научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 07, июль 2012
DOI: 10.7463/0712.0442268
УДК 621.363
Россия, МГТУ им. Н.Э. Баумана
Введение
Надежность и стабильность работы радиоэлектронной аппаратуры (РЭА) значительно ухудшается при динамических механических воздействиях большой амплитуды. Эти воздействия приводят к нестабильной работе информационно-телекоммуникационной аппаратуры, а также к механическим разрушениям элементов конструкций. Одним из основных методов защиты при электромагнитном старте беспилотных космических аппаратов является отключение электропитания. В отечественной и зарубежной практике исследования не вышли на практический уровень. Таким образом, теоретическая и практическая разработка системы защиты информационно-телекоммуникационной аппаратуры беспилотных космических аппаратов (ИТА КА) и ее элементов, при достижении беспилотными КА ускорений в несколько тысяч и десятков тысяч g является актуальной и новой задачей.
Основная цель работы заключается в обосновании метода построения системы защиты ИТА КА на микроэлектромеханических сенсорных элементах (микроключах), проведении теоретических расчетов и компьютерного моделирования параметров микроэлектромеханических сенсорных элементов, а также оценке их статических и динамических характеристик.
Обзор состояния вопроса. Существует несколько основных методов защиты ИТА КА. Наиболее перспективным вариантом системы защиты ИТА КА являются системы защиты, основанные на микромеханических микропереключателях или микроакселерометрах. Применение сенсорных микроэлектромеханических элементов, изготовленных по технологии поверхностной микрообработки кремния, для систем защиты ИТА КА позволит ощутимо уменьшить габариты и повысить их быстродействие.
Место работы среди известных работ. По результатам проведенного патентного поиска [1] показано, что реализация системы защиты информационно-телекоммуникационной аппаратуры беспилотных космических аппаратов на устройствах микросистемной техники является принципиально новым решением. Однако условия работы подобной системы защиты (наличие динамических перегрузок большой амплитуды) сравнимы с областью, где используются т.н. «шок-сенсоры». В этой области известен ряд работ [2, 3], направленных на создание датчиков, срабатывающих при нескольких уровнях перегрузки.
Предлагаемый в настоящей работе подход к построению системы защиты основан на использовании плоской полупроводниковой подложки и формировании чувствительных элементов в едином сокращенном технологическом цикле при невысоких температурах технологических процессов, являющихся двухконсольными балками с чувствительной массой, которая надежно шунтирует электрическую цепь питания ИТА КА путем замыкания контактных площадок при воздействии динамической перегрузки.
Краткое содержание работы по разделам. В первом разделе приведен теоретический расчет и компьютерное моделирование геометрических параметров сенсорных микроэлектромеханических элементов, а также технологический алгоритм их изготовления. Во втором приведены результаты испытаний статических и оценка динамических характеристик сенсорных микроэлектромеханических элементов. В заключении к работе сформулирована методология построения системы защиты ИТА КА на основе микроэлектромеханических сенсорных элементов - ключей.
1. Теоретический расчет и компьютерное моделирование геометрических параметров сенсорных микроэлектромеханических элементов. Технологический алгоритм их изготовления.
Элементами большинства систем защиты ИТА КА являются микроэлектромеханические сенсорные элементы – ключи. При больших ускорениях элементы ключей упруго деформируются и отключают электропитание при примыкании к контактным площадкам инверторной схемы отключения электропитания, реализованной на одной подложке с ключами. Исходя из требований к простоте конструкции и технологичности ее изготовления, выбран вариант двухконсольной мостиковой структуры с сосредоточенной (инерционной) массой в центре упругого сенсорного элемента (рисунок 1) и заданы ее основные геометрические размеры (таблица 1).

