научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 09, сентябрь 2012
DOI: 10.7463/0912.0476244
УДК 681.5
Россия, МГТУ им. Н.Э. Баумана
ekaterina.alekseeva90@gmail.com
Введение
Разработка систем управления перспективными динамическими объектами, в частности летательными аппаратами (ЛА), требует изучения новых подходов к их проектированию, создания новых концепций, модернизации существующего программно-алгоритмического обеспечения, создания новой элементной базы, применения новых информационных технологий.
В последнее время большое внимание уделяется исследованию интеллектуальных систем управления (ИС), основанных на теории функциональных систем П.К. Анохина [1].
На основе детального рассмотрения принципа действия ИС и современных возможностей реализации систем управления на борту ЛА используется концептуальный подход к задаче синтеза современных систем управления - подход синтеза интеллектуализированных систем управления (ИСУ), использующий в качестве интеллектуальной компоненты такую функциональную систему как акцептор действия [2, 3, 4]. В акцепторе действия ИСУ для построения прогнозирующих моделей используется генетический алгоритм. Реализация подхода продемонстрирована на примере разработки систем управления перспективными ЛА.
В настоящей статье представленны структуры систем управления, которые могут быть использованы для синтеза различных систем управления, управляющих комплексов для разнообразных динамических объектов.
Анализ состояния исследований и разработок в области современных систем управления ЛА
Бурное развитие кибернетики, вычислительной техники, биотехнологий, в частности, искусственного интеллекта привело к появлению новых методов и средств управления и оптимизации сложных систем управления. На стыке современной теории управления, искусственного интеллекта (ИИ), нейрофизиологии и микроэлектроники, активно формируется и развивается такая область исследования, как интеллектуальное управление.
Взаимопроникновение методов теории управления и ИИ привело к возникновению нового направления, которое названо интеллектным управлением [2]. Интеллектное управление включает такие разделы как нейроуправление, управление на основе знаний, в частности управление на основе правил и на основе логических моделей.
§ верхний уровень управления: целеполагание (ВУУ);
§ средний уровень управления: поиск способа достижения поставленной на верхнем уровне цели (СУУ);
§ нижний уровень управления: реализация выбранного на среднем уровне способа достижения поставленной цели (НУУ).
На современном этапе и в ближайшем будущем системы интеллектного управления, включающие эти три уровня функционируют следующим образом.
1. Постановка определенной цели функционирования:
§ выбор одной из определенного множества конкретных типовых ситуаций (ТС);
§ решение задачи целеполагания целиком возлагается на оператора, а проектировщиками бортового алгоритмического и индикационного обеспечения (АиИО) предоставляется оператору только информативная модель внешней обстановки.
2. Анализ возможных путей достижения цели и выбор из них предпочтительного пути:
§ решение задач СУУ обеспечивается, например, бортовой оперативно-советующей экспертной системой соответствующей ТС (БОСЭС ТС), тенденция следующего развития которой состоит в применении методов логического вывода.
3. Исполнение по выбранному пути операций для реализации цели:
§ решение задач НУУ аппаратно-алгоритмически поддерживается главным образом по традиционной структуре, хотя применение интеллектных компонентов управления возможно и целесообразно даже на этом уровне.
На рис. 1 приведена структурная схема ИС [3].
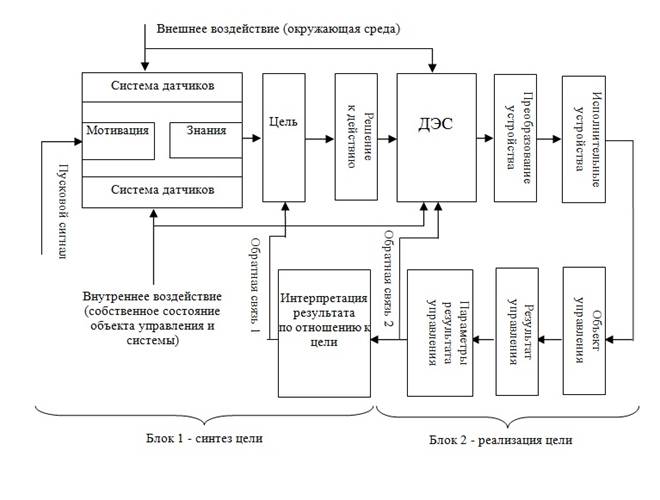
Рис. 1. Общая структура ИС
Синтез цели осуществляется с учетом информации о внешней (окружающей) среде, собственном состоянии интеллектуальной системы, мотивации. Затем динамическая экспертная система проводит оценку, которая лежит в основе принятия решения, а также осуществляется прогноз для акцептора действия. После того как решение выработано, реализуется управление.
