scientific edition of Bauman MSTU
SCIENCE & EDUCATION
Bauman Moscow State Technical University. El № FS 77 - 48211. ISSN 1994-0408
# 06, June 2009
1. INTRODUCTION
Collecting of models of machines and mechanisms has begun in the Middle Ages. In the beginning it was an entertainment of royal persons and rich people which collected various mechanical wonders: tiny hours, musical automatic machines, clockwork toys, scientific devices and tools. Then, during the industrial revolution there was an increasing demand of technically competent experts capable to design, make and maintain difficult machines and mechanisms. This higher technical education was aiming to teach and train engineers and technicians having strong background in theory of machines and theory of mechanisms. Thus, these basic disciplines were established at Polytechnic schools and Universities. Moreover, collections began to be formed in scientific communities (academies) and universities. For example, Robert Hook was engaged in creation of devices and models which accompanied scientific reports of members of English Academy. A big Royal collection of mechanisms was made by August Bethencourt even if it was lost due to bombardment of the French artillery, [1-6].
Recently, there has been an increasing interest to collection of mechanisms. At the beginning main interest has been from historical point of view since most of the old models of mechanisms are very important for studying and keeping memory of the history of technology and its evolution though the time. Moreover, some old models of mechanisms has been seen also as handcraft pieces having high artistic significance for museums. Models of mechanisms still have a fundamental role for training and teaching mechanism design from modern point of view and for technically investigating the evolution of technology through the time. Therefore, in this paper we discuss the history of mechanism models and their use for studying and teaching purposes by referring to experiences at Bauman Moscow State Technical University and at LARM in Cassino.
2. COLLECTIONS OF MECHANISM MODELS
Robert Willis was one of the first who began to apply models of mechanisms in teaching. Only few mechanisms from that collection have remained up to now [1]. In Karlsruhe a big collection of mechanisms has been created by Ferdinand Redtenbacher. Models of this collection were made in a individual piece at workshops of the technical institute in Karlsruhe. Drawings of these models and their description are given in the book [2]. After death of Redtenbacher the workshops were closed [3]. Only few exemplars from Redtenbacher's collection remained, as reported in [4]. Franc Reuleaux, Redtenbacher’s pupil, created the greatest collection of models which was intended for teaching engineering science. Its collection contained more than 800 models. Some of these models were improved variants of mechanisms of Redtenbacher, but the majority was developed by Reuleaux. For demonstration of models at the Berlin technical school a special stand with water-column’s machines was created for keeping models in motion. Around 1870 Reuleaux transferred the rights to manufacture some of his models in the collection to Gustav Voight who began to produce these models serially [5].
In France models for educational purposes were made by the father and son Clair. Pierre Clair began by manufacturing the equipment for cultivation of silkworms, and he manufactured scientific tools and devices. As quality of these devices was high it was requested to make models of mechanisms for Conservatory of Arts and handcrafts. His son Alexander Clair in 1855 inherited the manufacturing activity of the father. It was considerably expanded and transformed in a serial production; in particular it began to mould the bases of models from pig-iron. Quality of models decreased a little, but their price decreased also. Alexander Clair's models have remained at many universities and museums, in BMSTU collection there are eight of such models. In Germany the batch production of training Reuleaux’s models was carried out in the end of 19 centuries by F. Schröder [6].
The process of forming of mechanism collections continued in the 20th century, expecially during in its first half. Technical education was enlarged and improved. The number engineering institutes and universities was increased. All of these were equipped with models of mechanisms, which were used both for teaching and laboratory work. A significant collection of mechanisms was established at Cornell University (USA) [4], Technical Universities in Aachen, Dresden, Karlsrushe, Ilmenau (Germany), Technical University in Turino (Italy), Universities in Taiwan, Portugal and others [7-12]. Cornell University saved the largest from the existing collections of models by Reuleaux-Voight. In Russia the significant collections were created in Moscow University and in row engineering institute of Moscow and Petersburg (polytechnic, aircraft, energy, tool-instrumental, railway, optometrist-mechanical and others). In medium 60’s, with appearance of new educational disciplines (electronics, computing machinery, automation, robotics and others), courses of Theory of mechanisms and machines started to decline, departments of TMM started to ally with departments of materials, theoretical mechanics, and others. In these conditions it was difficult to save the collections of mechanisms. One part of the collections of mechanisms was sent in technical museums, other part was simply thrown away. Today in Russian Universities only BMSTU, Stankin, and Transport saved their collections.
