научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 09, сентябрь 2010
DOI: 10.7463/0910.0157066
МГТУ им. Н.Э. Баумана
Введение
Серьезным недостатком классических многозвенных рычажных роботов-манипуляторов является их недостаточная жесткость, усложняющая управление этими манипуляторами, затрудняющая использование высокоэнергетического обрабатывающего инструмента и достижение высокой точности обработки. В значительной мере преодолеть указанные недостатки могут манипуляторы типа «хобот», построенные на основе многосекционных механизмов с параллельной структурой [1].
Манипуляторы типа «хобот» могут быть построены на основе механизмов параллельной кинематики с двумя, тремя, четырьмя и шестью степенями свободы [2]. В работе рассматривается манипулятор, секции которого представляют собой триподы – параллельные механизмы, обладающие двумя вращательными степенями свободы относительно двух осей, перпендикулярных продольной оси предыдущей секции манипулятора.
Управление многосекционным роботом-манипулятором является сложной задачей, в которой естественным образом выделяются стратегический, тактический и исполнительный уровни [3]. На стратегическом уровне выполняется планирование целевой конфигурации манипулятора, на тактическом уровне – синтез траектории перехода из текущего состояния манипулятора в целевое состояние, на исполнительном уровне – управление приводами секций манипулятора.
В работе рассматривается исполнительный уровень управления роботом-манипулятором типа «хобот», точнее говоря, рассматривается управление триподом, как секцией этого манипулятора.
Управление сложной динамической системой, которую представляет собой трипод, сопряжено с решением задачи идентификации этой системы [4]. Классические методы идентификации разделяются на методы непараметрической и параметрической идентификации.
При непараметрической идентификации чаще всего используют переходную характеристики системы, построенную на основе кривой разгона при ступенчатом изменении управления на входе системы. Затем эту характеристику аппроксимируют подходящим аналитическим выражением и на этой основе строят модельное дифференциальное уравнение. Одним из вариантов непараметрической идентификации являются частотные методы идентификации [5]. Параметрическая идентификация динамических систем основана на определении параметров передаточной функции, имеющей заданную структуру. В работе используется непараметрическая идентификация в среде модуля SystemIdentificationToolboxпрограммной системы MatLab[6].
Среди неклассических методов идентификации динамических систем в настоящее время наиболее популярной является идентификация с помощью многослойных нейронных сетей. В качестве нейросетевых модельных структур обычно используют следующие модификации линейных регрессионных моделей [7]: NNARX – нейросетевая авторегрессионная модель; NNARMAX– нейросетевая авторегрессионная модель скользящего среднего; NNSSIF –нейросетевая модель типа «обновления пространства состояний». Мы используем нейросетевую идентификацию на основе NNARX-модели, полученной средствами модуля NеuralNеtwоrkTооlbоxпрограммного комплекса Matlab [8].
При функционировании трипода в составе многосекционного робота-манипулятора типа «хобот», динамические характеристики платформы трипода, а также силы и моменты, действующие на нее, могут изменяться в очень широких пределах. Поэтому система автоматического управления (САУ) триподом должна быть адаптивной [5].
В работе сначала рассмотрены классические и нейросетевые неадаптивные системы управления. В качестве классической САУ рассмотрена двухконтурная система на основе ПИД-регуляторов, в качестве нейросетевой САУ – одноконтурная система на основе инверсной модели объекта управления [9]. Затем рассмотрены адаптивные САУ, построенные также на основе классических и нейросетевых систем управления.
Во всех случаях нейросетевые компоненты систем автоматического управления реализованы с использованием модуля NеuralNеtwоrkTооlbоx.
Эффективность рассматриваемых моделей идентификации и систем автоматического управления исследуется с помощью модуля MatLab/Simulink [10].
1. Постановка задачи
Механизм с параллельной кинематикой типа «трипод» состоит из неподвижного основания, подвижной платформы, трех штанг, каждая из которых состоит из двух полуштанг и исполнительного звена, а также из центрального неподвижного стержня ![]() – рисунок 1. Легко показать, что число подвижностей данного механизма
– рисунок 1. Легко показать, что число подвижностей данного механизма ![]() равно двум [2].