Информации о соответствии результатов действия и прогноза передается в экспертную систему и в систему синтеза цели. Далее результаты воздействия этого управления на объект поступают в акцептор действия. Таким образом, при отсутствии соответствия результатов действия и прогноза вырабатывается новая экспертная оценка, принимается другое решение и реализуется новое управляющее воздействие. В случае, когда соответствия достичь невозможно, происходит изменение цели интеллектуальной системы. Если результаты действия соответствуют прогнозу, что говорит об удачно выбранном управлении, то цель интеллектуальной системой достигается.
Блок синтеза цели. В первом блоке (рис.1) на основе активного оценивания информации, полученной от системы датчиков, при наличии мотивации и знаний синтезируется цель и принимается решение к действию.
Активное оценивание информации осуществляется под воздействием пусковых сигналов. Изменчивость окружающей среды и собственного состояния системы может приводить к мотивации, а при наличии знаний может быть синтезирована цель. Под целью понимается формальное описание задач системы. Продолжая активно оценивать информацию об окружающей среде и собственном состоянии системы, в том числе объекта управления, при сопоставлении вариантов достижения цели можно принять решение к действию.
ДЭС. Во втором блоке ДЭС (рис. 1) на основании текущих сведений об окружающей среде и собственном состоянии ИС при наличии цели и знаний осуществляет экспертную оценку, принимает решение об управлении, прогнозирует результаты действия и вырабатывает управление. Представленное в кодированном виде управление преобразуется в физический сигнал и поступает на исполнительные устройства.
Объект управления, получая сигнал от исполнительных устройств, осуществляет то или иное действие, результаты которого, представленные в виде параметров, по цепи обратной связи поступают в ДЭС, где сравниваются с прогнозом.
Если цель достигается по всем параметрам, то управление подкрепляется. В противном случае происходит коррекция управления. Когда цель недостижима, то она корректируется.
Следует заметить, что при внезапных изменениях состояния окружающей среды, объекта управления, или системы в целом, возможен синтез новой цели и организация ее достижения.
Кроме того, функциями ДЭС являются также оценка результатов решения задачи, прогнозирование параметров будущего результата действия, принятия решения об управлении, выработка управления и сличение параметров желаемого и реального результатов.
В рамках концепции синтеза ИС современная сложная система управления разрабатывается как функциональная система в живой природе П.К.Анохина с присущим ей приспособительным эффектом. Подобные интеллектуальные системы состоят из набора более простых функциональных систем. Все подсистемы связаны между собой таким образом, чтобы был реализован механизм полезного приспособительного результата для каждой подсистемы и ИС в целом, а также принцип саморегуляции с постоянной информацией о состоянии конечного приспособительного результата рассматриваемой интеллектуальной системы. Отличительными чертами любого результата, способствующего достижению цели, является то, что он непременно получается на основе принципа саморегуляции, независимо от уровня и сложности обладает одними и теми же узловыми механизмами. Этими механизмами являются: афферентный синтез цели; принятия решения к действию; эфферентная программа действия; акцептор действия, прогнозирующий параметры будущего результата; обратная афферентация о параметрах результата действия; процесс сличения параметров реально полученного результата с параметрами, предсказанными или спрогнозированными в акцепторе действия.