2.1 BAUMAN COLLECTION OF MECHANISM MODELS
In Russia the formation of the higher technical education has begun later than in Europe. Therefore it was created by using the European experience. Young Russian scientists, who were going to teach mechanic and engineering science, went on learning at universities in France, Germany and Switzerland. This school passed to A. Yershov, F. Orlov, N. Mertsalov and others. All of them gave great value to applied mechanics office, since they considered it as necessary component of system of education for providing high quality of teaching of engineering disciplines. Office of Applied mechanics and collection of mechanisms in IMEI (the predecessor of BMSTU) was created by I. Balashev in 1840’s. A considerable contribution to collection development was brought in the period from 1845 to 1869 by director of IMEI A. Yershov. Under his care pupils made about hundred models of mechanisms as shown for example in Fig.1. Some models of mechanisms ware based on the models of Radtenbacher. Drawings of many of these models were published in [2]. However, Yershov's models are not exactly copies of Redtenbacher’s models. Comparison shows, that between them there are constructive differences (Fig. 2).
Today the collection of the department TMM of BMSTU is the largest collection of mechanism model. It counts more than 500 models (see Appendix), from which more one third are history models (Reuleaux-Voght, Redtenbacher-Yershov, Сlair, Schröder), the others can be divided into three groups: models of the school L. Reshetov, models of the school V. Gavrilenko and scholastic models. The models of the scientific plan present unique mechanisms, executed on inventions or on result of scientific researches. They portioned between two scientific schools existed on department TMM: a school of Reshetov (study of the structure rational mechanism) and a school of Gavrilenko (gearing mechanisms). The third section - scholastic models, models standard mechanism: linkages, toothings, and cams, which was designed and manufactured by Soyuzvuzpribor (the organization for designed and manufactured scholastic devices for high school) or was manufactured on the department TMM for lecture and laboratory work.
3. HOW TO TEACH WITH MECHANISM MODELS AT BAUMAN
At present, the role of mechanism is changed, since it is changed the scholastic course on designing mechanism. However, models mechanism are used today not only for demonstration of the transformation of the motion on lections on TMM or for undertaking experiment in laboratory. In fact, these models themselves become subject of the scientific study as valuable monument of the history of the techology. In the Imperial Moscow Technical School (IMTS) arose and developed the "Russian school" of preparation mechanical engineer, which has got spreading in many technical university of the world. The teaching system was developed by a group of the teachers whose head was D. Sovetkin. This teaching system required the combination of theory with practice. Therefore, kits of scholastic models play a key role in this teaching system. For example, such a kit on turning processing, contained a magnified model of the instrument and different examples of the details, which demonstrate the possibility of the turning processing. Similar kits where created at IMTS for several different type of applications. They were demonstrated on several industrial exhibitions, where they were highly appreciated by specialists and were rewarded with diplomas and medals [13]. On Fig.3 is shown a photo of D. Sovetkin and photo of the cabinet of educational workshops. 
Models of Office of Applied Mechanics were used at lecturing, conducting of seminars and laboratory works, served as experimental validation of the performance of design works. There are records of lectures on Lithographic courses given by professors Orlov, Zernov and Mertsalov [14,15,16] in which drawings and circuit designs of models of a collection are saved. Photos of three models from BMSTU collection are given in Mertsalov’s textbook [17]. Further in many TMM textbooks drawings or photos of models were used. Especially there are a lot of photos of models of mechanisms in the first publications of the textbook of I. Artobolevsky [18] (Fig. 4). At the century celebration of BMSTU (1933) it was released a movie in which Professor L. Smirnov was giving lectures accompanied by demonstration of models of mechanisms. Fig.5 shows Professor L. Smirnov during a lecture with a model demonstration.
