научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 07, июль 2013
DOI: 10.7463/0713.0567714
УДК 62-522.2
Россия, МГТУ им. Н.Э. Баумана
ОАО «КАМАЗ»
Введение
Создание эффективных средств защиты от внешних динамических воздействий всегда являлось одной из важных проблем современной техники. Особенно остро вопросы обеспечения допустимых уровней колебаний ставятся при создании современных транспортных средств: летательных аппаратов, автомобилей, судов. С возрастанием скоростей движения этих средств интенсивность динамических воздействий обычно увеличивается, поэтому развитие транспортных средств сопровождается непрерывным повышением требований к системам виброзащиты.
Тягово-скоростные свойства многоосных колесных машин (МКМ) оказывают основное влияние на формирование максимальных и средних скоростей движения. Другие эксплуатационные свойства, в частности, плавность хода, выступают в качестве факторов, ограничивающих дальнейшее повышение эксплуатационных скоростей. В настоящее время конструктивные решения узлов и агрегатов МКМ, влияющие на показатели устойчивости, управляемости, тормозных свойств, поворачиваемости, проходимости достигли высокой степени совершенства. Тем не менее, несмотря на достигнутые успехи, система первичного подрессоривания сдерживает дальнейший рост скоростей движения [1, 2].
Повышение средних скоростей возможно путём сбалансированного увеличения удельной мощности двигателя и совершенствования системы подвески. Хорошо известно, что увеличение удельной мощности двигателя и изменение передаточных чисел не приводят к увеличению средних скоростей движения. Сложившаяся ситуация объясняется тем, что водитель ограничивает скорость движения в тех случаях, когда виброускорения начинают превышать границу вибробезопасности или утомляемости [3].
Вместе с тем, МКМ имеют значительные величины удельной мощности силовых установок, обусловленные необходимостью получения высоких показателей по разгону, проходимости и поворачиваемости. Поэтому совершенствование системы первичного подрессоривания МКМ, проводимое с целью увеличения средних скоростей их движения, является актуальной задачей.
Важность совершенствования подвески повышается, если учесть значительную стоимость и особенности специальных грузов, перевозимых многоосными автомобилями, а также необходимость высоких средних скоростей движения по дорогам и местности.
У современных МКМ качество системы подрессоривания обеспечивается путем согласованного выбора характеристик упругих и демпфирующих элементов. При этом разработчики стремятся достичь максимального демпфирования колебаний корпуса и, в то же время, наименьшего возмущения, передаваемого на подрессоренную часть машины [4]. Возможности увеличения демпфирования в резонансных режимах корпуса на обратном ходе колес ограничены условием их «зависания». Таким образом, увеличение уровня демпфирования, при ограниченных динамических ходах, необходимое, главным образом именно в «резонансных» режимах движения, достигается увеличением сопротивления (уровня демпфирования) амортизаторов на прямом ходе колес. В «зарезонансных» режимах движения это приводит к увеличению вертикальных ускорений корпуса. Следовательно, обеспечение плавности хода при движении многоосной машины с разными скоростями по местности со случайными неровностями, определяет противоречивые требования к элементам подвески.
Также известно, что колебательная система «корпус колесной машины – подвеска» находится под воздействием как силового, так и кинематического возмущений. Силовое возмущение непосредственно передается на корпус машины, и определяется тяговыми и тормозными силами на грунте, а также силами от системы вооружения в режимах наведения и стрельбы. Для уменьшения уровня передаваемых возмущений и стабилизации корпуса в этом случае требуется, как можно более «жесткая» подвеска. Кинематическое возмущение передается от неровностей трассы на корпус через систему подрессоривания, и поэтому для улучшения плавности хода в этом случае требуется «мягкая» подвеска с целью уменьшения передаваемого возмущения. То есть требования к элементам подвески при кинематическом и силовом возмущении также противоречивы.
