличие несущественно, а для случая разгона на энергии МАЭ более заметно.
На рис. 10 приведены значения расхода энергии МАЭ для двух значений относительной энергоёмкости МАЭ – 1 кэн и 2 кэн.
|
Рис. 10. Расход энергии МАЭ при различных способах разгона: 1 – на энергии МАЭ (Ео = 1 кэн); 2 – при комбинированном (Ео = 1 кэн); 3 – на энергии МАЭ (Ео = 2 кэн); 4 – при комбинированном (Ео = 2 кэн). |

Конечная величина коэффициента разрядки для случая разгона машины на энергии МАЭ(Ео = 1 кэн) достигает 1,0 (полная разрядка маховика), что недопустимо по условиям эксплуатации машины.Следовательно, для машины заданных параметров с ГОТ необходимо иметь маховик большей энергоёмкости.
Влияние энергоёмкости маховика на приёмистость машины может быть получено на основе анализа кривых, приведенных на рис. 11.
Использование маховика позволяет машине на первом этапе (при регулировании гидронасосов трансмиссии) осуществлять более интенсивный разгон с ускорениями на 20 – 25% превосходящими по величине аналогичные для машины не использующей КЭУ.
На втором этапе разгона разница в ускорении ещё больше, в основном благодаря 100%-ной перегрузке по давлению ГОП привода МАЭ. Это означает, что привод МАЭ обладает при неизменном рабочем объёме гидромашин удвоенной установочной мощностью, т.е.Nгоп уст= 370 кВт.
При разгоне на энергии МАЭ ускорения машины превосходят на 15 – 20% ускорения машины не использующей КЭУ. Исключение составляет только разгон на энергии маховика с Ео = 1 кэн. Это объясняется низкими средними значениями КПД привода МАЭ и трансмиссии машины. Потери энергии в агрегатах привода и трансмиссии составляют 50 – 55%.
|
|
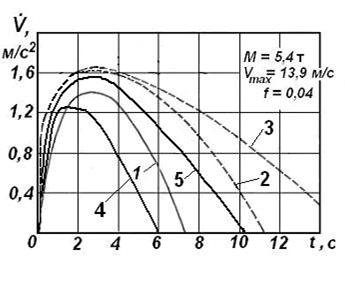
Рис. 11. Приёмистость при разгоне машины: ----- комбинированном; _____ на энергии МАЭ. 1 – без использования МАЭ; 2, 4 – Ео = 1 кэн; 3, 5 – Ео = 2 кэн. | Рис. 12. Изменение скорости при разгоне машины: ----- комбинированном; _____ на энергии МАЭ. 1 – без использования МАЭ; 2, 3 Ео = 1 кэн; 4, 5 – Ео = 2 кэн. |

Поэтому для машины с КЭУ, использующей в качестве основной трансмиссии ГОП, величина относительной энергоёмкости должна быть не менее 2 кэн.
На рис. 12 приведены кривые изменения скорости машины во времени.
Маховик с относительной энергоёмкостью 2 кэн при заданном законе управления трансмиссией на грунте с коэффициентом сопротивления движениюf = 0,04 позволяет машине достичь максимальной скорости движенияVmax = 13,9 м/с (50 км/ч) за 12 с. Путь разгона при этом составляет 101,4 м.
Таким образом, использование КЭУ при разгоне позволяет втрое улучшить динамические качества машины с ГОТ.
Лучшими динамическими качествами обладает та из сравниваемых машин, при разгоне которой получается более высокая средняя скорость
 , (11)
, (11)
где Sриtр – путь и время разгона до заданной скоростиV.
Маховик с относительной энергоёмкостью 2 кэн позволяет получить ![]() = 8,47 м/с (30,4 км/ч).
= 8,47 м/с (30,4 км/ч).
При использовании маховика с относительной энергоёмкостью 10 кэн время разгона машины до максимальной скорости составляет 9,2 с, путь разгона – 79,5 м при средней скорости разгона равной 8,66 м/с (31 км/ч). Эта величина всего лишь на 2% превосходит среднюю скорость![]() ,полученную при разгоне машины с МАЭ энергоёмкостью 2 кэн.
,полученную при разгоне машины с МАЭ энергоёмкостью 2 кэн.
Разгон машины только с использованием энергии МАЭ отличается меньшей интенсивностью (на рис. 12 – сплошные кривые). Для этого варианта разгона энергоёмкость маховика оказывает более заметное влияние на динамические качества машины.
Маховик с относительной энергоёмкостью 2 кэн позволяет при заданном законе управления на грунте сf= 0,04 развивать максимальную скорость 6,67 м/с (24 км/ч) и поддерживать её в течение (7 – 8) с на указанном уровне (рис. 12 – кривая 4).
В дальнейшем для осуществления разгона машины к трансмиссии и ведущим колёсам машины потребуется подключить ДВС. МАЭ с указанным уровнем энергоёмкости при заданном законе управления трансмиссией позволяет осуществить разгон машины со скоростью, превосходящей по величине скорость машины, не использующей КЭУ, особенно на заключительном этапе разгона при регулировании гидромоторов трансмиссии(t > 5 с).Это свидетельствует о высоких динамических качествах машины с КЭУ.
Естественно, при уменьшении коэффициента f и неизменном значении закона управления трансмиссией машина разгоняется более интенсивно.
