научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 11, ноябрь 2013
DOI: 10.7463/1113.0623966
УДК 62-52
Россия, МГТУ им. Н.Э. Баумана
Введение
Согласно концепции оптимизации электрогидравлического следящего привода (ЭГСП) с дроссельным регулированием, изложенной в [1], в данной статье рассмотрен первый уровень оптимизации (Ур. 1) ЭГСП, исходя из предположения, что примененный в приводе электрогидравлический усилитель (ЭГУ) представлен пропорциональным звеном. Выполнению этого условия при втором уровне (Ур. 2) оптимизации будет посвящена следующая статья. Принятому здесь разделению ЭГСП на две оптимизируемых подсистемы соответствует широко применяемой блочной структуре ЭГСП (рис. 1).

Рис. 1. Блочная структура ЭГСП: БУ – блок управления, ЭМП – электромеханический преобразователь, ГУ – предварительная ступень усиления, ЗР – золотниковый распределитель (основная ступень усиления), МОС – механическая обратная связь по положению золотника, ИМ – исполнительный механизм (гидроцилиндр), ДОС – датчик основной обратной связи, uупр – сигнал управления, yнагр – координата управляемого объекта, создающего нагрузку на выходное звено ЭГСП
В литературе описано большое количество методов многокритериальной оптимизации [2, 3, 4, 5] [2] [3] [4] [5], каждый из которых имеет свои преимущества и недостатки. В связи с этим одним из этапов решения задачи многокритериальной оптимизации является выбор и обоснование метода.
Выбор параметров ЭГСП основан на том, что конструктор, имея техническое задание, предварительно проектирует его принципиальную схему. Пример такой схемы представлен на рис. 2. Основные конструктивные решения составляющих ЭГСП устройств широко распространены в приводах авиационных систем, станков с программным управлением, робототехнических систем и других современных систем управления [6, 7].
После второго уровня оптимизации, будет обращено внимание на обеспечение в структуре и характеристиках ЭГУ возможности применения методов корректирования динамики всего ЭГСП [7, 8].

Рис. 2. Принципиальная схема ЭГСП с ЭГУ типа «сопло-заслонка» с механической обратной связью по положению золотника (СЗ с МОС)
Процедура выбора параметров подсистемы Ур. 1 состоит из следующих этапов.
1) Составление математической модели привода и определение вектора варьируемых параметров.
2) Выбор критериев для минимизации отклонений характеристик проектируемого ЭГСП с различным сочетанием параметров от технического задания. Набор критериев можно выразить в виде вектора целевых функций ![]() и ограничений в виде
и ограничений в виде ![]() .
.
3) Как показывает практика [7], при условии, что частота пропускания ЭГУ ωЭГУ (частота, при которой фазочастотная характеристика ЭГУ пересекает уровень -90°)в 3…5 раз больше собственной частоты исполнительного механизма ω0 , можно рассматривать подсистему Ур. 2 в составе всего ЭГСП, как пропорциональное звено с коэффициентом передачи

Здесь Qmax – расход рабочей жидкости (РЖ) через окна золотникового распределителя при максимальном токе управления iy.max в обмотках ЭМП и равенстве нулю перепада давлений между полостями исполнительного механизма. Однако следует заметить, что подсистема Ур. 2, при наличии в ней колебательного звена с большой постоянной времени, может создавать существенное, по сравнению с допускаемым техническим заданием, фазовое запаздывание. Таким образом, если одним из основных требований к ЭГСП является требования к значениям фазового запаздывания, замена подсистемы Ур. 2 пропорциональным звеном может оказаться некорректной.
В процессе оптимизации подсистемы Ур. 1 необходимо определить конструктивные параметры ЭГСП по критериям Fi (x), i=1…l, l <m, рассматривая подсистему Ур. 1 с подсистемой Ур. 2, представленной пропорциональным звеном.
