научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 05, май 2012
DOI: 10.7463/0512.0403845
УДК 629.33
Россия, МГТУ им. Н.Э. Баумана
ОПЫТ СОЗДАНИЯ НАЗЕМНЫХ КОЛЕСНЫХ ТРАНСПОРТНЫХ СИСТЕМ С НЕТРАДИЦИОННЫМИ СХЕМАМИ РУЛЕВОГО УПРАВЛЕНИЯ
С каждым годом автомобиль становится всё более совершенным техническим объектом, в котором применяются электронные системы управления и алгоритмы, направленные на улучшение манёвренности автомобиля. Одним из направлений работ в этой области является применение в качестве управляемых, наряду с передними, ещё и задних колёс. Такое развитие напрямую связано с вопросами обеспечения безопасности, т. к. рост скоростей движения и, особенно, выполнения манёвров является очевидной тенденцией развития современного автомобилестроения. В связи с этим перед конструкторами и разработчиками встают всё новые задачи по поиску путей модернизации систем автомобиля, направленных на улучшение управляемости и устойчивости.
В своих работах отечественные учёные Я.М. Певзнер и А.С.Литвинов отмечают тот факт, что преимущество дополнительного применения задних управляемых колёс для улучшения поворотливости особенно очевидно для двухосных машин: радиус поворота ![]() уменьшается почти в два раза. Для четырёхосных колёсных машин с формулой
уменьшается почти в два раза. Для четырёхосных колёсных машин с формулой ![]() схемы рулевого управления (РУ) с передними и задними управляемыми колёсами снижают
схемы рулевого управления (РУ) с передними и задними управляемыми колёсами снижают ![]() в 1,6-1,9 раза по сравнению с управляемыми колёсами только передних осей.
в 1,6-1,9 раза по сравнению с управляемыми колёсами только передних осей.
Впервые схема со всеми управляемыми колёсами была применена на паровом автомобиле «Кота» в 1901 г. Однако, эта конструкция не нашла должного применения в своё время.
Известна информация о том, что ещё в 1909 году петербургский машиностроительный завод «Лесснер» собирался выпускать для армейских нужд шестиместный автомобиль с передними и задними управляемыми колёсами. Однако, по причине высокой стоимости (19 тыс. руб. по сравнению с 7,5 тыс. руб. за штабной «Руссо-Балт») завод заказ на производство не получил.
По мере развития автомобилестроения этот способ поворота получил распространение в разных странах. Его использовали фирмы-производители автомобилей в США, Англии, Германии, Дании, Швейцарии.
Одним из удачных примеров является создание фирмой «Даймлер-Бенц» бронированной разведывательной машины (БРМ) «Лухс» с колёсной формулой ![]() и всеми управляемыми колёсами (рис. 1) [1].
и всеми управляемыми колёсами (рис. 1) [1].
В середине 80-х годов швейцарской фирмой Эрилико была разработана колёсная зенитно-самоходная установка (ЗСУ) «Эскортер 35». Шасси было спроектировано западногерманской фирмой Гидрокран. Все четыре колеса машины ведущие и управляемые. Минимальный радиус поворота составляет 6,2 м (рис. 2) [1].
|
|
Рис. 1. БРМ «Лухс» |
Рис. 2. ЗСУ «Эскортер 35» |


В применении передних и задних управляемых колёс на легковых автомобилях лидерство принадлежит японским фирмам по причине чрезвычайного насыщения городов транспортными средствами и усложнившимися из-за этого условиями маневрирования.
В настоящее время автомобили со всеми управляемыми колёсами выпускаются японскими фирмами Nissan (SkylineGT-R), Honda (Prelude), Mazda (626), Mitsubishi (Galant и Sigma) и Toyota (Celica)).
Подробные алгоритмы функционирования их систем управления неизвестны, но можно выделить два основных подхода: в зависимости от скорости движения («Nissan», «Mitsubishi», «Mazda») или угла поворота рулевого колеса («Honda»).
Наиболее простую по устройству систему предложила «Honda». Кинематическая связь между передней и задней рулевыми рейками осуществляется механическим способом, а перемещение рулевых тяг задних колес задаётся эксцентриком согласующего механизма, заставляющим колеса поворачиваться при малых углах поворота рулевого колеса сначала в одну, а затем, по мере увеличения угла поворота руля, в другую сторону (рис. 3). Система «Honda» достаточно простая и недорогая, весит всего 15 кг, однако, ее эффективность и точность в работе далеки от идеала.
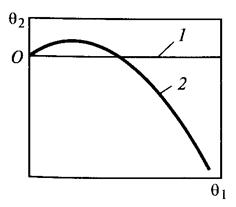
Рис. 3. Зависимость угла поворота задних колёс ![]() (кривая 2) от угла поворота передних
(кривая 2) от угла поворота передних ![]() (прямая 1), реализуемая РУ «Honda (Prelude)»
(прямая 1), реализуемая РУ «Honda (Prelude)»
Алгоритм работы системы управления с регулированием по скорости в общем случае состоит в следующем: на малых скоростях движения (до 30-50 км/ч), задние колёса повёрнуты в противофазе с передними на угол до 7 0 и синфазно при более высоких скоростях на 0,5 0.
В августе 1985 года компания «Nissan» первой в мире начала серийный выпуск автомобилей со всеми управляемыми колёсами, применив электро-гидравлическую систему под названием «Hicas» на автомобиле «Skyline».
Всем хороши были электронно-гидравлические системы образца 1980-х (даже «Honda» внедрила нечто подобное в 1991 году вместо своей механической системы), но их сложность и высокая стоимость стали серьезными препятствиями, ограничившими на долгие годы широкое распространение легковых автомобилей со всеми управляемыми колёсами.