Основными преимуществами использования вышеизложенной структуры для теории и практики ИС, являются универсальная архитектура функциональных систем, а также отточенные эволюцией механизмы функциональных систем. Разделение функциональных подсистем в интеллектуальных системах позволяет нам на первом этапе реализовать функции по каждым блокам отдельно с учетом использования различных элементов интеллектного управления, а потом осуществлять интеграции подсистем в сочетании с применением традиционных и современных методов теории управления. Глобальная проблема синтеза интеллектуальных систем в соответствии со схемой рис. 1 разбивается на несколько задач [3, 4].
Задача синтеза цели интеллектуальной системы предполагает создание или адаптацию уже имеющихся методов и средств получения информации об окружающей среде. Необходимо также иметь методы, позволяющие определять состояние интеллектуальной системы в целом, составляющих ее элементов и отдельных функциональных систем. При формировании цели требуется достоверная информация о состоянии интеллектуальной системы, а также обширная база знаний, достаточная для реализации поставленной цели.
При реализации ИС ЛА различных уровней интеллектуализации. Обычно условно выделяют два направления применения ИС на практике: управляющие ИС и консультативные ИС.
Интеллектуализированные системы управления ЛА
В настоящее время в современных ЛА широко используются консультативные ИС [2, 5].
Бортовые оперативно-советующие экспертные системы (БОСЭС) относятся к классу консультативных ИС, функционирующая в реальной информационной среде и ориентируется на реальные условия возможных сценариев изменения внешней обстановки. БОСЭС на верхнем и среднем уровнях должна стремиться к созданию в бортовых алгоритмах оперативных процедур логического вывода и порождения гипотез, отвечающих представлениям человека о правильности рассуждений и возможности их провести в сложившейся информационной среде борта.
Совершенствования свойств ЛА осуществляется посредством улучшения его аэродинамики, двигателя и бортового оборудования, а также путем совершенствования интеллектуальной составляющей «системообразующего ядра» авиационного комплекса, которая реализуется в бортовых алгоритмах и совместно с традиционными алгоритмами создают функционально целостную систему «экипаж – бортовая аппаратура – ЛА».Существующие исследовательские прототипы БОСЭС находятся в основном на СУУ и НУУ.Для совершенствования БОСЭС целесообразно исследовать их с системных позиций, проанализировать практически значимые БОСЭС и рассмотреть структуры их базы знаний.
Построение бортовых АиИО БОСЭС ЛА осуществляется обычно по следующим этапам:
1) концептуализация предметной области с выделением типовых ситуацией (ТС) и проблемных субситуацией соответствующей ТС, упорядоченных причинно-следственным отношением;
2) конструирование базы знаний и разработка базового образца бортовой ИС;
3) совершенствование базы знаний в системах имитационного моделирования.
При внедрении в бортовых АиИО элементов ИИ и экспертных систем конструкторы ставят перед собой задачу внедрить их на уровни «выбора способа достижения поставленной цели» и «реализация способа разрешения текущей Проб/Субс». Для каждой ТС будут работать соответствующая БОСЭС и экспертные системы бортовых измерительных и исполнительных устройств, которые обеспечивают максимально полное получение необходимой информации в данный момент о внешней обстановке и о состоянии бортовой аппаратуры, максимально точное исполнение принятых решений.
Эффективность ИС и целесообразность ее разработки в большой степени зависит от структуры базы знаний, от ее адекватности и полноты.
Для каждой Суб/С ТС нужно построить ее базу знаний. Для каждой Суб/С этой ТС составляется список объектов-деятелей и значимых событий. Каждая Суб/С этой ТС представлена совокупностью математических моделей, которая описывает пространственное расположение участников Суб/С, прогнозирует его изменение во времени и определяет моменты возможного наступления значимых событий. Это совокупность является сценарием Суб/С соответствующей ТС.