Разрешить эти противоречия, имеющие важное значение для автомобилестроения в целом, можно введением в подвеску системы, которая обеспечивает изменение сил (в достаточно широком диапазоне) действующих на корпус машины как функцию условий и режимов движения.
Традиционные неуправляемые системы подрессоривания не позволяют получить приемлемые показатели плавности хода для всего многообразия условий эксплуатации многоосных колесных машин, а также не позволяют разрешить противоречий между требованиями по плавности хода и повышению параметров профильной проходимости МКМ [5, 6]. С этой задачей способны справиться только управляемые системы подрессоривания, эффективное применение которых зависит от алгоритмического и программного обеспечения, построенных на законах прикладной механики и отражающих физическую суть процессов и взаимосвязей элементов колесных машин.
Целью данной работы является повышение плавности хода многоосных колесных машин путем адаптивного управления упругодемпфирующими элементами системы подрессоривания.
При разработке закона управления системой подрессоривания МКМ будем пользоваться классификационной терминологией, предложенной в работе [1]. Под принципом непрерывного управления будем понимать такой процесс регулирования, когда должно быть реализовано точное значение управляющего приращения усилия в подвеске, которое рассчитано алгоритмом. Под полуактивной системой подрессоривания будем понимать систему, где энергия управления затрачивается не на создание активной восстанавливающей силы, а на управление исполнительными устройствами, в качестве которых могут выступать регулируемые дроссели, регулируемые напорные, обратные, запорные клапаны. Усилие же, требуемое для осуществления гашения колебаний по заложенному алгоритму, создается в пассивных элементах подвески (упругих иди демпфирующих).
Среди полуактивных управляемых систем подрессоривания конструктивно интересны амортизаторы, которые содержат дисперсные ферромагнетики (суспензии с твердой ферромагнитной фазой) – магнитореологические демпферы (МРД).
В работе [7] отмечены преимущества МРД в роли управляемых демпферов:
- малое сопротивление при отключении и достаточно большое значение сопротивления при максимальном демпфировании;
- возможность непрерывного и бесступенчатого изменения демпфирования;
- возможность изменять сопротивления демпфирования до 1000 раз в секунду при достаточно малом потреблении энергии;
- отсутствие клапанов в гидравлической системе, что значительно повышает ресурс устройства.
Для управления магнитореологическими демпферами рассмотрим два наиболее известных алгоритма: «инерциальный демпфер» [8] и алгоритм противодействия продольно-угловым колебаниям корпуса [4]. Последний разработан проф. А.А. Дмитриевым для быстроходных гусеничных машин.
1. Разработка непрерывного закона управления полуактивного системой подрессоривания на основе принципа «инерциальный демпфер» с нечеткой настройкой параметров
Принцип работы инерциального демпфера можно изложить следующим образом [8]. Чтобы энергия, связанная с работой восстанавливающей силы Ру в подвеске, рассеивалась, должно выполняться условие
![]()
где ![]() - скорость прогиба подвески.
- скорость прогиба подвески.
Восстанавливающая сила ![]() (где
(где ![]() - абсолютная вертикальная скорость точки корпуса в месте крепления подвески; b – коэффициент пропорциональности), создаваемая системой управления, должна изменять знак виброскорости
- абсолютная вертикальная скорость точки корпуса в месте крепления подвески; b – коэффициент пропорциональности), создаваемая системой управления, должна изменять знак виброскорости ![]() в соответствии с вынуждающим воздействием q(t), так как восстанавливающая сила не может вводить энергию в систему, а распределяет энергию колебаний путем соответствующей ее модуляции:
в соответствии с вынуждающим воздействием q(t), так как восстанавливающая сила не может вводить энергию в систему, а распределяет энергию колебаний путем соответствующей ее модуляции:
при при | (1) |
Применительно к управлению магнитореологическим демпфированием условия (1) можно записать следующим образом:
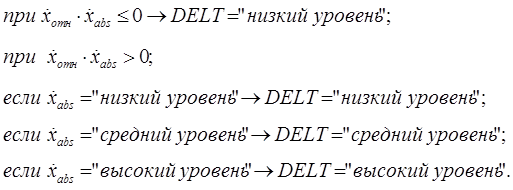
при ![]()
при ![]() минимальный уровень демпфирования.