равно двум [2].
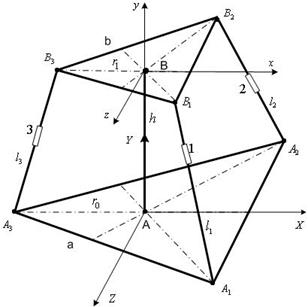
![]() - сферические шарниры;
- сферические шарниры; ![]() - шарниры Гука;
- шарниры Гука;
1,2,3 – исполнительные звенья
Рисунок 1 - Схема трипода с двумя степенями свободы
В качестве исполнительного звена (привода) рассмотрим двигатель постоянного тока в комбинации с винтовой передачей, осуществляющей преобразование вращательного движения вала электродвигателя в поступательное движение штанги.
Введем следующие обозначения: ![]() – суммарный момент инерции механической части электродвигателя, приведенный к валу электродвигателя;
– суммарный момент инерции механической части электродвигателя, приведенный к валу электродвигателя; ![]() – момент на валу электродвигателя;
– момент на валу электродвигателя; ![]() – момент трения;
– момент трения; ![]() – эквивалентная индуктивность якорной цепи;
– эквивалентная индуктивность якорной цепи; ![]() – эквивалентное сопротивление якорной цепи;
– эквивалентное сопротивление якорной цепи; ![]() – ток якоря;
– ток якоря; ![]() – ЭДС электродвигателя;
– ЭДС электродвигателя; ![]() – коэффициент электродвижущей силы;
– коэффициент электродвижущей силы; ![]() – угловая скорость вращения вала электродвигателя;
– угловая скорость вращения вала электродвигателя; ![]() – коэффициент вязкого трения;
– коэффициент вязкого трения; ![]() – коэффициент момента.
– коэффициент момента.
Во введенных обозначениях модель двигателя постоянного тока можно записать в виде системы обыкновенных дифференциальных уравнений [11]
 (1)
(1)
где ![]() ,
, ![]() ,
, ![]() .
.
Модель (1) реализована в системе MatLab/Simulinkв виде модели DCMachineблока SimPowerSystems[10].
Введем также следующие обозначения: ![]() – момент трения в резьбе;
– момент трения в резьбе; ![]() – осевая нагрузка на винтовую передачу;
– осевая нагрузка на винтовую передачу; ![]() - средний диаметр резьбы;
- средний диаметр резьбы; ![]() – угол подъема винтовой линии;
– угол подъема винтовой линии; ![]() – приведенный угол трения в передаче. В этих обозначениях модель винтовой передачи имеет вид [12]
– приведенный угол трения в передаче. В этих обозначениях модель винтовой передачи имеет вид [12]
![]() . (2)
. (2)
Кинематика трипода описывается системой алгебраических уравнений [2]
![]() ,
, ![]() , (3)
, (3)
где ![]() ,
, ![]() ,
, ![]() - координаты
- координаты ![]() шарнира
шарнира ![]() в инерциальной системе координат
в инерциальной системе координат ![]() соответственно;
соответственно; ![]() ,
, ![]() ,
, ![]() - те же координаты шарнира
- те же координаты шарнира ![]() ;
; ![]() - длины подвижных штанг;
- длины подвижных штанг; ![]() ,
, ![]() – углы Эйлера, определяющие положение платформы относительно основания:
– углы Эйлера, определяющие положение платформы относительно основания:
 .
.
Здесь ![]() ,
, ![]() ,
, ![]() - координаты шарнира
- координаты шарнира ![]() в системе координат
в системе координат ![]() ,
, ![]() - матрица перехода от системы координат
- матрица перехода от системы координат ![]() к системе координат
к системе координат ![]() .
.
Динамические уравнения трипода имеют вид системы обыкновенных дифференциальных уравнений [2]
 (4)
(4)
где ![]() – момент инерции платформы,
– момент инерции платформы,
 .
.
Здесь силы ![]() ,
, ![]() – усилия, развиваемые приводами штанг (активными полагаются первая и третья штанги).