Рисунок 1 – Геометрические размеры микроэлектромеханических сенсорных элементов
Таблица 1 - Геометрические размеры микроэлектромеханических сенсорных элементов
Геометрический размер | Значение, мкм |
Длина инерционной массы | 500 |
Ширина инерционной массы | 200 |
Ширина упругой части сенсорного элемента | 50 |
Толщина инерционной массы | 6 |
Толщина опор | 5 |
Толщина упругой части сенсорного элемента | 2 |
Значимым параметром для обеспечения функциональности микроэлектромеханических сенсорных элементов – ключей является длина упругого элемента. Размер упругого элемента влияет на изгибную жесткость ключа, а значит и на уровень его срабатывания под действием динамической перегрузки. Для нахождения длины упругого элемента воспользуемся расчетом параметров механической системы по уравнениям Лагранжа.
Микромеханическая система может быть разделена на дискретные элементы, что используется при моделировании динамики жесткого тела. Некоторые элементы структуры могут быть представлены как абсолютно жесткие тела с определенной массой, в то время как другие модели могут включать эффекты изгиба, кручения, растяжения и сдвига.
Механическая система, имеющая несколько степеней свободы, может быть представлена в зависящих от степеней свободы координатах q1, q2, q3 и времени t. Основной метод расчета уравнений движения - теорема Лагранжа [4]:

где L = T – V – оператор Лагранжа;
Т – кинетическая энергия системы;
V – потенциальная энергия системы, возникающая под действием консервативных сил.
Неконсервативные силы заложены в элементе Qnci. Если учитывать силы трения, то теорема Лагранжа, приобретет вид [4]:

![]()
где Qext,i – внешние силы.
Кинетическая и потенциальная энергия могут быть представлены выражениями:
 , (3)
, (3)

где mij – коэффициент инерции;
kij – коэффициент жесткости.
Рассмотрим теорему Лагранжа для жесткой прямоугольной пластины, подвешенной на четырех упругих элементах (пружинах), расположенных по краям пластины (рисунок 2). Для упрощения вычислений примем, что основные процессы перемещений и деформаций микроэлектромеханических сенсорных элементов происходят в направлении одной оси.
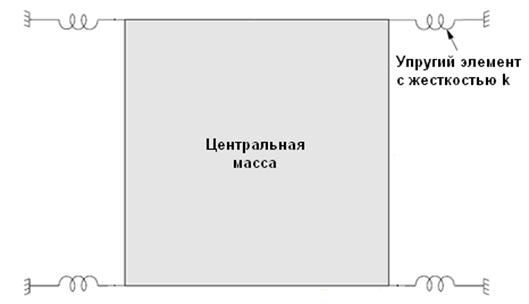
Рисунок 2 – Жесткая прямоугольная пластина, подвешенная на четырех упругих ![]() элементах (пружинах), расположенных по краям пластины
элементах (пружинах), расположенных по краям пластины
Общая потенциальная энергия пружин состоит из суммы потенциальных энергий каждой пружины. Угловая аппроксимация дает выражение для потенциальной энергии
![]()
![]() , (6)
, (6)
где kx – коэффициенты жесткости в направлении x.
Примем, что сила упругости линейно зависит от перемещения. Также примем, что пружины не имеют массы. Тогда выражение для кинетической энергии запишется в виде
![]() (7)
(7)
где m – масса пластины.
Выражения для кинетической и потенциальной энергий для системы, использованные в выражении (2) и затем решенные для каждой из шести координат, суммируются в уравнении движения
![]() , (8)
, (8)
где Fx– внешняя сила, действующая на пластину.
Для упрощения расчетов примем, что коэффициент жесткости системы из четырех упругих элементов равен
 , (9)
, (9)
В таблице 2 представлены результаты расчетов коэффициентов жесткости упругого элемента в направлении x в зависимости от его длины.
Таблица 2 – Значения коэффициента жесткости упругого элемента в направлении x
Параметр | Значения | ||||
Длина упругого элемента, мкм | 200 | 250 | 275 | 300 | 350 |
kx (коэффициент жесткости в направлении х), Н/м | 34,1 | 32,3 | 30,9 | 28,3 | 27,3 |
Из таблицы 2 видно, что с увеличением толщины упругого элемента возрастают значения изгибной жесткости конструкции. Если прогиб должен составлять 5 мкм при значении перегрузки примерно 3000 g, то длина ножек вместе с пластиной должна быть немного больше 250 мкм (от 255 до 260 мкм). Если же прогиб 5 мкм должен наблюдаться при 2500 g, то длина ножек должна быть немного больше 350 мкм (от 360 до 375 мкм).