В ряде случаев задние колёса легковых автомобилей делаются поворотными не столько для повышения манёвренности, сколько для подруливания при прохождении поворотов на высокой скорости или при перестроении с одной полосы движения на другую. Механический, гидравлический, или электрический рулевой приводы обеспечивают поворот задних колёс на небольшие углы (2-3 0) , что улучшает устойчивость движения.
В тенденции развития систем управления с приводом на все колёса (всеколесное рулевое управление - ВРУ) необходимо выделить несколько направлений [3].
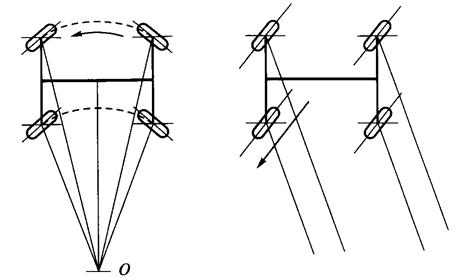
Одним из них является применение рулевого управления с подключаемым приводом на колёса задней оси. Идея функционирования таких конструкций заключается в том, что в большинстве случаев, т.е. в основных режимах автомобили управляются традиционным способом – за счёт поворота только передних колёс. Задние колёса подключаются либо автоматически, либо в тех случаях, когда маневрирование по тем или иным причинам затруднено (манёвренный режим), например при парковке. Обусловлено это тем, что автотранспортные средства с механическим приводом поворота задних колёс склонны к рысканью при движении по прямой и плохо управляются при входе в скоростные повороты. Данный режим, как уже отмечалось, позволяет совершать поворот с радиусом в два раза меньшим, чем при транспортном режиме, а также при включении реверса, осуществлять, так называемое, «крабовидное» движение, когда все колёса повёрнуты в одну сторону на один и тот же угол (рис. 4).
Другое направление – использование рулевого управления с приводом, постоянно действующим на все колёса. Такие системы, в свою очередь, можно подразделить на две группы: с «жёсткой» и «гибкой» геометрией поворота.
В системах рулевого управления с «жёсткой» геометрией поворота привод на определённые колёса, чаще всего на передние, одной или нескольких осей остаётся традиционным, механическим, а другие колёса управляются в соответствии с выбранным законом.
| |
а) | б) |
Рис. 4. Дополнительные возможности маневрирования при повороте задних колёс: | |
Такие системы дают возможность существенно повысить маневренность транспортных средств (ТС), сохраняя устойчивость движения на высоких скоростях. Однако следует отметить и их недостатки. Термин «жёсткая» геометрия говорит сам за себя: системы рулевого управления с таким приводом осуществляют неизменный во всех случаях алгоритм работы, который определяет однозначную связь поворота всех колёс автомобиля с углом поворота рулевого колёса (задатчика) вне зависимости от условий движения.
«Гибкая» геометрия, в свою очередь, характеризуется таким алгоритмом работы системы рулевого управления, при котором возможно получить широкий спектр способов поворота автомобиля (рис. 5). Например, за счёт только передних или только задних колёс, «крабовидное» движение, поворот относительно середины базы и др. Для обеспечения функционирования такого управления необходим автономный силовой привод каждого из колёс и бортовой вычислитель, в функцию которого входит расчёт воздействия на привод в зависимости от необходимой кинематики поворота.
Областью применения таких схем управления в настоящее время является пока только специальная колёсная техника. Серийно выпускаются шасси для перевозки крупногабаритных грузов, установки кранового оборудования фирмами «Кометто», «Като», «Шайерле» и др.

Рис. 5. Схемы поворота, реализуемые рулевым управлением многоопорного ТС «Кометто»:
а – «классический» поворот; б – боковой поворот; в – центральный поворот; г, д – «крабовый ход»
ЗАКОНЫ И АЛГОРИТМЫ ВСЕКОЛЕСНОГО РУЛЕВОГО УПРАВЛЕНИЯ
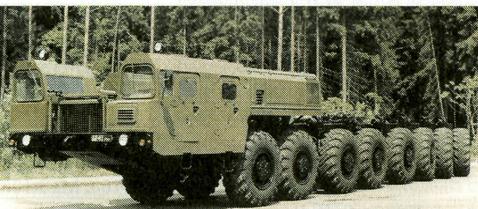
Вопросы создания алгоритмов всеколёсного управления всегда входили в область интересов отечественных учёных. В 1990-е годы в МГТУ им. Н.Э. Баумана совместно с НИИИ 21 МО РФ был создан макетный образец шасси МЗКТ 79085 (![]() ) со всеми управляемыми колесами, способный поворачивать относительно произвольного полюса поворота. Поворот колес на этом макете осуществляется электрогидравлическим следящим приводом. На этом макете была реализована система рулевого управления с «гибкой» геометрией, разработанная на кафедре «Колесные машины» МГТУ им. Н.Э. Баумана.
) со всеми управляемыми колесами, способный поворачивать относительно произвольного полюса поворота. Поворот колес на этом макете осуществляется электрогидравлическим следящим приводом. На этом макете была реализована система рулевого управления с «гибкой» геометрией, разработанная на кафедре «Колесные машины» МГТУ им. Н.Э. Баумана.
В результате проведенных научных исследований был разработан алгоритм управления поворотными колёсами. В зоне, соответствующей малым углам поворота рулевого колеса, т. е. движению близкому к прямолинейному, что обычно характерно для высоких скоростей движения, машина имеет малую чувствительность к управлению и, следовательно, высокую курсовую устойчивость движения. При больших углах поворота рулевого колеса маневренные свойства резко увеличиваются.