1 Математическая модель ЭГСП и определение вектора варьируемых параметров
На этапе предварительного синтеза параметров ЭГСП для оценки его устойчивости и быстродействия в целом можно использовать линеаризованную математическую модель [9]. Однако для более подробного исследования характеристик ЭГСП с целью выявления условий, при которых может изменяться качественная природа решений уравнений, описывающих работу спроектированного привода (возникать катастрофы), необходимо затем применить нелинейную математическую модель [10]. Динамические характеристики реального ЭГСП обычно отличаются от характеристик его линейной модели вследствие:
– сухого трения в золотниковом распределителе и исполнительном механизме, или в устройствах, нагружающих выходное звено исполнительного механизма;
– вида функции, описывающей расходно-перепадную характеристику золотникового распределителя, с разрывом в нуле.
Используемые далее переменные состояния ЭГСП и их соответствие составляющим ЭГСП устройствам показаны на рис. 3.
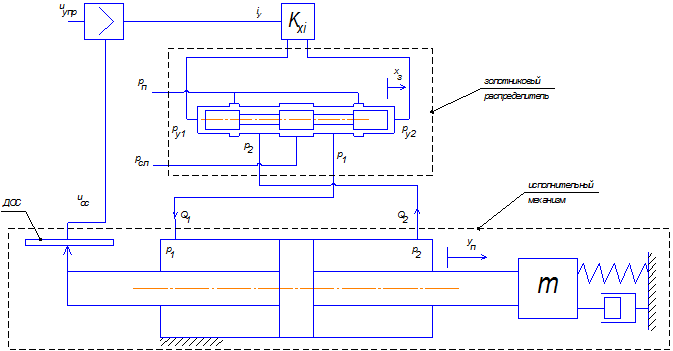
Рис. 3. Схема подсистемы Ур. 1
Уравнение, описывающее электронную часть ЭГСП имеет вид
![]()
где iy – ток управления вобмотках ЭМП, uупр – сигнал управления, uос – сигнал от датчика обратной связи, kiu – коэффициент передачи электронного усилителя.
Уравнение, описывающее подсистему Ур. 2 при принятом ранее допущении, можно записать в виде
![]()
где ![]() – расход РЖ через окна золотникового распределителя при подаче тока управления iy в случае равенства нулю перепада давлений между полостями исполнительного механизма.
– расход РЖ через окна золотникового распределителя при подаче тока управления iy в случае равенства нулю перепада давлений между полостями исполнительного механизма.
Уравнения, описывающее подсистему Ур. 2, можно также записать в виде
![]()
![]()
где  – коэффициент передачи ЭГУ по ходу золотника, Qmax – максимальный расход через ЭГУ при максимальном открытии окон золотникового распределителя xз.max.
– коэффициент передачи ЭГУ по ходу золотника, Qmax – максимальный расход через ЭГУ при максимальном открытии окон золотникового распределителя xз.max.
Расход РЖ, протекающей через окно золотникового распределителя, определяется известной из гидравлики формулой [7]
![]()
Где ![]() – полученная экспериментально зависимость проводимости окна золотникового распределителя от плотности РЖ ρ, температуры РЖ t, суммарной ширины окон золотникового распределителя bок, перемещения золотника xз, направления потока жидкости
– полученная экспериментально зависимость проводимости окна золотникового распределителя от плотности РЖ ρ, температуры РЖ t, суммарной ширины окон золотникового распределителя bок, перемещения золотника xз, направления потока жидкости ![]() ;
; ![]() – относительное противодавление, рвх и рвых – давления на входе и выходе окна золотникового распределителя;
– относительное противодавление, рвх и рвых – давления на входе и выходе окна золотникового распределителя; ![]() – удельная проводимость окна золотникового распределителя.
– удельная проводимость окна золотникового распределителя.
Уравнения, описывающие расход РЖ через окна золотникового распределителя, необходимо дополнить уравнениями, основанными на гипотезе неразрывности течения сжимаемой РЖ:
Здесь S п – площадь поршня гидроцилиндра (исполнительного механизма), y п – перемещение поршня гидроцилиндра, V 1 иV 2– объемы РЖ в каждой из полостей гидроцилиндра с присоединенными к ним гидролиниями, соединяющими золотниковый распределитель с гидроцилиндром, B – модуль объемной упругости РЖ, точкой над переменными в уравнении обозначена производная по времени.