Часто требуется предварительное исследование Суб/С с использованием ряда математических моделей, которые формулируются в форме математических задач оптимального управления, теории игр, различных задач принятия решений. Полученное в результате таких исследований или подобранное при имитационном моделировании «рациональное разрешение» Суб/С закладываются в математические модели, которые являются одним из блоков базы знаний в БОСЭС. Анализ внешней и бортовой обстановки и выработка соответствующих рекомендаций летчику с помощью правил-продукций, которые тоже заложены в базу знаний БОСЭС. В итоге знания, необходимые для работы БОСЭС, закладываются в виде правил, математических моделей и группируются по сценариям.
Одной из сложных задач при разработке БОСЭС является способ приобретения знаний, который применяется в процессе создания базы знаний.
После приобретения знаний формируется база знаний, на основе которой механизм логического вывода манипулирует действиями по моделированию и направляет основанный на правилах автоматизированный процесс рассуждения.
В таких концепциях синтеза ИС одним из рациональных методов для реализации является гибридная система, которая обладает двухуровневой структурой по степеням интеллектуальности, т.е. часть системы высшего уровня, являющаяся экспертной системой, основанной на базе знаний и система низшего уровня, использующая интеллектные элементы для моделирования и управления. При неопределенных условиях внешней среды и самого объекта экспертная система обеспечивает робастность функционирования системы. С течением времени, когда периферийная часть системы подбирает более подробную и достоверную информацию, происходит уточнение модели объекта и управления, тем самым обновляется и пополняется база знаний.
Интеллектуальные системы управления
Одним из перспективных направлений синтеза ИС является симбиоз экспертных систем, методов самоорганизации, принятия решений, адаптивного управления и оценивания, а также алгоритмов формирования цели, объединенных в рамках функциональной структуры П.К. Анохина.
В рамках концепции синтеза ИС [4] современная сложная система управления разрабатывается как функциональная система с присущим ей приспособительным эффектом. Отличительная черта любого результата, который способствует достижению цели, это то, что он получается на основе принципа саморегуляции и обладает одинаковыми узловыми механизмами, а именно, афферентным синтезом цели, принятием решения к действию, эфферентной программой действия, акцептором действия, обратной афферентации о параметрах результата и сличением параметров полученного результата с параметрами, прогнозированными акцептором действия.
Основными преимуществами использования теории функциональных систем Анохина для теории и практики ИС, являются универсальная архитектура функциональных систем, а также отточенные эволюцией механизмы функциональных систем.
Синтез цели осуществляется с учетом информации о внешней среде, собственном состоянии ИС, мотивации и при наличии памяти. Затем ДЭС проводит оценку, которая лежит в основе принятия решения, а также осуществляется прогноз для акцептора действия. После того, как решение выработано реализуется управление.
Акцептор действия реализуется посредством алгоритма самоорганизации, который позволяет построить прогнозирующую модель в условиях минимума априорной информации. Информации о соответствии результатов действия и прогноза передается в экспертную систему и в систему синтеза цели.
Таким образом, при отсутствии соответствия результатов действия и прогноза вырабатывается новая экспертная оценка, принимается другое решение и реализуется новое управляющее воздействие. В случае, когда соответствия достичь невозможно, происходит изменение цели ИС. Если результаты действия соответствуют прогнозу, что соответствует удачно выбранному управлению, то цель интеллектуальной системы достигается.
Подобная структура ИС является универсальной и может служить основой при синтезе систем управления различными динамическими объектами.
Решение задачи синтеза цели системы требует разработки методов и средств получения информации об окружающей среды и методов эффективной идентификации собственного состояния, как объекта управления, так и самой системы. При формировании цели возникает проблема достаточности базы знаний, а соответственно, и памяти, возможности их реализации, как на содержательном, так и на конструктивном уровне. ДЭС наряду с задачами расчета, оптимизации, моделирования будущих результатов должна обеспечивать высокое быстродействие. Потенциал, накопленный при разработке алгоритмов принятия решений и выработки управления, может успешно использоваться в ИС, однако их реализация потребует распараллеливания алгоритмов и их мультитранспьютерной реализации и, конечно, не исключает синтеза новых эффективных алгоритмов. Возмущающим воздействием для ИС является окружающая среда. Эффективное функционирование ИС должно обеспечить в конечном итоге компенсацию возмущающих воздействий при достижении цели. Поэтому одной из фундаментальных проблем теории ИС является разработка адекватных живой природе математических моделей.