– усилия, развиваемые приводами штанг (активными полагаются первая и третья штанги).
Необходимо найти такие законы изменения усилий ![]() ,
, ![]() , которые на решениях системы дифференциальных уравнений (4) обеспечивают заданные законы изменения фазовых переменных системы
, которые на решениях системы дифференциальных уравнений (4) обеспечивают заданные законы изменения фазовых переменных системы ![]() ,
, ![]() .
.
Поскольку непосредственное измерение указанных фазовых переменных технически сложно, будем пересчитывать по формуле (3) требуемые законы движения платформы ![]() в соответствующие законы изменения длин штанг
в соответствующие законы изменения длин штанг ![]() ,
, ![]() . Положим, что эти длины измеряются без статических и динамических погрешностей.
. Положим, что эти длины измеряются без статических и динамических погрешностей.
Таким образом, ставится следующая задача: построить систему автоматического управления, формирующую законы изменения управляющих напряжений для приводов штанг, которые обеспечивают заданные законы изменения их длин ![]() ,
, ![]() .
.
Положим, что материал изделия – сталь и введем следующие обозначения (рисунок 1):
![]() - радиус основания,
- радиус основания, ![]() м;
м;
![]() - радиус платформы,
- радиус платформы, ![]() м;
м;
![]() - высота механизма,
- высота механизма, ![]() м;
м;
![]() - толщина основания,
- толщина основания, ![]() м;
м;
![]() - толщина платформы,
- толщина платформы, ![]() м;
м;
![]() - внутренний радиус штанги,
- внутренний радиус штанги, ![]() м;
м;
![]() - внешний радиус штанги,
- внешний радиус штанги, ![]() м.
м.
Отметим, что указанные параметры трипода соответствуют параметрам промышленного робота FANUCF-200iB, построенного на основе гексапода [13].
2. Идентификация
2.1. Классическая идентификация. Положим, что длины двух штанг в рассматриваемой электромеханической системе фиксированы и управляемой является только одна штанга. Выполним непараметрическую идентификацию этой системы с использованием модуля MatLab/SystemIdentificationToolbox. Результатом идентификации являются значения коэффициентов ![]() передаточной функции этой системы
передаточной функции этой системы
![]() (5)
(5)
Переходная характеристика ![]() динамической системы (5) представлена на рисунке 2, который показывает практическое совпадение этой характеристики с характеристикой
динамической системы (5) представлена на рисунке 2, который показывает практическое совпадение этой характеристики с характеристикой ![]() динамической системы, описываемой уравнениями (1) – (4). Здесь и далее
динамической системы, описываемой уравнениями (1) – (4). Здесь и далее ![]() - ступенчатое единичное входное воздействие.
- ступенчатое единичное входное воздействие.

Рисунок 2 – Результаты классической идентификации: ступенчатое входное воздействие ![]()
Хорошо известно, что переходная характеристика полностью описывает только линейную стационарную систему. Поскольку рассматриваемая система не является ни линейной, ни стационарной, при входных воздействиях, отличных от единичного ступенчатого, модель может быть неадекватной. Данное утверждение иллюстрирует рисунок 3, на котором представлена реакция динамической системы (5) на гармоническое входное воздействии ![]() с единичной амплитудой и частой, равной 1
с единичной амплитудой и частой, равной 1 ![]() .
.