In the late 40’s laboratory works were added at the department of TMM of BMSTU. The part of laboratory works was carried out by using models of mechanisms. The models of Reuleuax-Voight from section S (rectilinear-directing mechanisms) were used in laboratory works, which were devoted to the structural analysis of lever mechanisms. For laboratory work on metric synthesis of four-links lever mechanisms models the hinge four-links and a crank-slider of mechanisms with variables long links have been designed and manufactured. At the kinematics research of cams there were used models, which can register the diagram of moving of a pusher written as an angle of turn of the shaft of a cam. Photos of models that were applied in laboratory works are shown on Fig. 6.
In the ‘60s in the USSR research and production were combined in the education program. Thus, Soyuzvuzpribor was engaged in designing and manufacturing of the educational equipment for the higher school. H developed a complete set of educational laboratory-scale devices and a complete set of demonstration models on ТММ. The majority of technical institutes in the USSR were equipped by these models. Further every decade these complete sets were updated. The photos of some samples from complete sets of these models are show in Fig. 7.
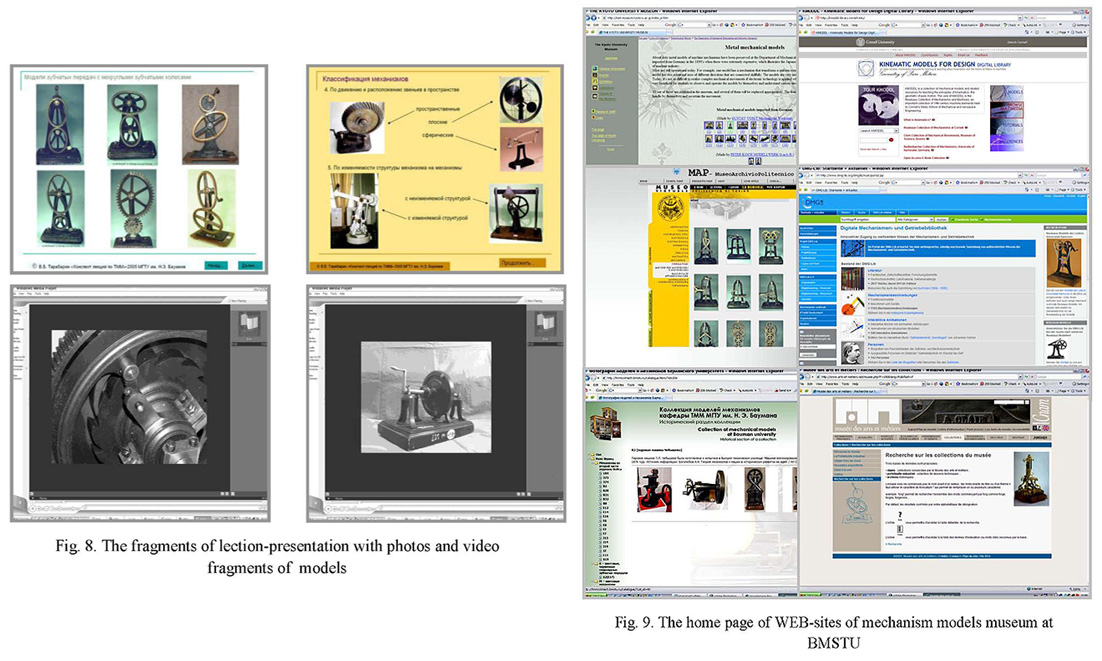
At the initial stage of formation of an engineering education the number of students studying applied mechanics was small. At this stage efforts were spent for building a specialized auditory near the office of mechanisms. This auditory was intended for lecturing with demonstration of models. In this auditory there was a long table near a blackboard for placing and demonstrating the models. This approach was similar to what Reuleuax did at the Berlin technical school by creating special stands for demonstration of models by using the water-column’s machine [3]. In the 60’s electronics, computing machinery and other new disciplines began to push a decline of disciplines connected with mechanics. Moreover, the increase of number of students did not allow anymore to give one specialized auditory. To transfer bulky and heavy models from an office to auditory it was inconvenient and sometimes impossible. Therefore, demonstration of models in lectures was cancelled. The modern computer's techniques possess wide multimedia possibilities. More and more university auditory is equipped with the multimedia equipments. Lectures are accompanied by computer presentations. In them photos of models of mechanisms and real machines, video movies of their operation, 3D animations illustrating principles of their work are widely applied. In a Fig. 8 fragments of lectures-presentations in which photos of models of mechanisms and video movies showing these models in movement are given. 