При этом значения давлений в полостях исполнительного механизма ограничены неравенствами
![]()
Уравнение движения поршня гидроцилиндра с учетом нагрузки, действующей на его шток, имеет вид [9]
![]()
где сн – жесткость позиционной нагрузки, ![]() – трение в нагрузке на штоке и в уплотнениях, состоящее из сухого трения величиной Rтр и вязкого трения с коэффициентом вязкого трения kтр, mн – масса нагрузки, перемещаемой штоком гидроцилиндра.
– трение в нагрузке на штоке и в уплотнениях, состоящее из сухого трения величиной Rтр и вязкого трения с коэффициентом вязкого трения kтр, mн – масса нагрузки, перемещаемой штоком гидроцилиндра.
В соответствии с записанными выше уравнениями, варьируемыми параметрами для подсистемы Ур. 1 являются сила трения ![]() , коэффициент передачи электронного усилителя kiu, величина зоны нечувствительности ЭГУ. Также к варьируемым параметрам стоит отнести изменение передаточного отношения механизма, соединяющего выходное звено привода с управляемым объектом, в
, коэффициент передачи электронного усилителя kiu, величина зоны нечувствительности ЭГУ. Также к варьируемым параметрам стоит отнести изменение передаточного отношения механизма, соединяющего выходное звено привода с управляемым объектом, в ![]() раз.
раз.
2 Выбор критериев
Оптимизация силовой части ЭГСП осуществляется по следующим критериям [1].
1) Целевые функции, характеризующие соотношение мощности и массы исполнительного механизма [11]. Для ЭГСП с поступательным движением выходного звена такой целевой функцией может быть безразмерное соотношение

Где m – масса ЭГСП; v в – скорость поступательного движения выходного звена ЭГСП, P в – максимальная сила, действующая на выходное звено ЭГСП, ymax – максимальное перемещение выходного звена.
В техническом задании требования к предельной механической характеристике ЭГСП определяются из соображений обеспечения необходимых законов управления управляемым объектом и могут предъявляться в следующем виде.
а) Требования к максимальной развиваемой силе на выходном звене ЭГСП P в и требования к максимальной скорости движения выходного звена ЭГСП v в при отсутствии силы на выходном звене.
При изменении передаточного отношения механизма, соединяющего выходное звено ЭГСП с управляемым объектом, в k раз требования к ЭГСП изменятся следующим образом: ![]() ,
, ![]() ,
, ![]() .
.
Также для выбранной конструктивной схемы ЭГСП можно в первом приближении определить из соображений обеспечения прочности зависимость [12]
m = m(k, Rтр, рп).
На основе изложенного выше, можно записать целевую функцию для нового проектного варианта ЭГСП, как

где  – постоянная величина.
– постоянная величина.
б) Требования к скорости движения выходного звена ЭГСП v p при заданной силе на выходном звене ЭГСП P p и ограничение на значение максимальной развиваемой силы на выходном звене ЭГСП P в.
Аналогично изложенному выше, можно получить целевую функцию в виде
однако в отношении  постоянной величиной остается ymax, а остальные величины можно записать, как vв(Pp, Sп, pп), Рв=Рв(Рр, Sп, pп).
постоянной величиной остается ymax, а остальные величины можно записать, как vв(Pp, Sп, pп), Рв=Рв(Рр, Sп, pп).