2.2. Нейросетевая идентификация рассматриваемой электромеханической системы выполнена с помощью NNARXмодели. Для построения обучающей выборки использовался ступенчатый единичный входной сигнал ![]() . Некоторые результаты идентификации представлены на рисунках 4 – 6. Здесь и далее приняты следующие обозначения:
. Некоторые результаты идентификации представлены на рисунках 4 – 6. Здесь и далее приняты следующие обозначения: ![]() - числа задержек входного и выходного сигналов соответственно;
- числа задержек входного и выходного сигналов соответственно; ![]() - число скрытых слоев сети;
- число скрытых слоев сети; ![]() - числа нейронов в
- числа нейронов в ![]() -ом скрытом слое;
-ом скрытом слое; ![]()

Рисунок 3 – Результаты классической идентификации: гармоническое входное воздействие ![]()
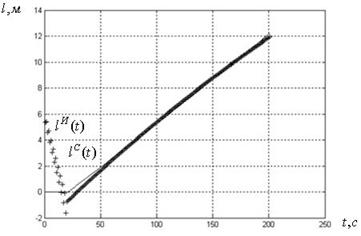
Рисунок 4 – Результаты NNARX-идентификации: ступенчатое входное воздействие ![]() ;
; ![]() ,
, ![]() ,
, ![]() ,
, ![]()
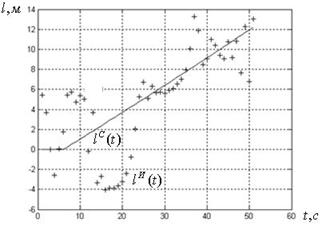
Рисунок 5 – Результаты NNARX-идентификации: ступенчатое входное воздействие![]() ;
; ![]() ,
, ![]() ,
, ![]() ,
, ![]()

Рисунок 6 – Результаты NNARX-идентификации: ступенчатое входное воздействие ![]() ;
; ![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]()
Рисунки 4 – 6 показывают, что NNARX-модель с параметрами ![]() ,
, ![]() ,
, ![]() ,
, ![]() обеспечивает хорошую аппроксимацию переходной характеристики системы.
обеспечивает хорошую аппроксимацию переходной характеристики системы.
Выходной сигнал NNARX-модели при гармоническом входном воздействии ![]() иллюстрирует рисунок 7. Сравнение рисунков 3, 7 показывает, что по сравнению с NNARX-идентификацией, классическая непараметрическая идентификация обеспечивает более высокую точность.
иллюстрирует рисунок 7. Сравнение рисунков 3, 7 показывает, что по сравнению с NNARX-идентификацией, классическая непараметрическая идентификация обеспечивает более высокую точность.
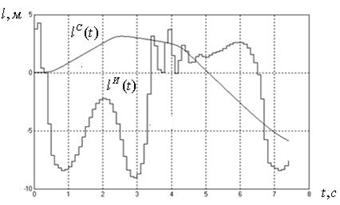
Рисунок 7 - Результаты NNARX-идентификации: гармоническое входное воздействие ![]() ;
; ![]() ,
, ![]() ,
, ![]() ,
, ![]()
3. Неадаптивные системы управления
3.1. Система управления на основе ПИД-регуляторов. Структура двухконтурной системы автоматического управления рассматриваемой электромеханической системы приведена на рисунке 8.

ЭД – электродвигатель; ВП – винтовая передача
Рисунок 8 - Структурная схема неадаптивной САУ на основе ПИД-регуляторов
Simulink-модель рассматриваемой САУ представлена на рисунке 9. Модель состоит из моделей электродвигателя, винтовой передачи, модели кинематики и динамики трипода, а также из моделей регуляторов. В качестве моделей ПИД-регуляторов использован специализированный блок РID cоntrоllеr, входящего в состав систеы MatLab/Simulink [10]. Поскольку система управления предполагается цифровой, моделируется насыщение цифроаналоговых преобразователей этой системы.
Полагается, что платформа трипода обладает центрально-осевой симметрией, тензор инерции которой определятся матрицей
 , (6)
, (6)
где компоненты имеют размерность ![]() .
.
Переходные процессы в САУ, полученные с помощью рассматриваемой Simulink-модели, представлены на рисунке 10.
Замечание 1. Здесь и далее в качестве возмущающего воздействия рассматривается момент ![]() Нм, приложенный в момент времени
Нм, приложенный в момент времени ![]() ск валу электродвигателя.
ск валу электродвигателя.
Замечание 2. Здесь и далее на аналогичных рисунках приведены также графики соответствующих входных ступенчатых воздействий ![]() ,
, ![]() .
.
Рисунок 10 показывает, что переходные процессы имеют большое перерегулирование. Кроме того, имеют место высокочастотные колебания длин штанг вблизи установившегося значения. Указанные эффекты объясняются наличием перекрестных связей в системе. Отметим трудность подбора коэффициентов ПИД-регуляторов рассматриваемой САУ.