минимальный уровень демпфирования.
Принцип управления магнитореологическим демпфером пояснен на рис. 1.
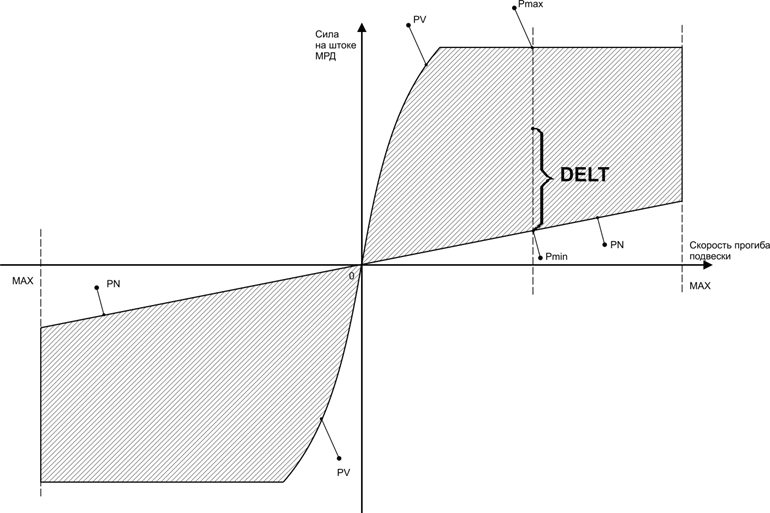
Рис. 1. Область допустимых значений управляющих воздействий для МРД:
PV – уровень максимального демпфирования в МРД; PN – уровень минимального демпфирования в МРД; Pmin – текущий минимально возможный уровень демпфирования в МРД; Pmax – текущий максимально возможный уровень демпфирования в МРД; DELT – управляющее воздействие
Значения Pmin и Pmax обоснованы в работе [9]. Управляющее воздействие DELT является приращением к минимальному текущему уровню демпфирования Pmin. Таким образом, текущая демпфирующая сила PD в МРД рассчитывается по формуле
![]()
Для определения величины управляющего воздействия DELT воспользуемся методами нечеткой логики. Введем соответствующую выходную лингвистическую переменную DELT. В качестве входной лингвистической переменной используем абсолютное значение вертикальной скорости точки крепления подвески к корпусу![]() . Введем следующие термы для обеих лингвистических переменных: «высокий уровень»; «средний уровень»; «низкий уровень». Функции принадлежности для входной и выходной лингвистических переменных показаны на рис. 2 и 3 соответственно.
. Введем следующие термы для обеих лингвистических переменных: «высокий уровень»; «средний уровень»; «низкий уровень». Функции принадлежности для входной и выходной лингвистических переменных показаны на рис. 2 и 3 соответственно.