В ИС закон управления представляется не в виде какого-либо фиксированного преобразователя входных данных в выходные, а в виде некоторой подсистемы, позволяющей на основании входных данных принимать решение и вырабатывать управление на основе использования знаний, хранящихся в этой подсистеме.
ИС включают многообразное алгоритмическое обеспечение, состав и конфигурация которого меняется в процессе функционирования. В связи с этим представляется целесообразным при синтезе ИС разрабатывать алгоритмическое обеспечение для каждой фазы ее жизнедеятельности.
Функциональная структура интеллектуальной системы
Одним из перспективных направлений синтеза ИС является симбиоз экспертных систем, методов самоорганизации, принятия решений, адаптивного управления и блока синтеза цели, объединенных в рамках функциональной структуры П.К.Анохина. Подобные ИС представляют собой сложные функциональные системы, которые, в свою очередь, состоят из набора более простых функциональных систем.
Структура интеллектуальной системы представлена на рис. 2 [3].
В блоке синтеза цели на основе памяти и мотивации, информации о внешней среде, собственном состоянии ИС осуществляется формирование цели функционирования системы. Далее сигнал поступает в ДЭС и в систему принятия решений. На основе этой информации вырабатывается управление.
Результаты воздействия управления на объект поступают в акцептор действия, а, затем, информация о соответствии результатов действия и прогноза передается в ДЭС и в блок синтеза цели.

Рис. 2. Структура интеллектуальной системы
При несоответствии результатов действия и прогноза вырабатывается новое управляющее воздействие или новая цель. Если же результаты действия соответствуют прогнозу, то цель ИС выбрана правильно и управление реализуется эффективно.
Цель функционирования ИС формируется на основе постоянно увеличивающейся базы данных и механизма мотивации. Обычно в практических приложениях достаточно простая функциональная система, реализующая механизм мотивации, представляет собой ансамбль критериев и правила селекции цели.
Обычно при движении ЛА выбор траектории осуществляется посредством предлагаемой функциональной структуры ИС с учетом максимального самосохранения. Если на последнем этапе функционирования динамического объекта происходит его самоуничтожение, то это обстоятельство не влияет на возможность и обоснованность использования функциональной структуры для ИСУ динамического объекта.
Функциональная структура может быть использована при синтезе ИС ЛА. В блоке мотивации необходимо предусмотреть изменение весовых коэффициентов критериев селекции цели в зависимости от фазы функционирования динамического объекта. Либо использовать в последней фазе функционирования динамического объекта какие-либо программные алгоритмы управления.
Обеспечение энергоресурсами функциональных систем оптимизируется на всех этапах работы ИС и рассчитывается таким образом, чтобы при завершении каждого промежуточного цикла изделия запас энергоресурсов стремился к нулю. На всем интервале функционирования ИС осуществляется оптимизация расхода не только энергоресурсов, но и информационных ресурсов задействованных функциональных структур, которые решают текущие задачи ИС и т.д.
Синтез интеллектуализированных систем управления
На современном этапе в большинстве практических приложений реализуются системы управления, в которых цель функционирования системы задана априори. Такие системы называются ИСУ или системами с интеллектуальными компонентами. Существенным преимуществом таких систем является возможность реализации на базе серийных вычислительных средств.
При разработке перспективных ЛА в качестве базовой схемы управления может быть использована двухконтурная схема ИСУ с контуром управления опорным движением центра масс и контуром управления относительно опорной траектории. Предлагается состав функциональных групп основных алгоритмов для рассматриваемого варианта ИСУ, который приведен на рис. 3.