Development of Internet is giving the possibility to have a new form of demonstration of mechanisms collections on web sites or virtual museums. Such kind of websites is under development in several places such as at Cornell University in the USA [4], museum of mechanism models Technical Universities in Taiwan [7], Conservatory of arts and handcrafts in Paris (France) [8], Technical Universities in Germany [9], Technical University in Kyoto (Japan) [10], Technical University in Torino (Italy) [11], Department of TMM of BMSTU [12] and others. Sites contain the full museum description of models, their photos and video fragments, computer animated three dimensional models. Creation of these sites is supervised by the IFToMM Permanent Commission for the History of Mechanism and Machine Science under the responsibility of Professor F. Moon. These websites are intended for scientists who are engaged in history engineering sciences, and for students studying ТММ. In a Fig. 9 the main page of some of the listed sites is presented.
BMSTU has recently made the decision to recover the room for the models of mechanisms in the auditorium that will take the name of Cabinet of mechanisms. In a near future it will be equipped with full multimedia equipment. This will allow to use both real models and their photography (including large photographs of the most important nodes and elements), video movies, computer's animations. The Cabinet of mechanisms will get the status of a branch of the BMSTU museum. In the Cabinet of mechanisms it is planned not only conduct lectures and practices on theories of mechanism and machines, history of technology, technical English, but also carry out scientific and restoration work.
Students are supposed to work on the settling up of the Cabinet of mechanisms and its related webpage by helping in restoring, identifying, and describing the existing models. These works are a good school for students, since they will learn practical skills on mechanical engineering, history of technology and related fields.
4. HOW TO TEACH WITH MECHANISM MODELS AT LARM IN CASSINO
Teaching on Robotics and Mechatronics at LARM in Cassino is supported by both experimental and research activities with models of mechanisms. These models of mechanisms are often developed within master or PhD thesis and have fundamental significance for attracting the interest of students to mechanism theory. Moreover, they are widely used at LARM for teaching mechanism design by referring to its modern applications in the wider field of mechatronics. Therefore, models of mechanisms are often used for research purposes. Some illustrative examples of mechanism models that have been designed and built at LARM are reported in Fig. 10,11,12. Details on teaching and research aspects as based on the above-mentioned mechanism models can be found, for example, in [21-28].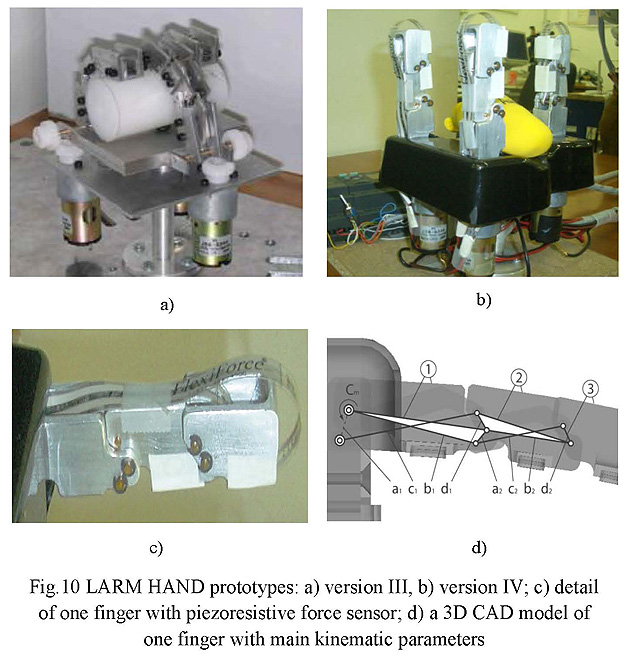