Конструкция сенсорного микроэлектромеханического ключа может быть описана компьютерной 3D-моделью, представленной на рисунке 3.

Рисунок 3 – Компьютерная 3D-модель сенсорного микроэлектромеханического ключа
В качестве материала сенсорных элементов выбран гальванический никель (характеристики гальванического никеля указаны в таблице 3).
Таблица 3 – Характеристики гальванического никеля
Характеристика материала | Значение |
Модуль Юнга, Па | 7,9∙1010 |
Коэффициент Пуассона | 0,28 |
Модуль сдвига, Па | 5,98∙1010 |
Объёмный модуль упругости, Па | 3,08∙1010 |
Предел текучести при растяжении, Па | 1,2∙108 |
Предел текучести при сжатии, Па | 2,8∙108 |
Исходя из симметрии конструкции сенсорного микроэлектромеханического элемента, для расчетов основных характеристик была взята четвертая часть центральной массы с одним упругим элементом (рисунок 4).
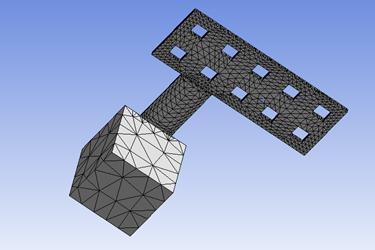
Рисунок 4 – 3D-модель сенсорного микроэлектромеханического элемента, разбитая на конечные элементы
Параметр оптимизации – длина ножек. При значительной длине ножек существенно снижается коэффициент запаса по пределу прочности материала. Для снижения вероятности отказа необходимо уменьшить концентрацию напряжений в местах соединения ножек и пластины, а также ножек и опоры (рисунок 5).

Рисунок 5 – Поле внутренних деформаций при прогибе центральной массы сенсорного микроэлектромеханического элемента на величину 5 мкм
Результаты компьютерного моделирования сенсорных микроэлектромеханических элементов для двух уровней перегрузки приведены в таблице 4.
Таблица 4 - Результаты компьютерного моделирования сенсорных микроэлектромеханических элементов
Параметр | Тип сенсорного микроэлектромеханического элемента | |
К1 (для перегрузки 2500g) | К2 (для перегрузки 3000g) | |
Длина упругой части, мкм | 360 | 245 |
Максимальное значение внутренних напряжений, МПа | 93 | 117 |
По результатам анализа таблицы 4 можно сделать вывод о том, что результаты компьютерного моделирования длины упругих элементов практически полностью совпадают с результатами теоретического расчета (погрешность составляет не более 4 %). Также можно сделать вывод о неразрушении конструкции под действием заданных уровней динамического воздействия, поскольку максимальное значение внутренних напряжений, возникающих в сенсорных микроэлектромеханических элементах не превышает предела текучести конструкционного материала.
Технологический процесс изготовления экспериментальных образцов модулей защиты ИТА КА (на основе сенсорных микроэлектромеханических элементов) можно разбить на четыре основных этапа:
- формирование нижней металлизации (контактных площадок и проводников);
- формирование «жертвенного» слоя;
- формирование гальванической навески (микроэлектромеханических ключей);
- удаление «жертвенного» слоя.
Усовершенствованная технологическая схема изготовления микроэлектромеханического ключа предложена в заявке на изобретение [5].
Краткая технологическая схема изготовления сенсорных микроэлектромеханических элементов представлена на рисунке 6.