Поведение САУ в ситуации, когда нарушена центрально-осевая симметрия платформы, иллюстрирует рисунок 11. Из рисунка видно, что данное обстоятельство приводит к возрастанию перерегулирования, переходные процессы становятся не регулярными.

Рисунок 9 - Simulink-модель неадаптивной САУ на основе ПИД-регуляторов
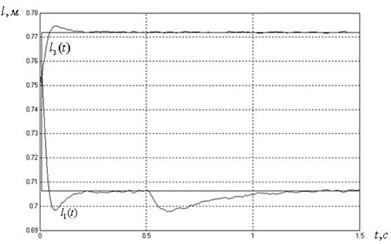
Рисунок 10 - Переходные процессы в неадаптивной САУ на основе ПИД-регуляторов: в момент времени ![]() с приложено внешнее возмущающее воздействие
с приложено внешнее возмущающее воздействие
Замечание 3. Здесь и далее, когда речь идет о нарушении центрально-осевой симметрии платформы, имеется в виду, что тензор инерции платформы гексапода задается не матрицей (6), а аналогичной несимметричной матрицей
 .
.

Рисунок 11 – Переходные процессы в неадаптивной САУ на основе ПИД-регуляторов: имеет место нарушение центрально-осевой симметрии платформы
3.2. Нейросетевая система управления. Структура нейросетевой системы управления одной из штанг трипода на основе его инверсной модели приведена на рисунке 12. Отметим, что здесь, в отличие от рассмотренной выше системы, САУ является одноконтурной.
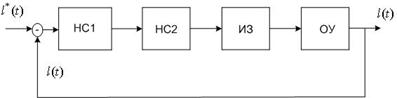
НС1, НС2 – нейронные сети ПИД-регулятора и инверсной модели соответственно;
ИЗ – исполнительное звено; ОУ – объект управления
Рисунок 12 – Структура нейросетевой неадаптивной системы управления
Инверсная модель представляет собой обратную модель объекта управления совместно с исполнительным звеном [9]. Эта модель получена при ступенчатых входных воздействиях различной амплитуды и имеет вид, представленный на рисунке 13. Соответствующая нейросетевая инверсная модель, полученная с помощью модуля NеuralNеtwоrkTооlbоx, представлена на том же рисунке. Рисунок демонстрирует высокую точность нейросетевой аппроксимации инверсной модели – ошибка аппроксимации не превышает 0,5%..

Рисунок 13 -Инверсная характеристика объекта управления и исполнительного звена ![]() (сплошная линия) и ее нейросетевая аппроксимация
(сплошная линия) и ее нейросетевая аппроксимация ![]() (крестики):
(крестики):
![]() ,
, ![]() ,
, ![]() ,
, ![]() ,
, ![]()
Simulink-модель нейросетевой неадаптивной системы управления приведена на рисунке 14. Здесь, как и в рассмотренной выше Simulink-модели классической САУ, ПИД-регулятор реализован с помощью блока РID cоntrоllеr. Отметим, что в данном случае настройка регулятора выполняется значительно проще, поскольку все нелинейности исполнительного звена и объекта управления компенсируются инверсной моделью. Переходные процессов в системе управления иллюстрирует рисунок 15.
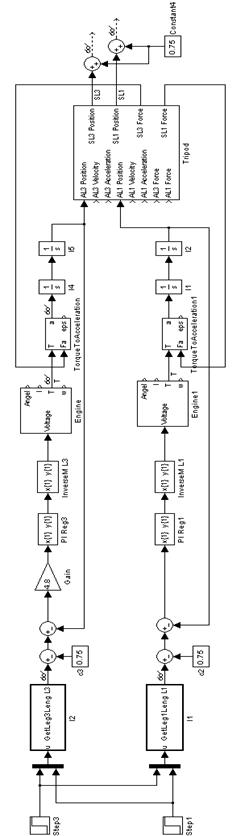
Рисунок 14 -Simulink-модель нейросетевой системы управления
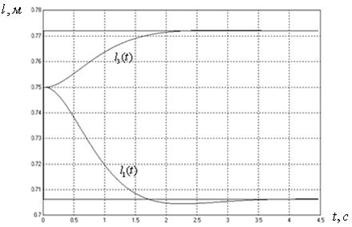
Рисунок 15 - Переходные процессы в нейросетевой неадаптивной системе управления
Рисунок 15 показывает, что нейросетевая неадаптивная система управления имеет существенно более низкое быстродействие по сравнению с системой на основе ПИД-регуляторов. С другой стороны, видно, что нейросетевая САУ обеспечивает существенно меньшую величину перерегулирования, а также отсутствие флюктуаций вблизи установившихся значений. Подчеркнем, что такая картина имеет место лишь при входных сигналах, “близких” к тестовым.