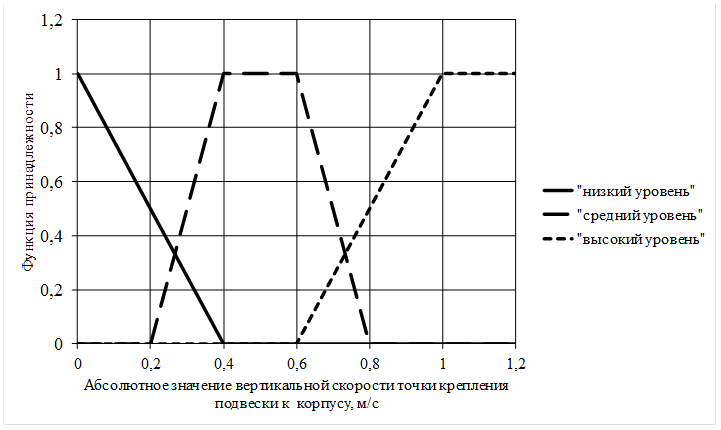
Рис. 2. Функции принадлежности входной переменной «Абсолютное значение вертикальной скорости точки крепления подвески к корпусу»
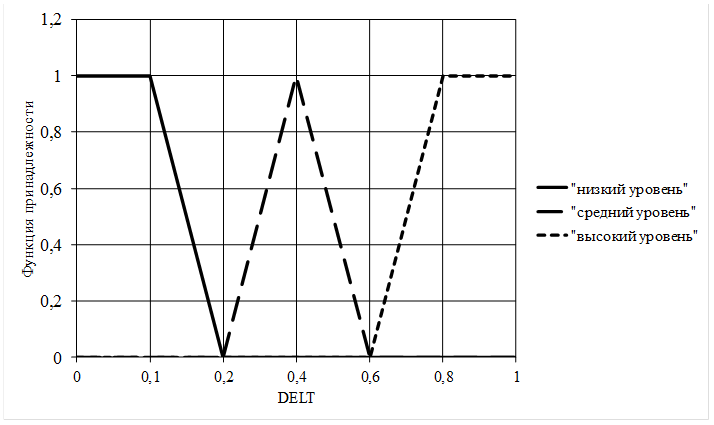
Рис. 3. Функции принадлежности выходной переменной «DELT»
Полный набор нечетких правил выглядит следующим образом.
Будем использовать алгоритм нечеткого логического вывода Мамдани [10].
2. Разработка непрерывного полуактивного закона управления системой подрессоривания на основе принципа противодействия продольно-угловым колебаниям корпуса с нечеткой настройкой параметров
Принцип работы алгоритма противодействия продольно-угловым колебаниям профессора А.А. Дмитриева обладает следующим существенным недостаткам: склонностью к возникновению автоколебаний, из-за чего приходится вводить зону нечувствительности, конкретные параметры которой – одна из форм неопределенности при проектировании регулятора. Чтобы избежать указанных трудностей, воспользуемся методами нечеткой логики. Для этого введем одну входную лингвистическую переменную «продольно-угловая скорость корпуса» ![]() и одну выходную лингвистическую переменную DELT, аналогично тому, как это было сделано в разделе 1. Функции принадлежности для входной переменной показаны на рис. 4, для выходной переменной – на рис. 3.
и одну выходную лингвистическую переменную DELT, аналогично тому, как это было сделано в разделе 1. Функции принадлежности для входной переменной показаны на рис. 4, для выходной переменной – на рис. 3.
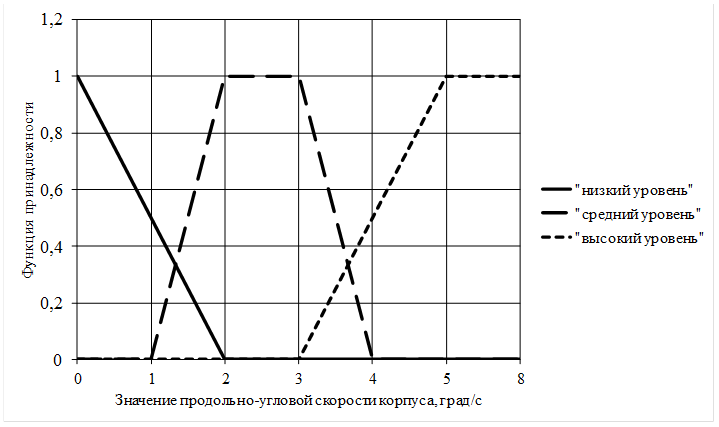
Рис. 4. Функции принадлежности входной переменной «Продольно-угловая скорость корпуса»
Полный набор нечетких правил выглядит следующим образом.
Будем использовать алгоритм нечеткого логического вывода Мамдани [10].