Основная же задача алгоритма и разработанной на его основе программы управления согласовать между собой углы поворота каждого из колес при выбранном способе управления. Этого позволяет добиться задатчик положения полюса поворота, который выполнен таким образом, что имеется возможность непрерывно изменять его положение (а не дискретно, как, например, у «Кометто»). В свою очередь применяемый алгоритм становится универсальным, способным реализовать практически любой способ управления транспортным средством.
Выбор такого закона управления основан на результатах большого числа теоретических исследований и практике зарубежных и отечественных автомобильных фирм, а также расчетах, проведенных для различных видов этих законов Н.М. Назаровым и В.Г. Корниловым [4, 7]. По результатам предварительных исследований было предложено остановиться двух вариантах закона управления.
В первом варианте регулирование соотношения углов поворота передних и задних колес осуществляется в зависимости от угла поворота передних колес и скорости движения (далее закон «РСП УС»). На большой скорости при малых углах поворота передних колес, колеса задних осей поворачиваются в ту же сторону, что и передние (синфазно). По мере увеличения кривизны траектории и уменьшения скорости движения колеса задних осей поворачиваются в противоположную сторону относительно передних (в противофазе). Зависимость смещения полюса поворота ![]() для данного случая имеет вид:
для данного случая имеет вид:
| (1) |

где ![]() - коэффициент, характеризующий исходное смещение полюса «внутрь» базы;
- коэффициент, характеризующий исходное смещение полюса «внутрь» базы;  - коэффициент, характеризующий смещение полюса за пределы базы;
- коэффициент, характеризующий смещение полюса за пределы базы; ![]() и
и ![]() – параметры, введённые для исследовательских целей;
– параметры, введённые для исследовательских целей; ![]() - максимальный угол поворота задающего колеса, обусловленный конструктивными ограничениями;
- максимальный угол поворота задающего колеса, обусловленный конструктивными ограничениями; ![]() - угол задающего колеса (средний угол на передней оси);
- угол задающего колеса (средний угол на передней оси); ![]() - максимально возможная скорость движения;
- максимально возможная скорость движения; ![]() - линейная скорость автомобиля.
- линейная скорость автомобиля.
Другой вариант отличается тем, что регулирование соотношения углов поворота передних и задних колес по скорости отсутствует (далее закон «РСП У»). При функционировании данного закона смещение полюса поворота автомобиля ![]() вдоль его базы
вдоль его базы ![]() осуществляется в зависимости от задающего угла
осуществляется в зависимости от задающего угла ![]() :
:
| (2) |
Графически варианты смещения полюса поворота вдоль базы автомобиля при разных законах функционирования системы (гиперболическом, линейном и параболическом) представлены на рис. 6. Пунктирными линиями выделен случай с наличием синфазного поворота колёс всех осей.
Следует отметить, что отечественные конструкторы и ранее обращались к схемам с передними и задними управляемыми осями. Лидерство в этом направлении принадлежит специальному конструкторскому бюро (СКБ) под руководством главного конструктора Грачёва В.А., созданному на АМО «ЗИЛ».
В 1957 году с целью проверки новых конструктивных решений был создан макетный образец автомобиля ЗИЛ-157 Р с колёсной формулой ![]() , равномерным расположением осей по базе и формулой рулевого управления
, равномерным расположением осей по базе и формулой рулевого управления ![]() . В начале 60-х годов спроектирован и изготовлен образец снегоболотохода ЗИЛ-132. В 1963 году создан опытный образец снегоболотохода ЗИЛ-Э167, испытания которого были проведены в сложных условиях строительства нефтепровода в Тюменской области и дали положительные результаты.
. В начале 60-х годов спроектирован и изготовлен образец снегоболотохода ЗИЛ-132. В 1963 году создан опытный образец снегоболотохода ЗИЛ-Э167, испытания которого были проведены в сложных условиях строительства нефтепровода в Тюменской области и дали положительные результаты.
Экспериментальные исследования СКБ ЗИЛ в области создания вездеходов привели к появлению нового подкласса машин специального назначения – поисково-эвакуационные установки (ПЭУ), которые были в дальнейшем созданы и также имели схему РУ ![]() .
.

Рис. 6. Варианты управления смещением полюса РУ
В 1975 году с такой же схемой РУ для поиска спускаемых аппаратов, эвакуации космонавтов и других целей был создан поисково-эвакуационный комплекс «Синяя птица» на базе транспортёра «ЗИЛ-4906» и плавающего транспортёра «ЗИЛ-49061».
В 1992 году по заданию МЧС и ГО РФ ОАО «Вездеход ГВА», созданное при ЗИЛе в 90-х годах, разработало аварийно-спасательные машины ЗИЛ-4972, ЗИЛ-497205, ЗИЛ-4975 для различных нужд аварийно-спасательных формирований. Для большей манёвренности в стеснённых условиях движения задние колёса выполнены управляемыми.
Плавающий образец ЗИЛ-135Б с колёсной формулой ![]() , с разнесёнными задними и сближенными средними осями и формулой РУ
, с разнесёнными задними и сближенными средними осями и формулой РУ ![]() положил начало созданию машин под монтаж различных комплексов вооружения. Наиболее конструктивно отработанным явилось рамное шасси ЗИЛ-135 ЛМ. Маятниковые рычаги передней и задней трапеций связаны в нём продольной тягой. В 70-х кодах ЗИЛ совместно с Новосибирским НИИ комплексного электропривода создал макетный образец, в котором поворот передних и задних колёс осуществлялся без механической связи за счёт электропривода. В 1965 г. производство шасси ЗИЛ-135ЛМ было передано на Брянский автомобильный завод, который успешно продолжил создание автомобилей с задними управляемыми осями [2].