Эффективность нейросетевой неадаптивной САУ в ситуации, когда имеет место нарушение осевой симметрии платформы (7), иллюстрирует рисунок 16.

Рисунок 16 - Переходные процессы в нейросетевой неадаптивной системе управления: имеет место нарушение центрально-осевой симметрии платформы
4. Адаптивные системы управления
4.1. Адаптивная система управления на базе классических регуляторов. Обозначим ![]()
![]() ,
,![]() ,
,![]() вектор коэффициентов ПИД-регулятора, управляющего длиной штанги
вектор коэффициентов ПИД-регулятора, управляющего длиной штанги ![]() ;
; ![]() , где
, где ![]() ,
, ![]() ,
, ![]() - коэффициенты при пропорциональной, интегральной и дифференциальной составляющих регулятора соответственно.
- коэффициенты при пропорциональной, интегральной и дифференциальной составляющих регулятора соответственно.
Будем использовать в качестве ошибки управления величину ![]() – отклонение выхода объекта управления
– отклонение выхода объекта управления ![]() от выхода эталонной модели
от выхода эталонной модели ![]() :
:
![]() ;
; ![]() .
.
Таким образом, задача адаптивного управления длиной штанги ![]() состоит в подборе в процессе функционирования системы управления таких значений коэффициентов
состоит в подборе в процессе функционирования системы управления таких значений коэффициентов ![]() , которые обеспечивают минимальное значение ошибки
, которые обеспечивают минимальное значение ошибки ![]() .
.
Структура адаптивной системы управления представлена на рисунке 17. Система имеет три контура – адаптивный контур, а также контуры перемещения и скорости, идентичные соответствующим контурам неадаптивной САУ (рисунок 8).

ЭД – электродвигатель; ВП – винтовая передача
Рисунок 17 – Структура классической адаптивной системы управления
Адаптивный контур построен на основе линеаризованной математической модели трипода (эталонной модели) и ПИД-регулятора (рисунок 18).

Рисунок 18. Simulink-модель адаптивного контура
Выход адаптивного контура является эталонным, так что функционирование контуров перемещения и скорости имеет целью компенсировать ошибку отклонения выхода САУ от выхода эталонной модели. Отметим, что такая САУ позволяет отказаться от идентификации объекта управления в режиме реального времени.
Simulink-модель классической адаптивной системы управления на основе эталонной модели представлена на рисунке 19. Здесь блоки BaseL3, BaseL1 соответствуют эталонной модели трипода.
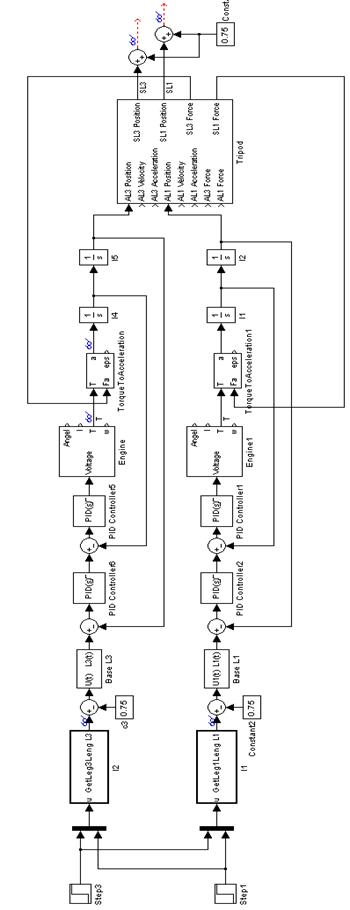
Рисунок 19 - Simulink-модель классической адаптивной системы управления
Переходные процессы в адаптивной системе управления, полученные с помощью данной Simulink-модели, представлены на рисунке 20. Сравнение этих переходных процессов с соответствующими процессами в неадаптивной САУ (рисунок 10) показывает, что в адаптивной САУ отсутствуют высокочастотные колебания. При том же времени переходного процесса, величина перерегулирования в адаптивной САУ значительно меньше (около 1%).