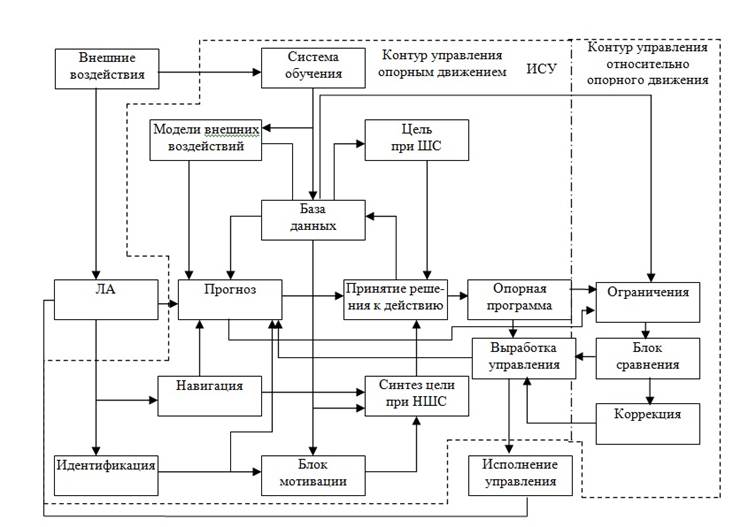
Рис. 3. Структура ИСУ с двухконтурным алгоритмом управления полетом ЛА
Разработана базовая структурная схема ИСУ перспективных ЛА представлена на рис. 4.
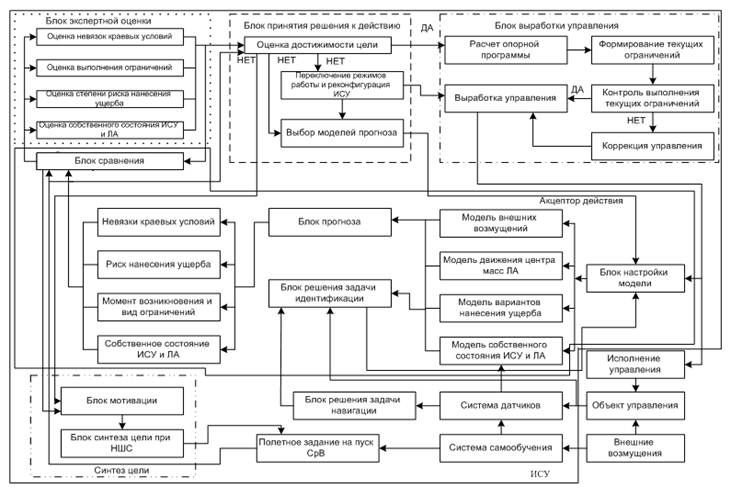
Рис. 4. Базовая структурная схема ИСУ перспективных ЛА
Акцептор действия состоит из алгоритма построения прогнозирующих моделей, алгоритма прогноза и блока сличения результата.
Задача построения математических моделей адекватных исследуемому процессу остается одной из наиболее сложных и важных проблем теории управления.
В условиях минимального объема априорной информации и без учета некоторых существенных факторов, характеризующих исследуемый объект для построения моделей используется подход самоорганизации или генетический алгоритм [6, 7].
Генетические алгоритмы
Использование только ГА для решения задачи не эффективно, так в этом случае поиск оптимального значения параметров аппроксимирующей функции производится недостаточно направленно. В связи с этим, для более быстрого и более точного нахождения решения следует использовать один из математических методов поиска минимума функционала, представляющего собой, например, среднеквадратическое отклонение построенной модели от имеющихся значений выборки реальной функции времени. Тем не менее, найти глобальный минимум, в общем случае, достаточно трудно из-за наличия значительного числа локальных экстремумов и такая задача требует значительных вычислительных затрат при практически полном переборе возможных решений с заданной точностью. Приемлемым способом нахождения значений параметров аппроксимирующей функции, приближенных к оптимальным, является поиск локальных экстремумов при помощи градиентного .
Наиболее полно удовлетворяющим поставленной задаче способом получения прогноза является комбинирование ГА и аппроксимации многочленом по методу наименьших квадратов. Использвание совмещенного алгоритма позволяет сторить прогнозы практически любых процессов при сравнительно небольшой предыстории.