положил начало созданию машин под монтаж различных комплексов вооружения. Наиболее конструктивно отработанным явилось рамное шасси ЗИЛ-135 ЛМ. Маятниковые рычаги передней и задней трапеций связаны в нём продольной тягой. В 70-х кодах ЗИЛ совместно с Новосибирским НИИ комплексного электропривода создал макетный образец, в котором поворот передних и задних колёс осуществлялся без механической связи за счёт электропривода. В 1965 г. производство шасси ЗИЛ-135ЛМ было передано на Брянский автомобильный завод, который успешно продолжил создание автомобилей с задними управляемыми осями [2].
В разные годы Брянским автомобильным заводом были выпущены такие шасси, как БАЗ-135МБ с РУ ![]() под дистанционно-пилотный летательный аппарат «Рейс», плавающие специальные колесные шасси (СКШ) БАЗ-5937, 5938, 5939 и БАЗ-5921, 5922 под монтаж зенитно-ракетного комплекса «Оса» и тактического ракетного комплекса «Точка» со схемой рулевого РУ
под дистанционно-пилотный летательный аппарат «Рейс», плавающие специальные колесные шасси (СКШ) БАЗ-5937, 5938, 5939 и БАЗ-5921, 5922 под монтаж зенитно-ракетного комплекса «Оса» и тактического ракетного комплекса «Точка» со схемой рулевого РУ ![]() .
.
Общий вид некоторых объектов, в конструкции которых применены передние и задние управляемые колёса представлен рис. 8.
В настоящее время на вооружении в ВС РФ находится достаточно большое количество специальных колёсных шасси с передними и задними управляемыми колёсами таких модификаций, как БАЗ-5937, БАЗ-5939, ЗИЛ-135ЛМ, БАЗ-135МБ, МЗКТ-79221.
Главным недостатком таких автомобилей, что было выявлено в результате теоретических и экспериментальных исследований, проведённых ведущими учёными Д.А. Антоновым, П.В. Аксёновым, Я.Е. Фаробиным и др., является низкая устойчивость движения, особенно при переходных процессах [5, 6]. Известно, что в начале поворота возникают силы, деформирующие шины передних и задних колёс в противоположных направлениях. При этом на передних колёсах создаются стабилизирующие, а на задних -дестабилизирующие моменты. Одновременно при входе в поворот возникают центробежные силы, увеличивающие стабилизирующие моменты на передних колёсах и уменьшающие (до нуля) дестабилизирующие, а затем, создающие стабилизирующие силы на задних колёсах. Эти кратковременные импульсы боковых реакций воспринимаются шинами как ударная нагрузка, способная привести в определенных условиях к потере сцепления колес с опорной поверхностью в боковом направлении и заносу. Таким образом, переменные по величине и направлению боковые реакции, возникающие на задних управляемых колёсах, усложняют управление автомобилем в связи с необходимостью постоянной корректировки движения и, соответственно, повышенным вниманием водителя.
Одним из способов борьбы с этим явлением может служить применение запаздывания поворота колес задних осей относительно передних на угол около 0,1 рад (5 0…6 0) [5, 6]. Важно подчеркнуть, что главная идея состоит именно в обеспечении запаздывания, а не простого отставания поворота задних колёс (одновременный поворот с меньшей скоростью). Однако такое конструктивное решение ведет к рассогласованию кинематики поворота из-за того, что колеса задних управляемых осей практически во всем диапазоне углов поворота образуют свой мгновенный центр поворота ![]() ,
, ![]() , а единый центр поворота с колесами передних осей
, а единый центр поворота с колесами передних осей ![]() образуется за счет дополнительного увода шин (рис. 7). Дополнительным минусом является и то, что скорость нарастания поворота задних колёс оказывается выше, чем у передних. Это необходимо для обеспечения кинематики поворота без скольжения при обеспечении минимального радиуса поворота.
образуется за счет дополнительного увода шин (рис. 7). Дополнительным минусом является и то, что скорость нарастания поворота задних колёс оказывается выше, чем у передних. Это необходимо для обеспечения кинематики поворота без скольжения при обеспечении минимального радиуса поворота.
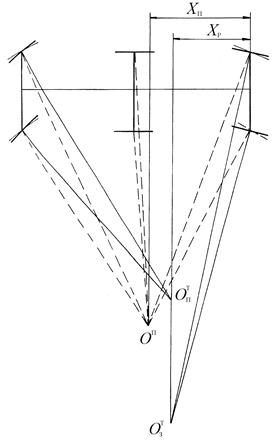
Рис. 7. Кинематика поворота
При реализации данного закона поворот колёс задней оси начинается при превышении задающим колесом передней оси некоторого порогового угла, называемого углом запаздывания ![]() . Угол поворота колёс задней оси определяется по зависимости
. Угол поворота колёс задней оси определяется по зависимости
| (3) |
Задача модернизации автомобилей или создания новых на их базе с применением всеколёсного рулевого управления подразумевает под собой отказ от существующих рулевых трапеций и создание автономного привода управления каждым колесом в отдельности.
|
|
|
|
ЗИЛ-157 Р | ЗИЛ-132 | ПЭУ-1 |
|
|
|
|
|
ЗИЛ-49061 | ЗИЛ-136 | ЗИЛ-135 ЛМ |
|
|
|
|
|
ЗИЛ-Э167 | ЗИЛ-4975 | ЗИЛ-497205 |
|
|
| ||
БАЗ-5922 | |||
| |||
МЗКТ-79221 | |||
| |||
ЗИЛ-135 П | |||
| |||
БАЗ-5937 | БАЗ-135 ЛМП | ||
Рис. 8. Примеры автомобилей, в конструкции которых колеса задних осей являются поворотными | |||













Таким образом, несмотря на большой интерес к применению задних управляемых колёс, в наибольшей степени за счет возможности улучшения манёвренности, господствующим это направление до сих пор не стало. Тем не менее, этот интерес не только не ослабевает, но и усиливается с каждым годом, в том числе и в нашей стране. В этой связи, одно из перспективных направлений развития автомобилестроения заключается в разработке оригинальных универсальных алгоритмов функционирования систем всеколёсного рулевого управления, направленной на повышение управляемости и устойчивости автомобиля. Отметим, что в последние годы данное направление активно развивается на кафедре «Колесные машины» МГТУ им. Н.Э. Баумана, в том числе, и в рамках проводимых НИР и ОКР.