Figure 10 shows built prototypes of LARM Hand. This robotic hand is composed of three fingers whose design is aimed for an anthropomorphic behaviour. In particular, a human-like grasping is obtained by each finger with 1 d.o.f. (degree of freedom) motion by using a suitable mechanism whose design has been obtained through cross four-bar linkages to be fitted in the finger body as shown in Fig.10d). The design compactness is useful to achieve a suitable stiffness at grasp too. The current low-cost solution can be completed with force sensors on phalanx surfaces (Fig.10c) and palm area that have been designed with a suitable surface configurations. Consequently the grasp can be regulated through a simple control using those force sensor signals and an industrial small PLC for an easy programming. The LARM Hand can be used as a grasping end-effector in robots and automatic systems, and even it has a potential feasibility as biomechanical prosthesis, once suitable adjustments are made. As shown in Fig.10 LARM Hand is a mechatronic system which is obtained as integration of mechanical parts (the fingers), measurement equipments (force sensor and monitoring software), control unit (PLC and its programming). Research activity has been carried out to design suitable mechanisms for anthropomorphic operation of the fingers with 1 dof only, to use and program a low-cost PLC, to operate firm grasp through low-cost sensors and suitable control scheme, [23,24].
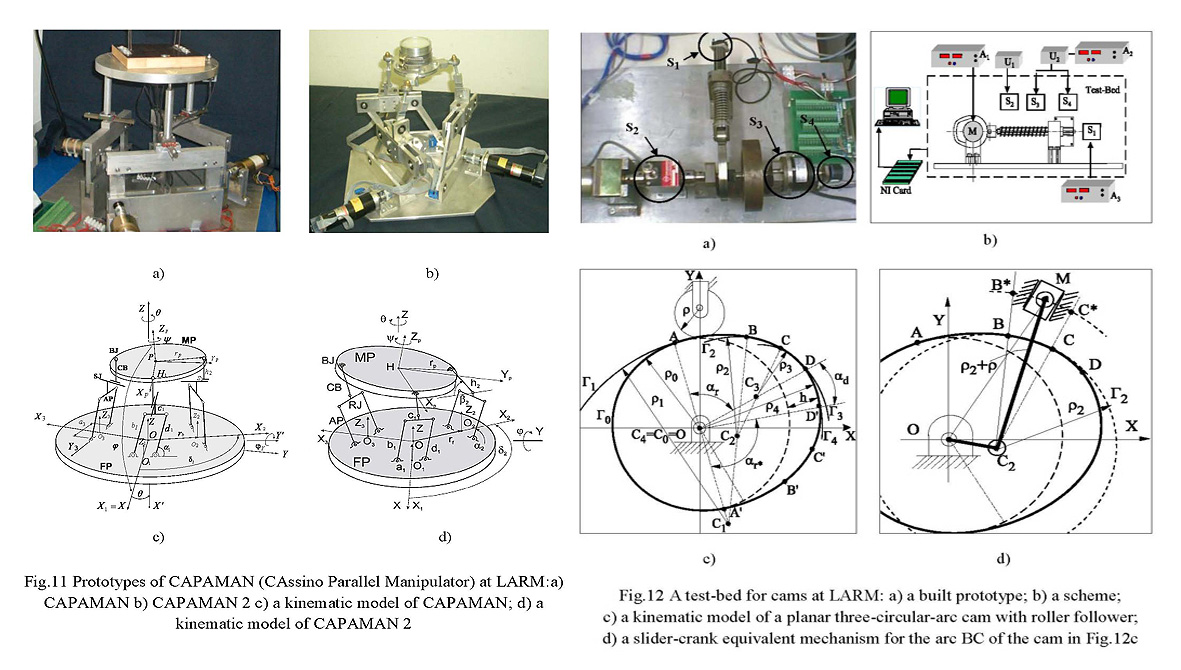
Figure 11 shows built prototypes and kinematic schemes CaPaMan (Cassino Parallel Manipulator) versions 1 and 2. CaPaMan is composed of a movable plate MP that is connected to a fixed plate FP by means of three leg mechanisms. Each leg mechanism is composed of an articulated parallelogram AP whose coupler carries a prismatic joint SJ for CaPaMan or a revolute joint RJ for CaPaMan 2, a connecting bar CB which transmits the motion from AP to MP through SJ, and a spherical joint BJ, which is installed on MP. Each parallelogram AP lays in a plane that is rotated of p/3 with respect to the neighbour one so that the spherical joints BJ lie along the vertices of an equilateral triangle geometry to give symmetry properties to the mechanism. CaPaMan has only three active degrees of freedom. Therefore, this architecture shows important advantages regarding simple mechanical design and easy kinematic formulation. CaPaMan has been developed also by means of several master thesis works and has been successfully investigated as earthquake simulator. Similarly, CaPaMan 2 has been used both for teaching and research purposes and several applications have been tested even in the field of robot assisted surgery, [25,26].