2) Динамические показатели, выбираемые в соответствии с техническим заданием на ЭГСП. Например, для ЭГСП, используемых в авиационных системах управления, они представлены в виде [7]:
– требований на величину резонансного пика на логарифмической частотной характеристике Lрез (как правило, не более 1…2 Дб), и частоту пропускания ωпп при логарифмическом значении амплитуд -3…-6 Дб для замкнутого контура привода;
– требований к фазочастотным характеристикам ЭГСП в виде ограничений на максимальный фазовый сдвиг перемещения выходного звена относительно входного сигнала в заданном диапазоне частот;
– кроме того, при необходимости демпфирования колебаний управляемого объекта в случае отсутствия специальных демпфирующих устройств могут предъявляться требования к динамической жесткости ЭГСП [8]. Динамическая жесткость определяется, как комплексное отношение возмущающей силы, действующей на выходное звено ЭГСП, к перемещению выходного звена, вызванному этим возмущением. Для обеспечения демпфирования управляемого объекта ЭГСП должен во всем диапазоне частот возмущающей силы иметь фазочастотную характеристику динамической жесткости максимально близкую к +90° и значение динамической жесткости не меньшее определенного в техническом задании.
В случае невозможности выполнения требований к динамическим характеристикам путем варьирования конструктивных параметров, целесообразно вводить в структуру привода корректирующие устройства [7].
Поскольку работу ЭГСП описывает нелинейная математическая модель, при подаче управляющего гармонического сигнала, выходной сигнал имеет форму, отличную от гармонической, а частотные характеристики ЭГСП зависят от амплитуды входного сигнала. Частотные характеристики в таком случае определяют на основе первой гармоники разложения выходного сигнала в ряд Фурье для входных гармонических сигналов с различной амплитудой.
Расчет частотных характеристик ЭГСП целесообразно производить в следующем порядке.
а) Руководствуясь техническим заданием, выбрать:
– диапазон рабочих частот ωmin ωmax, Гц;
– шаг по частотной оси, представленной в логарифмическом масштабе Δωlog (шаг по частоте Δω(ω)=(10∙ Δωlog-1)∙ω);
– набор амплитуд входного сигнала ![]() .
.
б) Для каждого сочетания амплитуды и частоты входного гармонического сигнала произвести расчет выходного сигнала.
в) Определить амплитуду и фазу первой гармоники разложения выходного сигнала в ряд Фурье (далее «первая гармоника»). Для сокращения времени вычислений процесс расчета выходного сигнала необходимо останавливать по условию одновременной малости первых и вторых производных амплитуды и фазы первой гармоники. В связи с чувствительностью результатов численного определения производных к дискретности процесса расчета, рационально производную заменить звеном с передаточной функцией

где dTmax – максимальный шаг интегрирования, 
3) Энергетические характеристики.
Критерием, характеризующим энергетическую эффективность, может быть количество энергии, используемое для регулирования.
Также, с точки зрения обеспечения оптимальных энергетических характеристик, следует отметить случай, когда требования к предельной механической характеристике ЭГСП заданы скоростью выходного звена ЭГСП v p при требуемой нагрузке P p, а также минимальной Pв.min и максимальной Pв.max развиваемой ЭГСП силы. При таком сочетании требований технического задания можно получить чрезмерно большой потребляемый расход РЖ в режиме холостого хода. Для его уменьшения следует повышать развиваемую силу. В случае Pв > Pв.max в структуру ЭГСП для ограничения развиваемой силы необходимо вводить нелинейную обратную связь по перепаду давления в гидродвигателе, либо применять на выходном звене гидропружину [12].
3 Решение многокритериальной задачи
Как показано в ряде работ, для решения задач многокритериальной оптимизации (МКО) ЭГСП целесообразно применять метод ЛПпоиска [3, 6] [6], [3]или генетические алгоритмы (ГА) [13]. ГА универсальны и просты в применении. Многокритериальные модификации ГА [4] позволяют получать более полный фронт Парето по сравнению с методом ЛПпоиска при меньшем участии конструктора.
В качестве целевых функций при решении задачи МКО целесообразно выбирать два-три основных критерия из вышеперечисленных, остальные же следует отнести к ограничениям, накладываемых техническим заданием.