Сокращение вычислительных затрат при реализации ГА в спецвычислителе ЛА можно осуществить с помощью модификации ГА путем ужесточения отбора и организации процедуры кроссинговера, известный способ сокращения числа хромосом при делении – копирующий мейоз. Использование мейоза предусматривает скрещивание особей с сокращением числа хромосом. Такой подход позволяет сделать процедуру построения моделей более компактной по сравнению с классическим ГА.
Структурная схема ГА с использованием процедуры мейоза представлена на рис. 5.
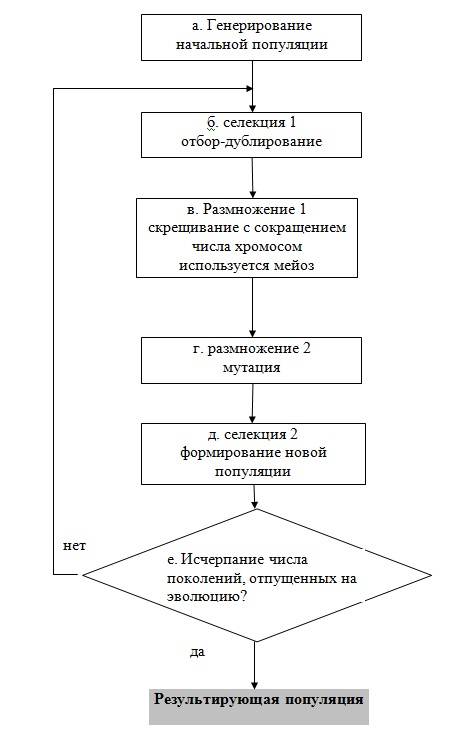
Рис. 5. Генетический алгоритм, использующий процедуру мейоза
Однако такой модифицированный ГА обладает меньшей точностью по сравнению с классическими ГА.
Полученная на основе проведенных измерений математическая модель используется в алгоритмическом обеспечении ИСУ ЛА, в частности с помощью математической модели осуществляется прогноз состояния системы на некотором интервале времени, который выбирается из практических соображений в соответствии с режимом функционирования ЛА. Таким образом, реализуется акцептор действия ИСУ.
СПИСОК ЛИТЕРАТУРЫ
1. Анохин П.К. Биология и нейрофизиология условного рефлекса. М.: Медицина, 1968. 325 с.
2. Васильев С.Н., Жерлов А.К., Федосов Е.А., Федунов Б.Е. Интеллектуальное управление динамическими системами. М.: Физматлит, 2000. 420 с.
3. Макарова И.М., Лохина В.М. Интеллектуальные системы автоматического управления. М.: Физматлит, 2001. 375 с.
4. Пролетарский А.В. Концепция системного синтеза динамических объектов // Автоматизация и современные технологии. 2007. № 8. C. 28-31.
5. Федосов Е.А. Бортовые экспертные системы тактических самолетов 5-го поколения. М.: Научно-информационныйцентрГосНИИАС, 2002. 265 с.
6. Fang Ke, Proletarsky A., Neusipin K. Selection of Measured Signals in the Navigation Measuring Complex // Journal of Measurement Science and Instrumentation. December 2011. Vol. 02, no. 04. P. 346-348.
7. Proletarsky A., Neusipin K. Reserch scalar filtering algorithm with selforganization method for modeling control system // Science & military. 2010. Vol. 5, № 2. P. 17-21.
Публикации с ключевыми словами: интеллектуальная система, генетический алгоритм, летательный аппарат, интеллектуализированная система управления
Публикации со словами: интеллектуальная система, генетический алгоритм, летательный аппарат, интеллектуализированная система управления
Смотри также:
- Модели и алгоритмы многокритериальной оптимизации АИС при нечеткой информации
- Mеждународная конференция по системам искусственного интеллекта при поддержке IEEE 3 - 10 сентября 2006 г. Россия, Краснодарский край, пос. Дивноморское
- 77-30569/326903 Разработка измерительного комплекса летательного аппарата на основе подхода алгоритмического конструирования
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||