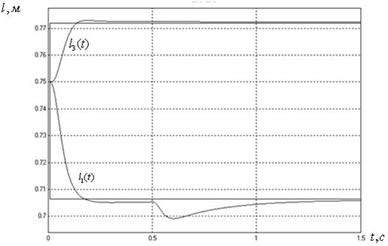
Рисунок 20 – Переходные процессы в классической адаптивной САУ: в момент времени ![]() с приложено внешнее возмущающее воздействие
с приложено внешнее возмущающее воздействие
Переходные процессы в классической адаптивной САУ в ситуации, когда платформа трипода не обладает центральной симметрией, иллюстрирует рисунок 21.
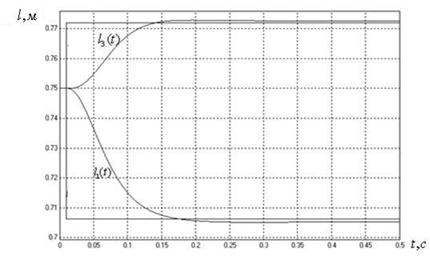
Рисунок 21 - Переходные процессы в адаптивной САУ: имеет место нарушение центрально-осевой симметрии платформы
Сравнение рисунка 21 с рисунком 11, на котором представлены аналогичные переходные процессы в неадаптивной САУ, показывает, что адаптивная САУ менее чувствительна к изменениям параметров объекта управления.
4.2. Нейросетевая адаптивная система управления. Структурная схема нейросетевой адаптивной САУ одной из штанг трипода представлена на рисунке 22. Здесь регулятор построен на основе нейросетевой инверсной модели объекта управления, а в качестве эталонной модели используется еще одна многослойная нейронная сеть. Задачи обучения обеих нейронных сетей по своей сути представляют собой задачи нейросетевой идентификации соответствующих динамических систем.

НС1, НС2 – нейронные сети эталонной и инверсной моделей соответственно;
ИЗ – исполнительное звено; ОУ – объект управления
Рисунок 22 – Структура нейросетевой адаптивной САУ
Simulink-модель указанной системы управления представлена на рисунке 23. Модель аналогична модели неадаптивной нейросетевой САУ (рисунок 12) с тем отличием, что эталонной модели трипода в данном случае соответствует нейронная сеть (блоки ModelL3, ModelL1). Нейронные сети представляют собой сети типа NARXсо следующими параметрами: ![]() ;
; ![]() ;
; ![]() ;
; ![]() ;
; ![]() .
.
Переходные процессы в нейросетевой САУ, полученные с помощью рассматриваемой Simulink-модели, представлены на рисунке 24. Рисунок показывает, что переходные процессы в нейросетевой адаптивной САУ не отличаются от таких же процессов в нейросетевой неадаптивной системе. Приложение внешней нагрузки приводит к появлению статической ошибки. Таким образом, нейросетевая адаптивная САУ не является робастной (в отличие от аналогичной неадаптивной системы).
Переходные процессы в нейросетевой адаптивной системе управления в ситуации, когда нарушена центрально-осевая симметрия платформы, приведены на рисунке 25. Рисунок показывает, что, по сравнению с аналогичной неадаптивной системой, статическая ошибка в этом случае не возникает.