Figure 12 shows a low-cost easy-operation test-bed for cams that has been designed and settled up at LARM. It is composed of commercial measuring sensors and equipment, with the aim of not complicate the test-bed design and operation. In particular, the operation of this test-bed is achieved by using LabView software with a National Instruments 6024E Acquisition Card. One accelerometer has been installed on the follower for monitoring and measuring the acceleration and the motion law of the follower. In addition, dynamic properties can be experimentally evaluated by using a dynamic torsionmeter, which has been installed on the motor shaft. One encoder and one tachometer have been installed on the camshaft. The encoder gives the possibility to monitor the position of the camshaft, whereas the tachometer is used to monitor and measure the velocity of the camshaft. This test-bed is widely used at LARM for teaching the operation of cam systems to students. Moreover, several master thesis have been carried for settling up and operating this test-bed. It has been used also for investigating and validating the design and operation of cams as reported for example in [27,28].
All the prototypes in Fig.10 to 12 can be seen as models of mechanisms that are integrated with actuators, sensors, control systems within a mechatronic device. Thus, these prototypes provide to the students practical (teaching and research) experience on mechanism design as applied to modern devices with a multidisciplinary approach.
5. CONCLUSION
In the middle of 19th century the models of mechanisms took an important place in teaching of engineer disciplines. Due to multimedia computer classes and Internet network their part increased. Creating of actual learning materials (electronic textbooks and presentations, virtual laboratory works and museums) with using of models of machines is one of the most perspective directions in developing of engineer’s education. The development of web-sites devoted to the monuments of science history and technology is one of the main directions of technical museums activity. They make valuable (previously not easily accessible) monuments of culture open to students, scientists and other internet users. Authors trust, that their work in the nearest future will be completed, and all of interested people will be able to see mechanic models from BMSTU collection.
ACKNOWLEDGMENTS
This work has been partially developed during a period of study at LARM in Cassino with support of MIUR project of 2008 Italy-Russia Program. Authors would like thank Prof. Marco Ceccarelli from LARM, University of Cassino, and Prof. Alexander Golovin from Bauman Moscow State Technical University for the help and suggestions in elaborating this work. Authors also wish to thank students from RK6, RK9 и RK10 groups, who collaborated in web-sites development and prepared the working materials.