Для выбора оптимального проектного варианта в задаче МКО, как правило, необходимо сравнивать векторные критерии, элементы которых имеют различные размерности. В связи с этим, необходимо нормировать множество, составляющее полученный в результате применения выбранного алгоритма МКО фронт Парето. Если ни один из элементов фронта Парето не принимает нулевого значения, целесообразно нормировать пространство критериев следующим образом:
Здесь f imin – минимальное значение критерия fi, fi(x) – значение критерия fi при сочетании конструктивных параметров x, n – число критериев.
В качестве примера рассмотрим задачу оптимизации составной части ЭГСП – электрогидравлического агрегата, включающего в себя ЭГУ, ИМ и ДОС (рис. 1), со следующими параметрами:
развиваемая сила ![]() ,
,
максимальное перемещение выходного звена ![]() ,
,
максимальная скорость выходного звена ![]() ,
,
запаздывание по фазе в разомкнутом контуре ЭГСП не более ![]() относительно управляющего сигнала амплитудой, равной половине от максимального, на частотах, соответственно,
относительно управляющего сигнала амплитудой, равной половине от максимального, на частотах, соответственно, ![]() .
.
Диапазон изменения варьируемых параметров и полученное оптимальное сочетание параметров ЭГУ приведены в табл. 1.
Таблица 1
Параметр, единица измерения | Минимальное значение параметра | Максимальное значение параметра | Оптимальное сочетание параметров |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
В качестве критериев выбраны:
1) целевая функция, характеризующая отношение массы к мощности, в виде

2) целевая функция, характеризующая близость фазочастотной характеристики к оси абсцисс, в виде
При помощи многокритериальной модификации ГА получен аппроксимированный фронт Парето, затем все элементы фронта Парето нормированы. Результат оптимизации представлен на рис. 4.
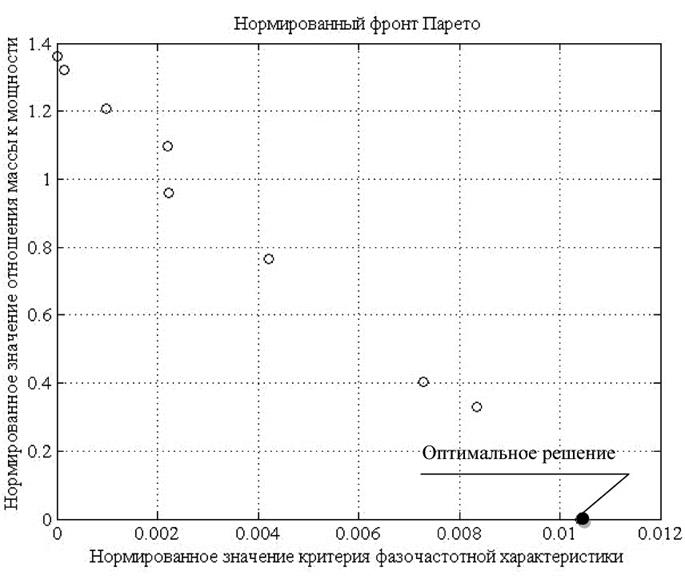
Рис. 4. Нормированный фронт Парето
Видно, что в результате варьирования конструктивных параметров не удалось существенно улучшить фазочастотную характеристику проектируемого ЭГСП. Таким образом, оптимальным проектным вариантом является сочетание параметров, при котором принимает минимальное значение целевая функция, характеризующая отношение массы к мощности.
Заключение.
В полученном решении изменение передаточного отношения механизма, соединяющего выходное звено ЭГСП с управляемым объектом в kраз, и коэффициент передачи электронного усилителя kiuможно воплотить в реальной конструкции при отсутствии дополнительных неформализуемых ограничений (ограничения по элементной базе, ограничения связанные с компоновкой ЭГСП и системы, в которую он входит и т.п.).
Полученное значение давления питания p п можно реализовать, если разработчик ЭГСП проектирует и систему, в которую входит гидропривод. В таком случае оптимизацию необходимо проводить для всей системы. Иначе, полученное значение давления питания имеет рекомендательный характер для разработчика системы.