Представленные законы ВРУ были реализованы в среде имитационного математического моделирования. В ходе теоретических исследований динамики колесных машин с различной колесной формулой проверена эффективность законов ВРУ для обеспечения устойчивости движения при одновременном увеличении скорости выполнения маневров в сравнении с традиционными схемами РУ [8].
На основе анализа полученных в ходе имитационного математического моделирования движения КМ результатов были сделаны следующие выводы.
Закон с регулированием смещения полюса РУ в зависимости от угла поворота рулевого колеса и скорости движения является более прогрессивным в сравнении со всеми другими законами. Однако результаты математического моделирования автомобилей с колесными формулами 6×6 и 8×8 при различных законах управления доказывают, что закон «РСП УС» какого-либо ощутимого преимущества по предельной скорости выполнения маневров в сравнении, например, с законом «РСП У», достичь не позволяет. В то же время применение закона «РСП УС» значительно повышает требования к квалификации водителя по следующей причине. При различной скорости движения поворот водителем рулевого колеса на один и тот же угол приводит к движению автомобиля по траекториям различной кривизны. Привыкание водителя к такому «поведению» автомобиля – это объективно очень трудоемкий процесс. При одновременном отсутствии преимущества по предельным скоростям выполнения маневров, целесообразность использования закона «РСП УС» подтверждений не находит.
В то же время выявлено, что в законы «РСП У» и «РСП УС» позволяют существенно повысить безопасность выполнения маневров в сравнении с традиционными схемами РУ, в частности, когда полюс РУ находится в центре базы автомобиля. Таким образом, напрашивается вывод о том, что наиболее предпочтительным является закон со смещением полюса РУ в зависимости от угла поворота рулевого колеса – «РСП У».
В [9] предлагается оригинальный закон управления поворотом колес задней оси (или нескольких задних осей). Доказана эффективность этого закона для автомобилей со схемами РУ 1-0-3 и 1-00-4. Отметим, что в данном случае речь идет скорее о подруливании задними осями для повышения устойчивости против заноса. В случае всеколесного рулевого управления, особенно при одновременном применении индивидуального привода всех движителей, эффективность предлагаемого закона резко снижается, что выявлено в результате теоретических исследований.
По результатам математического моделирования можно также отметить, что по обеспечению устойчивости против опрокидывания законы поворота колес ВРУ не дают преимуществ в сравнении с другими схемами рулевого управления. При движении с одинаковой заданной скоростью к опрокидыванию приводят моменты сил, обусловленных боковым ускорением. Таким образом, от варианта схемы РУ предельная скорость выполнения маневра по критерию опрокидывания зависеть не может.
Одно из возможных решений для обеспечения безопасности движения автомобиля с целью исключения опрокидывания на высоких скоростях является автоматизация поворота колес. Проведенные исследования в данном направлении позволили сделать следующий вывод: безусловно, за счет автоматизации поворота колес добиваться повышения безопасности возможно (например, запрещать поворот колес при достижении величиной бокового ускорения допустимых пределов или выполнять так называемый «управляемый занос»), однако, данные решения исключают из процесса управления машиной водителя, что в ряде случаев может иметь гораздо более худшие последствия - это во-первых, а во-вторых, возрастают требования к подготовке водителя для управления такими транспортными средствами.
По результатам исследований в [8,9] доказано, что наиболее эффективным вариантом для повышения безопасности движения при выполнении маневров высокомобильных колесных транспортных средств является автоматическое ограничение использования мощности силовой установки. В [9] представлен закон коррекции скорости движения транспортного средства, основанный на нечеткой логике. В то же время, управление поворотом колес при ВРУ должно быть операцией, контролируемой водителем во всем диапазоне движения, но при этом по возможности максимально эффективной с точки зрения обеспечения управляемости и устойчивости.
Проведем анализ закона «РСП У» более подробно. Как уже отмечалось, для повышения устойчивости при начале маневрирования все колеса в данном случае поворачиваются синфазно в одну сторону. Идея авторов понятна, однако необходимость такого решения для многоосной техники вызывает сомнение. Можно отметить, что с увеличением числа осей автомобиля опасность потери устойчивости при начале переходного процесса снижается. При маневрировании на малых скоростях поворот всех колес в одну сторону при малых углах поворота рулевого колеса также не способствует повышению эффективности управления транспортным средством. Синфазный поворот при малых углах поворота руля скорее необходим для небольших двухосных легковых автомобилей.
ВЕЕРНЫЙ ЗАКОН ВРУ
По результатам многочисленных вычислительных экспериментов был сформулирован закон изменения положения полюса рулевого управления от величины задающего угла для автомобиля 8×8 [10]:
| (4) |

При этом на ВРУ накладываются следующие ограничения: при положении угла поворота задающего колеса до 5о (![]() ) полюс рулевого управления находится на задней (последней) оси автомобиля (рис. 9); в то время, когда полюс РУ лежит за осью № 3, колеса этой оси остаются строго в нейтральном положении, поворот их начинает реализовываться только при достижении полюса РУ координаты положения оси №3 по базе (рис. 9). Таким образом, достигается устойчивость против заноса при высоких скоростях движения и обеспечивается устранение смены направления в углах поворота колес третьей оси. Из-за особенностей функционирования данный закон получил название «веерный».