3. Анализ эффективности разработанных адаптивных непрерывных законов управления полуактивной системой подрессоривания
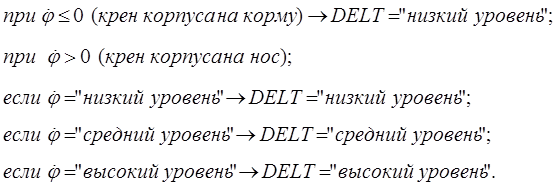
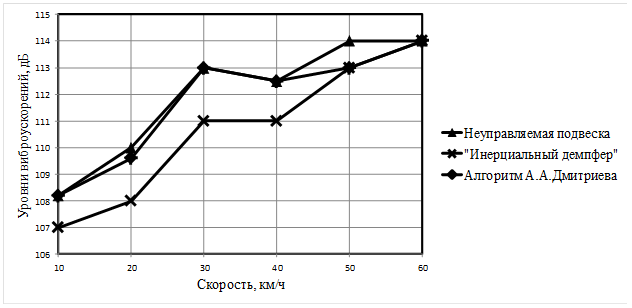
Для оценки эффективности разработанных адаптивных непрерывных законов управления подвеской на различных скоростях движения по грунтовой дороге второй категории [11] моделировалось движение МКМ в диапазоне скоростей 10…60 км/ч. Математическая модель движения МКМ представлена в работе [12], технические характеристики машины – в работе [11]. На рис. 5 (а–д) представлены уровни вертикальных виброускорений на месте водителя для I – V октавных полос частот.

а)
б)

в)
г)

д)
Рис. 5. Уровни вертикальных виброускорений в октавных полосах частот:
а) – I октава; б) – II октава; в) – III октава; г) – IV октава; д) – V октава.
Для проведения сравнительного анализа эффективности различных законов («инерциальный демпфер» и А.А.Дмитриева) используем критерий Ki (для i-ой скорости движения на всей совокупности грунтовых дорог), характеризующий работу данной системы по сравнению с неуправляемой подвеской [11]:
 (2)
(2)
Здесь ![]() - дисперсия вертикальных ускорений на месте водителя для случая управляемой подвески при движении с i-ой скоростью; j – номер категории грунтовой дороги.
- дисперсия вертикальных ускорений на месте водителя для случая управляемой подвески при движении с i-ой скоростью; j – номер категории грунтовой дороги.
Критерий (2) характеризует степень снижения дисперсии вертикальных ускорений на месте водителя для случая управляемой подвески по сравнению с неуправляемой системой подрессоривания. На рис. 6 показана зависимость показателя эффективности Ki для различных адаптивных законов управления от скорости движения для всей совокупности грунтовых дорог.

Рис. 6. Зависимость критерия эффективности Kiдля различных адаптивных законов управления подвеской для различных скоростей движения по грунтовым дорогам
Анализ представленных результатов позволяет сделать вывод о том, что эффективность (снижение уровня дисперсии вертикальных ускорений на месте водителя по сравнению с неуправляемой подвеской) адаптивного закона «инерциальный демпфер» составляет 7…20%, закона противодействия продольно-угловым колебаниям – 0…13%.
Выводы
1) На основе применения методов нечеткой логики разработаны адаптивные законы непрерывного управления полуактивной системой подрессоривания многоосных колесных машин, а именно адаптивный закон «инерциальный демпфер» и адаптивный закон противодействия продольно-угловым колебаниям.
2) Установлено методами имитационного моделирования, что эффективность (снижение уровня дисперсии вертикальных ускорений на месте водителя по сравнению с неуправляемой подвеской) адаптивного закона «инерциальный демпфер» составляет 7…20%, закона противодействия продольно-угловым колебаниям – 0…13%.
Работа выполнена при финансовой поддержке Министерства образования и науки Российской Федерации в рамках договора №9905/17/07-к-12 между ОАО «КАМАЗ» и «Московским государственным техническим университетом имени Н.Э. Баумана».