REFERENCES
1. Moon F.C. Robert Willis and Franc Reuleuax: Pioneers in Theory of Machines. Notes and Records Royal Soc. London. 2003, pp. 209-230.
2. Redtenbacher F., Die Bewegungs-Mechanismen: Darstellung und Beschreibung eines Theiles der Maschinen-Modell-Sammlung der polytechnischen Schule in Carlsruhe / von F. Redtenbacher. Heidelberg: F. Bassermann, - 1866.
3. Orlov F.E. Diary of the foreign trip 1869-1872, Moscow, printing office of G. Lissner and A. Geshel, 1898.
4. Kinematic Models for Design. Digital library. Cornell University College of Engineering. Available onl-line at http://kmoddl.library.cornell.edu/
5. Voigt G., Kinematic Models After Reuleaux. Catalog, Berlin.—1907.
6. Polytechnisehes Arbeits—Institut. J.Schröder. Actien-gesellschaft. Darmstadt. Fabrik f. Unterrichts—Modelle, Zeichen—u. Mal-Geräthe. Illustrationen von Unterrichts—Modellen und Apparaten. Extra-Ausgabe zur Preisliste für Unterrichts—Modelle. September 1904. Buchdruckerei von H. Uhde. Darmstadt.
7. Tiwan's Antique Mechanisms Teaching Models. Digital Museum (www.acmf.org.tw/model)
8. The musée des arts et métiers Available onl-line at http://www.arts-et-metiers.net/
9. The Digital Mechanism and Gear Library (short DMG-Lib). Technische Universität Ilmenau, Technische Universität Dresden and RWTHAachen. Available onl-line at http://www.dmg-lib.org/dmglib/main/portal.jsp
10. The Kyoto University Museum. Available onl-line at http://www.museum.kyoto-u.ac.jp/
11. Polytecnico di Torino. Museo virtuale. Meccanica. Cinematismi. Available onl-line at http://www2.polito.it/strutture/cemed/001/museovirtuale.htm
12. Collection of mechanical models at Bauman University. Historical section of a collection Available onl-line at http://tmmcolmech.bmstu.ru/
13. Della Voss V., Description of the educational collections appointed for studying of mechanical arts in workshops IMTS.-Moscow, 1873.
14. Orlov F., Applied Mechanics / Part 1 – Theory of Mechanisms (224 pp., 232 ill.); Part 2 – Theory of Machines (344 pp., 247 iIll.), M.: Lithographic edition of lectures, 1885/86. (in Russian)
15. Zernov D., Applied Mechanics / Part 1 – Theory of Mechanisms (432 pp., ill.); Part 2 – Theory of Machines (232 pp., ill.), Lithographic edition of lectures// M.: Edition of IMTS, 1895/96. (in Russian)
16. Mertsalov N., Mechanism’s Kinematics / Lithographic course of lectures, read in IMTS. Processed and published by M. Phelinsky. – Moscow, 1914. – 610 pp. (in Russian)
17. Mertsalov N., Mechanism’s Dynamics / Lithographic course of lectures, read in IMTS. Processed and published by M. Phelinsky. – Moscow, 1914. – 610 pp. (in Russian)
18. Artobolevskiy I. Theory of machines and mechanisms. Gostehizdat, M.&L. 1949.—762 pp. (in Russian)
19. Tarabarin V., Tarabarina Z. The electronic a learning-methodical complex at the course the Theory of machines and mechanisms. Proceeding of the China-Russian symposium on problems of development and use of the information technology in engineering education, HPU, China, Harbin, on November, 3rd 2007 - 139 pp.
20. Ceccarelli M., "Mechanism schemes in Teaching: A Historical Overview", ASME Journal of Mechanical Design, 1998, Vol.120, pp.533-541.
21. Ceccarelli M., “Low-Cost Robots for Research and Teaching Activity”, IEEE Automation & Robotics Magazine, Vol.10, n.3, pp.37-45, September 2003.