) полюс рулевого управления находится на задней (последней) оси автомобиля (рис. 9); в то время, когда полюс РУ лежит за осью № 3, колеса этой оси остаются строго в нейтральном положении, поворот их начинает реализовываться только при достижении полюса РУ координаты положения оси №3 по базе (рис. 9). Таким образом, достигается устойчивость против заноса при высоких скоростях движения и обеспечивается устранение смены направления в углах поворота колес третьей оси. Из-за особенностей функционирования данный закон получил название «веерный».
При увеличении числа осей колесной машины больше четырех величина угла ![]() должна постепенно уменьшаться до нулевого значения. Задние оси, углы поворота которых будут равны нулю пока полюс РУ не достигнет их координаты по базе автомобиля, будут препятствовать началу заноса задней оси. Соответственно, чем больше осей находятся в таком режиме, тем выше устойчивость автомобиля в целом.
должна постепенно уменьшаться до нулевого значения. Задние оси, углы поворота которых будут равны нулю пока полюс РУ не достигнет их координаты по базе автомобиля, будут препятствовать началу заноса задней оси. Соответственно, чем больше осей находятся в таком режиме, тем выше устойчивость автомобиля в целом.

Рис. 9. Схема поворота колесной машины при «веерном» законе ВРУ
МАТЕМАТИЧЕСКАЯ МОДЕЛЬ ДВИЖЕНИЯ КОЛЕСНОЙ МАШИНЫ
При описании математической модели движения колесной машины (КМ) были выбраны следующие допущения. Движение КМ как твердого тела рассматривается в горизонтальной плоскости на ровной, с учетом угла подъема в направлении движения, недеформируемой опорной поверхности и складывается из поступательного движения центра масс и вращательного движения вокруг центра масс (рис. 10). Система уравнений, описывающая данное движение, позволяет рассчитать текущие ускорения по значениям сил и моментов, действующим на КМ:
| (5) |

где m– масса КМ; Jz– момент инерции КМ относительно оси z; ![]() – вектор скорости центра масс КМ;
– вектор скорости центра масс КМ; ![]() – вектор ускорения центра масс КМ (абсолютная производная от вектора скорости центра масс автомобиля);
– вектор ускорения центра масс КМ (абсолютная производная от вектора скорости центра масс автомобиля); ![]() – относительная производная от вектора скорости центра масс КМ;
– относительная производная от вектора скорости центра масс КМ; ![]() – вектор угловой скорости поворота КМ; θ - угол поворота КМ относительно оси
– вектор угловой скорости поворота КМ; θ - угол поворота КМ относительно оси ![]() ;
; ![]() ,
, ![]() – координаты центра масс КМ в неподвижной системе координат;
– координаты центра масс КМ в неподвижной системе координат; ![]() – вектор силы взаимодействия с грунтом, действующей на i-ое колесо;
– вектор силы взаимодействия с грунтом, действующей на i-ое колесо; ![]() – вектор силы сопротивления воздуха; Mпкi– момент сопротивления повороту i-го колеса;
– вектор силы сопротивления воздуха; Mпкi– момент сопротивления повороту i-го колеса; ![]() – угол преодолеваемого подъема.
– угол преодолеваемого подъема.
Для описания данного случая движения КМ вводятся следующие системы координат: неподвижная ![]() ; подвижная
; подвижная ![]() , связанная с корпусом КМ; система координат
, связанная с корпусом КМ; система координат ![]() , связанная с i-м колесом (рис. 10).
, связанная с i-м колесом (рис. 10).
Рис. 10. Расчетная схема криволинейного движения КМ 8×8
Детально представленная математическая модель рассмотрена в [8]. К ее особенностям следует отнести индивидуальный привод движителей [11–13].
РЕЗУЛЬТАТЫ МОДЕЛИРОВАНИЯ
Ниже представлены результаты численного моделирования движения колесной машины 8×8 с индивидуальным приводом всех движителей [8, 9] с реализацией рассмотренных законов всеколесного рулевого управления с целью определения предельной скорости выполнения манёвра «поворот R=25 м». Рассматривается движение при двух законов ВРУ: «РСП УС» и «Веерный» закон.
Методика проведения испытаний заключается в следующем. При минимальной скорости КМ был подобран необходимый для движения с требуемым радиусом угол поворота рулевого колеса. На режиме «ползучей» скорости (![]() 5 км/ч) вводим модель КМ в режим криволинейного движения и подбираем задающий угол, необходимый для выполнения манёвра. Далее увеличиваем скорость от заезда к заезду (на 1-3 км/ч) с целью определения предельной скорости. Манёвр считается выполненным, если фактический радиус поворота не превышает значения теоретического на 5 %. КМ первые 2 сек. двигается прямо без воздействия «водителя» на рулевое колесо. В дальнейшем задается закон изменения поворота первого «условного» колеса, находящегося в центре первой оси, путем воздействия на условное рулевое колесо. Начальная скорость движения, равная предельной по условиям выполнения маневра, поддерживается постоянной.
5 км/ч) вводим модель КМ в режим криволинейного движения и подбираем задающий угол, необходимый для выполнения манёвра. Далее увеличиваем скорость от заезда к заезду (на 1-3 км/ч) с целью определения предельной скорости. Манёвр считается выполненным, если фактический радиус поворота не превышает значения теоретического на 5 %. КМ первые 2 сек. двигается прямо без воздействия «водителя» на рулевое колесо. В дальнейшем задается закон изменения поворота первого «условного» колеса, находящегося в центре первой оси, путем воздействия на условное рулевое колесо. Начальная скорость движения, равная предельной по условиям выполнения маневра, поддерживается постоянной.