Заключение
Для транспортных средств наиболее целесообразным признано вертикальное расположение оси маховика, т.е. плоскость вращения маховика располагается параллельно плоскости дороги [6]. В этом случае при колебаниях корпуса ТС в продольной плоскости движения или при вписывании его в крутой поворот оси маховика сообщается переносная угловая скорость ![]() . Учитывая при этом, что направления векторов собственного вращения маховика
. Учитывая при этом, что направления векторов собственного вращения маховика ![]() и
и ![]() взаимно перпендикулярны, определим гироскопический момент по формуле
взаимно перпендикулярны, определим гироскопический момент по формуле
Мг = Jм∙ωм∙ωтс. (12)
Выразим гироскопический момент с учетом формулы (1) через запасаемую маховиком максимальную кинетическую энергию
Мг = 2Eм max∙(ωтс/ωм max). (13)
При определении гироскопического момента учтем, что поворот ТС или колебания его корпуса происходят с угловой скоростью, не превышающей ωтс = 1,0 рад/с [4]. Для ТС весом 53 кН (массой 5400 кг) максимальный гироскопический момент Мг, определяемый по формуле (12) для Eм max = 1,04 МДж (Ео = 2 кэн), составит 993,3 Н·м (кг·м2/с2).
При ширине колеи ТС равной 2,2 м реакции от гироскопического момента, действующие на движители, составят 451,5 Н. При полном весе машины равном 53 кН суммарные реакции на передних и задних движителях одного борта составят около 26,5 кН.
Таким образом, реакции возрастут на движителях одного борта на 1,7 % и соответственно уменьшатся на такую же величину на движителях другого борта, что практически не окажет влияния на управляемость ТС. Т.е., даже при жесткой установке маховика в корпусе машины, возникающий гироскопический момент приводит к малозаметному перераспределению нормальных реакций между движителями. Кроме того, для снижения гироскопических воздействий на опоры маховика, его часто устанавливают на вибродемпфирующих элементах [4].
Формула (12) показывает, что для снижения гироскопического момента следует увеличивать ωм max, как это сделано, например, в системе Flybrid [5]. Однако в этом случае возникают конструктивные трудности при выполнении герметизации камеры маховика (потребуется увеличение уровня вакуумирования, применение магнитных подшипников и сложных уплотнений для удержания смазки). Кроме того, возрастут габариты маховика (в том числе всей системы) в осевом направлении. Таким образом, возрастёт суммарная стоимость всей системы и усложнится конструкция привода маховика.
Поскольку в статье рассмотрен вопрос повышения динамических качеств транспортной машины с комбинированной энергетической установкой, содержащей маховичный аккумулятор энергии при разгоне, который обычно осуществляется на ровном горизонтальном участке пути с постоянным коэффициентом сопротивления движению, влияние гироскопического момента на управляемость машины не учитывалось в силу его малости.
Выводы:
1. Использование комбинированной энергетической установки, состоящей из ДВС и маховичного аккумулятора энергии с гидрообъемным приводом с бесступенчатым изменением передаточного числа, позволяет значительно повысить динамические качества машины при разгоне в сравнении с машиной, оснащенной только ДВС.
2. Факторами, лимитирующими приёмистость машины с КЭУ, являются установочные мощности привода маховика и трансмиссии машины, т.е. ограничения, накладываемые на размеры моторно-трансмиссионных отделений (МТО) транспортных средств.
3. Увеличение относительной энергоёмкости маховика выше установленного предела в 2 кэн практически не приводит к выигрышу в динамических качествах машины при её разгоне, что объясняется указанными в п. 2 ограничениями.
Список литературы
1. Hanlon M. Audi's turbodiesel, electric flywheel hybrid, all-wheel drive prototype race car // Gizmag. 2012. March 15. Режим доступа: http://www.gizmag.com/audi-quattro-race-car/21665/ (дата обращения 26.03 2013).
2. Small K.A., Kazimi C. On the Costs of Air Pollution from Motor Vehicles // Journal of Transport Economics and Policy. 1995. Vol. 29, no. 1.P. 7-32.
3. Савочкин В.А., Дмитриев А.А. Статистическая динамика транспортных и тяговых гусеничных машин. М.: Машиностроение, 1993. 320 с.
4. Забавников Н.А., Корсунский В.А., Герасимов А.Н. Динамика гусеничной машины с маховичным аккумулятором энергии: учеб. пособие. М.: МВТУ им. Н.Э. Баумана. 1987. 44 с.
5. Magneti Marelli Kers // Racecar engineering. 2009. July 31. Режим доступа: http://www.racecar-engineering.com/articles/magneti-marelli-kers/ (дата обращения 26.03.2013).
6. Корсунский В.А. Повышение эффективности мобильных роботов путем использования дополнительного источника энергоснабжения – маховичного аккумулятора энергии // Наука и образование. МГТУ им. Н.Э. Баумана. Электрон. журн. 2013. № 5. DOI: 10.7463/0513.0566233.
7. Shen Sh., Veldpaus F. E. Analysis and Control of a Flywheel Hybrid Vehicular Powertrain // IEEE Transactions on control systems technology. 2004. Vol. 12, № 5. P. 645-660.
8. Ловцов Ю.И., Маслов В.К. Введение в динамику управляемого движения гусеничной машины с гидрообъёмной трансмиссией // Труды МВТУ им. Н.Э. Баумана. 1979. № 288. С. 1-17.
Публикации с ключевыми словами: гусеничная машина, маховичный аккумулятор энергии, энергоёмкость маховика, плотность энергии, комбинированная энергетическая установка, гидрообъёмная трансмиссия
Публикации со словами: гусеничная машина, маховичный аккумулятор энергии, энергоёмкость маховика, плотность энергии, комбинированная энергетическая установка, гидрообъёмная трансмиссия
Смотри также:
- Об оптимальном управлении гидрообъёмно-механическим приводом при разгоне маховика
- Повышение эффективности мобильных роботов путем использования дополнительного источника энергоснабжения – маховичного аккумулятора энергии
- Оценка эффективности метода повышения быстроходности двухзвенной гусеничной машины, использующего управление углом складывания секций в вертикальной плоскости во время движения
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||