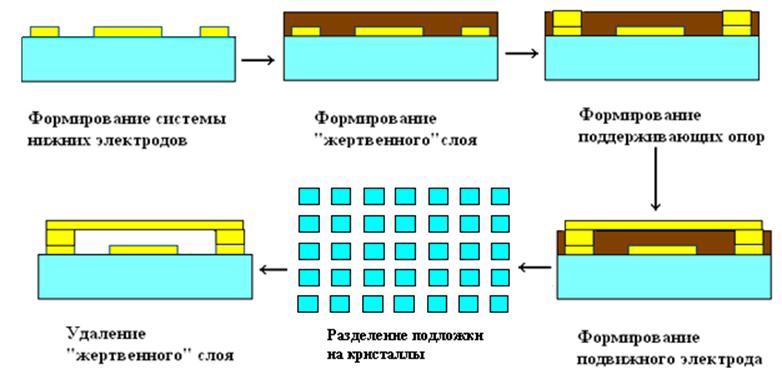
Рисунок 6 – Краткая технологическая схема изготовления сенсорных микроэлектромеханических элементов
По предложенной технологической схеме изготовлен кристалл системы защиты ИТА КА. Внешний вид кристалла показан на рисунке 7.

Рисунок 7 – Внешний вид экспериментального образца кристалла системы защиты ИТА КА от перегрузок
Основной блок системы защиты на основе сенсорных микроэлектромеханических элементов в металлокерамическом корпусе без крышки показан на рисунке 8.
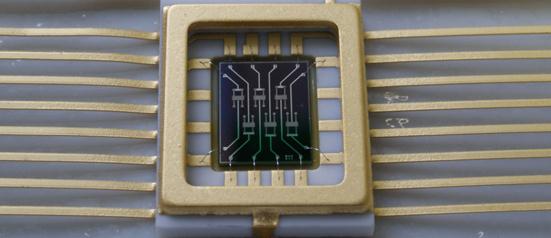
Рисунок 8 – Основной блок системы защиты ИТА КА на основе сенсорных микроэлектромеханических элементов
2 Результаты исследований изгибной жесткости и оценка динамических характеристик сенсорных микроэлектромеханических элементов
Исследование изгибной жесткости проводилось методом измерительного динамического индентирования с помощью сканирующего нанотвердомера «НаноСкан-3D», позволяющего измерять зависимости смещения сенсорных элементов от нагрузки в диапазоне деформаций до нескольких десятков микрометров [6].
Характер зависимости представлен на рисунке 9. Экспериментальные данные аппроксимировались линейной зависимостью. Изгибная жесткость сенсорного микроэлектромеханического элемента определяется как угловой коэффициент аппроксимирующей функции.
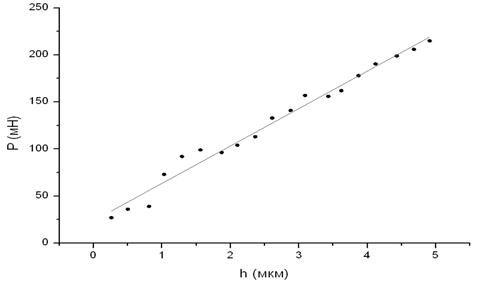
Рисунок 9 – Зависимость нагрузки от деформаций сенсорного микроэлектромеханического элемента
Результаты исследований по определению характеристик образцов сенсорного микроэлектромеханического элемента представлены в таблице 5.
Таблица 5 – Результаты исследований сенсорного микроэлектромеханического элемента
Тип ключа | Среднее значение деформации, мкм | Среднее значение изгибной жесткости, Н/м | Разброс параметра, % |
1 | 5,15 | 27,14 | 0,58 |
2 | 5,10 | 32,31 | 0,47 |
Поскольку процесс разгона КА при электромагнитном старте носит кратковременный характер, то необходимо оценить динамические характеристики сенсорных микроэлектромеханических элементов, определяющие работоспособность конструкции.
С помощью компьютерного моделирования были оценены динамические характеристики сенсорных микроэлектромеханических элементов двух типов (для перегрузки 2500 g и 3000 g). Результаты моделирования представлены в таблице 6.