Список литературы
1. Жилейкин М.М. Синтез адаптивной динамической непрерывной системы гашения колебаний корпуса многоосных колесных машин // Наука и образование. МГТУ им. Н.Э. Баумана. Электрон. журн. 2011. № 10. Режим доступа: http://technomag.edu.ru/doc/347169.html (дата обращения 26.05.2013).
2. Жилейкин М.М. Синтез адаптивной динамической непрерывной системы стабилизации корпуса // Наука и образование. МГТУ им. Н.Э. Баумана. Электрон. журн. 2011. № 11. Режим доступа: http://technomag.edu.ru/doc/347435.html (дата обращения 26.05.2013).
3. Белоусов Б.Н., Попов С.Д. Колесные транспортные средства особо большой грузоподъемности. Конструкция. Теория. Расчет / Под общ. ред. Б.Н. Белоусова. М.: Изд-во МГТУ им. Н.Э. Баумана, 2006. 728 с.
4. Сухоруков А.В. Управление демпфирующими элементами в системе подрессоривания быстроходной гусеничной машины: дисс. ... канд. техн. наук. М., 2003. 204 с.
5. Жилейкин М.М. Разработка статического алгоритма управления подвеской многоосных колесных машин: автоматизированное преодоление эскарпа // Наука и образование. МГТУ им. Н.Э. Баумана. Электрон. журн. 2011. № 8. Режим доступа: http://technomag.edu.ru/doc/347058.html (дата обращения 26.05.2013).
6. Жилейкин М.М. Разработка статического алгоритма управления подвеской многоосных колесных машин: автоматизированное преодоление траншеи // Наука и образование. МГТУ им. Н.Э. Баумана. Электрон. журн. 2011. № 9. Режим доступа: http://technomag.edu.ru/doc/347098.html (дата обращения 26.05.2013).
7. Wang X., Gordaninejad F. Flow Analysis of Field-Controllable, Electro- and Magnetno-Rheological Fluids Using Herchel-Bulkley Model // Journal of Intelligent Materials, Systems and Structures. 2000. No. 2. P. 87-121.
8. Фурунжиев P.И., Останин А. Н. Управление колебаниями многоопорных машин. М.: Машиностроение, 1984. 206 с.
9. Жилейкин М.М. Разработка адаптивного алгоритма релейного управления двухуровневым демпфированием подвески многоосных колесных машин // Наука и образование. МГТУ им. Н.Э. Баумана. Электрон. журн. 2011. № 12. Режим доступа: http://technomag.edu.ru/doc/347444.html (дата обращения 26.05.2013).
10. Штовба С.Д. Проектирование нечетких систем средствами MATLAB. М.: Горячая линия-Телеком, 2007. 288 с.
11. Жилейкин М.М. Сравнительный анализ эффективности работы непрерывной и релейной систем управления подвеской многоосных колесных машин // Наука и образование. МГТУ им. Н.Э. Баумана. Электрон. журн. 2012. № 3. Режим доступа: http://technomag.edu.ru/doc/347783.html (дата обращения 26.05.2013).
12. Проектирование полноприводных колесных машин: учебник для вузов. В 3 т. Т. 3 / Афанасьев Б.А., Белоусов Б.Н., Жеглов Л.Ф. [и др.]; Под ред. А.А. Полунгяна. М.: Изд-во МГТУ им. Н.Э. Баумана, 2008. 432 с.
Публикации с ключевыми словами: нечеткая логика, адаптивное управление, многоосные колесные машины, управляемые системы подрессоривания
Публикации со словами: нечеткая логика, адаптивное управление, многоосные колесные машины, управляемые системы подрессоривания
Смотри также:
- Разработка закона стабилизации корпуса многоосных колесных машин при силовом и кинематическом воздействии на базе пропорционально-дифференциального регулятора с адаптивной настройкой параметров
- 77-30569/347444 Разработка адаптивного алгоритма релейного управления двухуровневым демпфированием подвески многоосных колесных машин
- Разработка адаптивного закона релейного управления трехуровневым демпфированием упруго-демпфирующих элементов подвески многоосных колесных машин
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||