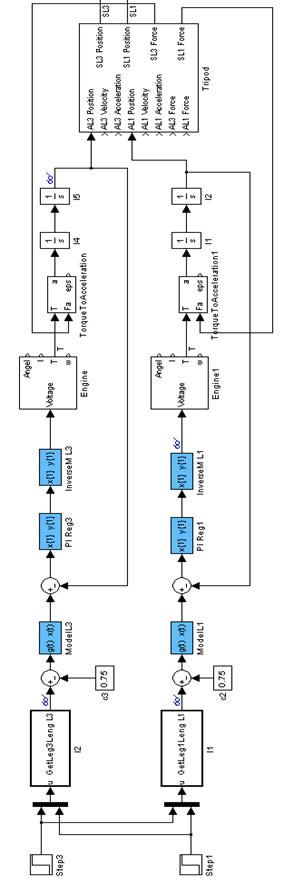
Рисунок 23 - Simulink-модель нейросетевой адаптивной системы управления

Рисунок 24 – Переходные процессы в нейросетевой адаптивной САУ: в момент времени ![]() с приложено внешнее возмущающее воздействие
с приложено внешнее возмущающее воздействие

Рисунок 25 - Переходные процессы в нейросетевой адаптивной САУ: имеет место нарушение центрально-осевой симметрии платформы
Заключение
Результаты работы показывают, что при построении системы автоматического управления многосекционным роботом-манипулятором типа хобот на исполнительном уровне, перспективным является использование нейросетевых адаптивных систем управления.
В развитии работы предполагается рассмотреть возможность повышения качества управления за счет использования нейро-нечетких САУ, исследовать эффективность САУ при учете стохастических ошибок в канале измерения, а также при учете стохастических внешних воздействиях на платформу механизма.
Авторы благодарят В.М. Буянкина и Ю.Т. Каганова за помощью в выполнении работы.
Работа выполнена в рамках аналитической ведомственной целевой программы «Развитие потенциала высшей школы (2009 – 2010 годы)», проект 2.1.2/1509.
Список литературы
1. Глазунов В.А., Колискор А.Ш., Крайнев А.Ф. Пространственные механизмы параллельной структуры.- М.: Наука, 1991.- 94 с.
2. Каганов Ю.Т., Карпенко А.П. Моделирование и оптимизация некоторых параллельных механизмов // Информационные технологии, Приложение, 2010, ╧5, с. 1-32.
3. Интеллектуальные системы автоматического управления / Под ред. И.М. Макарова, В.М. Лохина.- М.: Физматлит, 2001.- 576 с.
4. Гроп Д. Методы идентификации систем.– М.: Изд-во «Мир», 1979.– 294 с.
5. Александров А. Г. Оптимальные и адаптивные системы. М.: Высшая школа 2002.- 263 с.
6. Никульчев Е.В. Идентификация систем в Matlab 6 [Электронный ресурс]. (http://www.tspu.tula.ru/ivt/old_site/lcopy/Matlab_RU/systemidentific/book1/index.asp).
7. Пупков К.А., Егупов Н.Д. Методы робастного, нейронечеткого и адаптивного управления.– М.: Изд-во: МГТУ им. Н.Э. Баумана, 2002.– 254 с.
8. Маслобоев Ю.П. Введение в Neural Network Toolbox [Электронный ресурс]. (http://www.nsu.ru/matlab/MatLab_RU/neuralnetwork/book1/index.asp).
9. Терехов В.А., Ефимов Д.В., Тюкин И.Ю. Нейросетевые системы управления.– М.: Высшая школа, 2002.– 183 с.
10. Черных И.В. Simulink: Инструмент моделирования динамических систем [Электронный ресурс]. (http://matlab.exponenta.ru/simulink/book1/index.php).
11. Онищенко Г.Б. Электрический привод: Учебник для вузов - М.: РАСХН. 2003.-320.
12. Решетов Д.Н. Детали машин: Учебник для вузов.- М.: Машиностроение, 1989.- 496.
13. Merlet J.P.. Parallel Robots. Solid mechanics and its applications.- Kluwer Academic Publishers, V. 74, 2000.
Публикации с ключевыми словами: нейросетевая идентификация
Публикации со словами: нейросетевая идентификация
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||