Таблица 6 – Результаты компьютерного моделирования динамических параметров сенсорных микроэлектромеханических элементов
Параметр | Тип сенсорного микроэлектромеханического элемента | |
К1 (для перегрузки 2500g) | К2 (для перегрузки 3000g) | |
Время срабатывания, мкс | 34,7 | 39,5 |
Коэффициент запаса (min) | 1,06 | 1,52 |
Собственная частота колебаний (1 тон), Гц | 4815 | 9347 |
Собственная частота колебаний (2 тон), Гц | 64950 | 80712 |
Результаты, представленные в таблице 6 показывают, что предложенная конструкция сенсорных микроэлектромеханических элементов системы защиты ИТА КА обладает высокой работоспособностью. Время срабатывания исполнительных элементов сравнимо со временем нарастания динамической перегрузки (около 50 мкс), что позволяет своевременно отключать электрические цепи КА.
Заключение
На основании изложенного можно сформулировать методологию построения системы защиты ИТА КА на основе микроэлектромеханических ключей.
1) Система защиты ИТА КА может быть построена на основе применения групповых технологических процессов микроэлектроники.
2) Предлагаемый в работе подход к построению системы защиты ИТА КА заключается в использовании надежного чувствительного элемента в виде двухконсольной мостиковой структуры с сосредоточенной (инерционной) массой в центре упругого элемента.
3) В качестве метода построения системы защиты ИТА КА целесообразно использование инверторной схемы отключения электропитания посредством примыкания чувствительного элемента к контактной площадке планарной электрической схемы на плоской полупроводниковой подложке.
4) В качестве метода изготовления микроэлектромеханического ключа целесообразно использование формирование ключа на плоской полупроводниковой подложке за счет последовательного осаждения слоев металла, окисла, жертвенного слоя, фоторезиста и их последующей обработки.
Результаты исследований, приведенные в статье, получены в процессе выполнения НИР «Исследование путей создания системы защиты от перегрузок информационно-телекоммуникационной аппаратуры беспилотных космических аппаратов при электромагнитном старте» по ГК № 07.514.11.4066 в рамках мероприятия 1.4 федеральной целевой программы «Исследования и разработки по приоритетным направлениям развития научно-технологического комплекса России на 2007-2013 годы».
Список литературы
1. К.П. Лихоеденко, Г.Л. Павлов, А.В. Капустян, В.Ю. Цыганков. Отчет о патентных исследованиях. «Исследование путей создания системы защиты от перегрузок информационно-телекоммуникационной аппаратуры беспилотных космических аппаратов при электромагнитном старте». Государственный контракт от № 07.514.11.4066.
2. Hsu и др. Патент US 2011/0175540 А1. «Overload protection device for led luminery».
3. W.J.Reich и др. Патент US 6,619,123 В2. «Шок-сенсор».
4. Fedder G.K. Simulation of microelektromechanical systems// Ph.D. dissertation, Dept.Elect.Eng.Comput.Sci., Univ.California at Berkeley, Berkeley, CA, 1994.,p. 235.
5. Заявка на изобретение от 20.07.2012 № 2012130967 «Способ изготовления микроэлектромеханического ключа для защиты информационно-телекоммуникационной аппаратуры при электромагнитном старте».
6. Наноскан-3Д // Информационный ресурс Технологического института сверхтвердых и новых углеродных материалов. URL: http://www.nanoscan.info/продукция/приборы/наноскан-3д/pdf(дата обращения: 29.01.2010).
Публикации с ключевыми словами: космический аппарат, микроэлектромеханический сенсорный элемент, динамическая перегрузка, электромагнитный старт, информационно-телекоммуникационная аппаратура
Публикации со словами: космический аппарат, микроэлектромеханический сенсорный элемент, динамическая перегрузка, электромагнитный старт, информационно-телекоммуникационная аппаратура
Смотри также:
- 77-30569/2229653 Моделирование сценариев оперативного управления полетом космического аппарата
- Вопросы минимизации затрат суммарной характеристической скорости, необходимой для обслуживания и восполнения спутниковых систем на некомпланарных круговых орбитах
- Системный синтез интеллектуальных систем управления космических аппаратов и комплексов
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||