Маневр выполняется на опорном основании «грунтовое основание» (с коэффициентом взаимодействия движителя с опорным основанием при полном буксовании μsmax=0,6), ![]() =5
=5 ![]() ;
; ![]() =32
=32 ![]() . Высота центра масс КМ находится на расстоянии 2,5 м от дорожной поверхности.
. Высота центра масс КМ находится на расстоянии 2,5 м от дорожной поверхности.
Закон управления – «РСП УС».
На рис. 11-18 представлены результаты движения КМ при законе «РСП УС».
Цифрами на графиках обозначена принадлежность каждой зависимости к соответствующему колесу КМ.

Рис. 11. Траектория движения КМ 8×8
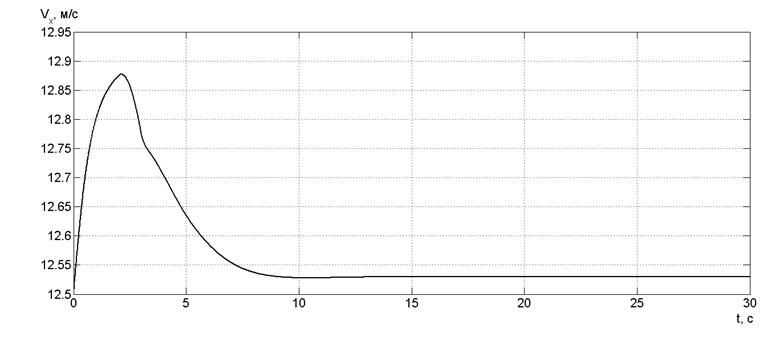
Рис. 12. Скорость движения КМ 8×8. Максимальная скорость 45 км/ч
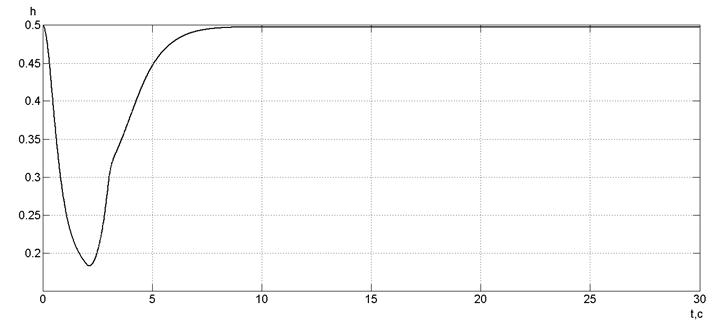
Рис. 13. Изменение положения педали «газ» КМ 8×8
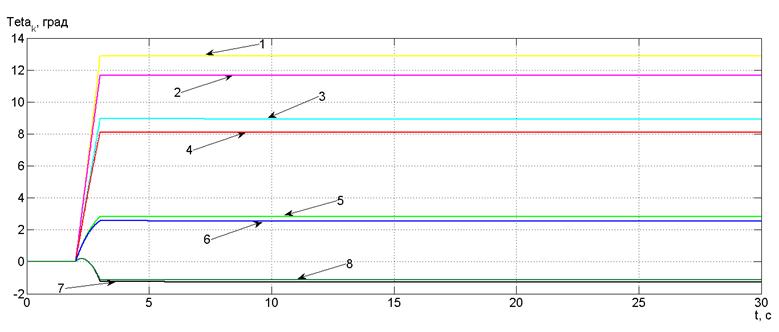
Рис. 14. Углы поворота колес КМ 8×8
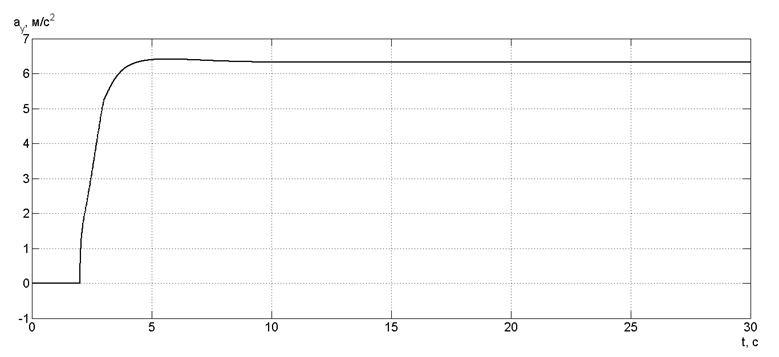
Рис. 15. Боковое ускорение центра масс КМ 8×8
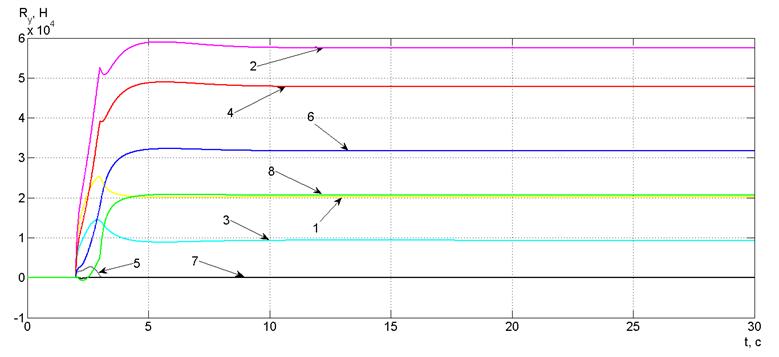
Рис. 16. Боковые реакции на колесах КМ 8×8

Рис. 17. Вертикальные реакции на колесах КМ 8×8
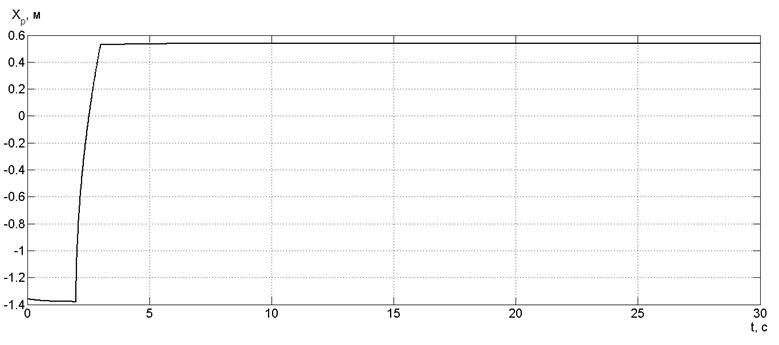
Рис. 18. Изменение положение полюса рулевого управления КМ 8×8
Закон управления – «Веерный».