Сухое трение R тр и коэффициент вязкого трения k тр зависят от конструкции уплотнительных узлов и типа нагрузки на выходном звене. Данные параметры чаще всего имеют некоторую степень неопределенности и сложно реализовать их при проектировании и производстве. Таким образом, при отсутствии отдельных требований к величине трения стоит отнести полученные значения параметров R тр и k тр к рекомендательным.
После определения действительной величины нагрузки трения, действующей на выходное звено ЭГСП, и выбора величины давления питания целесообразно повторно провести оптимизацию параметров ЭГСП.
Рассмотренный в статье первый уровень оптимизации ЭГСП с дроссельным регулированием соответствует концепции оптимизации, изложенной в [1]. Научная новизна заключается в постановке и решении задачи многокритериальной оптимизации ЭГСП.
Список литературы
1. Замараев Д.С., Попов Д.Н. Концепция оптимизации электрогидравлического следящего привода с дроссельным регулированием // Наука и образование. МГТУ им. Н.Э. Баумана. Электрон. журн. 2013. № 6. DOI: 10.7463/0613.0569281
2. Карпенко А.П., Федорук В.Г. Аппроксимация функции предпочтений лица, принимающего решения, в задаче многокритериальной оптимизации. 3. Методы на основе нейронных сетей и нечеткой логики // Наука и образование. МГТУ им. Н.Э. Баумана. Электрон. журн. 2008. № 4. Режим доступа: http://technomag.bmstu.ru/doc/86335.html (дата обращения 26.09.2013).
3. Статников Р.Б., Соболь И.М. Выбор оптимальных параметров в задачах со многими критериями. 2-е изд., перераб. и доп. М.: Дрофа, 2006. 175 c.
4. Deb Kalyanmoy. Multi-Objective Optimization Using Evolutionary Algorithms. John Wiley & Sons, 2001. 518 p.
5. Arora J.S., Marler R.T. Survey of multi-objective optimization methods for engineering // Struct Multidisc Optim. 2004. № 26. P. 369-395.
6. Боровин Г.К., Попов Д.Н. Многокритериальная оптимизация гидросистем: учеб. пособие. М.: Изд-во МГТУ им. Н.Э. Баумана, 2007. 94 c.
7. Попов Д.Н., Асташев В.К., Густомясов А.Н. и др. Машиностроение: энциклопедия. В 40 т. Т. IV-2 : Электропривод. Гидро- и виброприводы. Кн. 2: Гидро- и виброприводы / под ред. В.К. Асташева, Д.Н. Попова. М.: Машиностроение, 2012. 303 c.
8. Редько П.Г., Ермаков С.А., Константинов С.В. Электрогидравлические рулевые приводы систем управления полетом маневренных самолетов. М.: "Янус-К", 2006. 316 c.
9. Попов Д.Н. Механика гидро- и пневмоприводов: учебник для машиностроительных вузов. 2-е изд. М.: Изд-во МГТУ им. Н.Э. Баумана, 2002. 320 c.
10. Гилмор Р. Прикладная теория катастроф. 2-е изд. М.: Мир, 1984. 285 c.
11. Попов Д.Н. Оценка эффективности и оптимальное проектирование гидроприводов // Вестник машиностроения. 1986. № 9. С. 20-23.
12. Оболенский Ю.Г., Ермаков С.А., Сухоруков Р.В. Введение в проектирование систем авиационных рулевых приводов. М.: Изд-во ГУП г. Москвы "Окружная газета ЮЗАО", 2011. 344 c.
13. Andersson J., Krus P., Wallace D. Multi-objective optimization of hydraulic actuation systems // Proceedings of the 2000 ASME Design Automation Conference (DETC’00) (Baltimore, MD, 10-13 September 2000). DAC-14512. Режим доступа: http://cadlab.mit.edu/publications/00-andersson-asme-dt/dontindex/00-andersson.pdf
Публикации с ключевыми словами: гидропривод дроссельный, оптимизация многокритериальная, алгоритм генетический, привод электрогидравлический следящий
Публикации со словами: гидропривод дроссельный, оптимизация многокритериальная, алгоритм генетический, привод электрогидравлический следящий
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||