22. Ceccarelli M., Carbone G., “Mechanics in Mechatronics”, The International UBT-Conference Modern Enterprise: Management – Engineering – Computing, Prishtinë, 2008.
23. Carbone G., Ceccarelli M., “Experimental Tests on Feasible Operation of a Finger Mechanism in the LARM Hand”, International Journal Mechanics Based Design of Structures and Machines, vol.36, pp.1-13, 2008.
24. Carbone G., Ceccarelli M., “Design of LARM Hand: problems and solution”, IEEE-TTTC International Conference on Automation, Quality&Testing, Robotics AQTR 2008, Cluj-Napoca, pp.298-303, 2008.
25. Mendes Carvalho J.C., Ceccarelli M., "Numerical Simulation and Experimental Validation of Dynamic Characteristics of CAPAMAN (Cassino Parallel Manipulator)", Proceedings of COBEM2001, Uberlandia, 2001, Robotics and Control, Vol.15, pp.117-125.
26. Carbone G., Marini G., Ceccarelli M., "Experimental Validation and Tests of Operation Characteristics of a Parallel-Serial Manipulator", 14th CISM-IFToMM Symposium on Theory and Practice of Robots and Manipulators Ro.Man.Sy.'2002, Udine, 2002, Preprints CD, pp. 331-338.
27. Carbone G., Lanni C., Ceccarelli M., López-Cajún C.S., “Dynamic Effects of Curvature Change in the Profile of Two Circular-Arc Cams”, V Congreso Iberoamericano de Ingegneria Mecanica CIDIM2001, Mérida, pp.1247-1252, 2001.
28. Carbone G., Lanni C., Ceccarelli M., López-Cajún C., “Numerical and Experimental Simulations of Dynamic Operators of Cams”, Problems of Mechanics International Scientific Journal, vol.28, n.3, pp.7-20, 2007.
APPENDIX: THE SECTIONS OF COLLECTION OF DEPARTMENT TMM AT BMSTU
╧
| The name of section of collection | Collection, author, manufacturer | Data of manufactured of models | Numbers of models in section |
1. | Models of Yershov-Redtenbacher | А.Yershov, F. Redtenbacher, pupils of МРУЗ | 1861-1869 | 41 |
2. | Models of Reuleaux-Voght | F.Orlov, F.Reuleaux, G. Voight (Germany) | 1875-1890 | 67 |
3. | Models of A.Clair | F.Orlov, F.Reuleaux, A. Clair (France) | 1875-1890 | 8 |
4. | Models of I. Schreder
| F.Orlov,F.Reuleaux, I. Schreder (Germany) | 1861-1869 | 1 |
5. | Models of L.Reshetov and his pupils | L. Reshetov, L. Reshetov and his pupils, Educational masters of department TMM | 1930-1980 | More then 150 |
6. | Models of V.Gavrilenko and his pupils
| V.Gavrilenko, his pupils, Educational masters of department TMM |
1945-1975 |
More then 40 |
7. | Models of SoiuzVuzPribor | L. Reshetov, Design department SoiuzVuzPribor and its experimental plants | 1960-1970 1975-1980 | Nearby 10 Nearby 30 |
8. | Models of RosUchPribor
| K. Frolov, Gagarin’s department of RosUchPribor | 1985-1995 | Nearby 20 |
9. | Models—presents | L.Reshetov Competitors, post-graduate students, listeners of faculty of improvement of professional skill of teachers |
1930-2005 |
Nearby 10
|
10. | Models of cogwheels, instruments, etc. | L.Reshetov, - | 1930-1980 | Nearby 40 |
11. | Models, not gone into in the sections set forth above | L.Reshetov, - | 1930-1980 | Nearby 50 |
Publications with keywords: Models of mechanisms, Teaching mechanism design, History of mechanics
Publications with words: Models of mechanisms, Teaching mechanism design, History of mechanics
See also:
Thematic rubrics:




| Authors |
| Press-releases |
| Library |
| Conferences |
| About Project |
| Phone: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Phone: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||