На рис. 19-26 представлены результаты движения КМ при «Веерном законе» ВРУ.
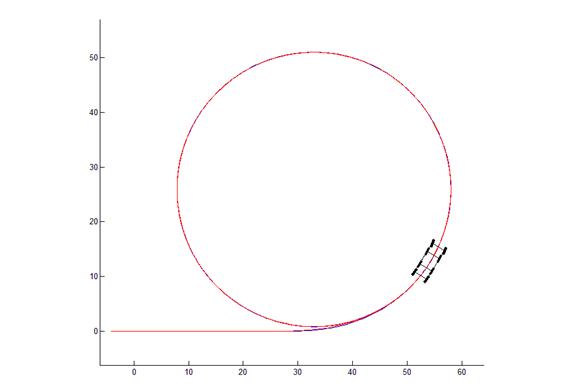
Рис. 19. Траектория движения КМ 8×8
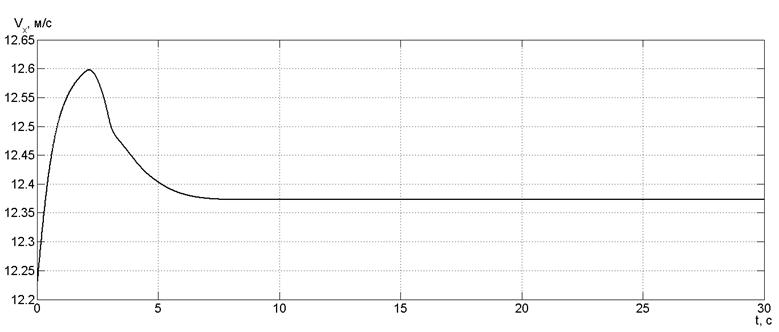
Рис. 20. Скорость движения КМ 8×8. Максимальная скорость 44 км/ч
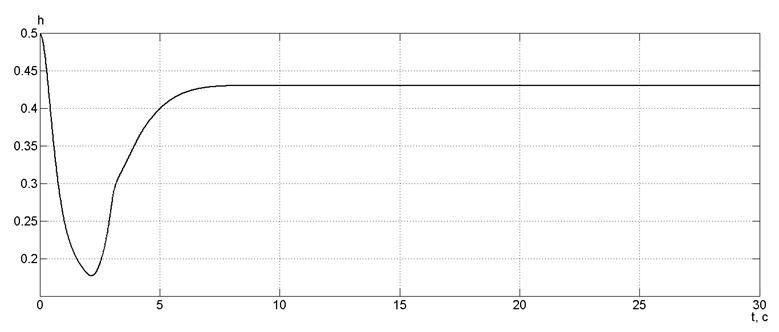
Рис. 21. Изменение положения педали «газ» КМ 8×8

Рис. 22. Углы поворота колес КМ 8×8
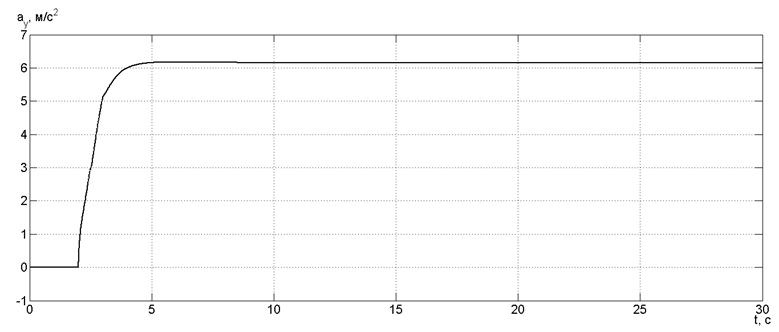
Рис. 23. Боковое ускорение центра масс КМП 8×8

Рис. 24. Боковые реакции на колесах КМ 8×8
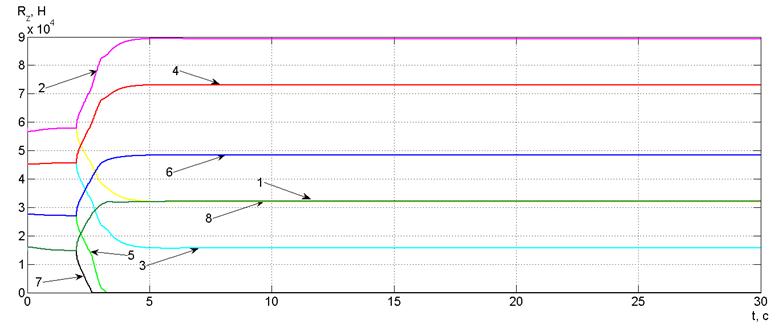
Рис. 25. Вертикальные реакции на колесах КМ 8×8
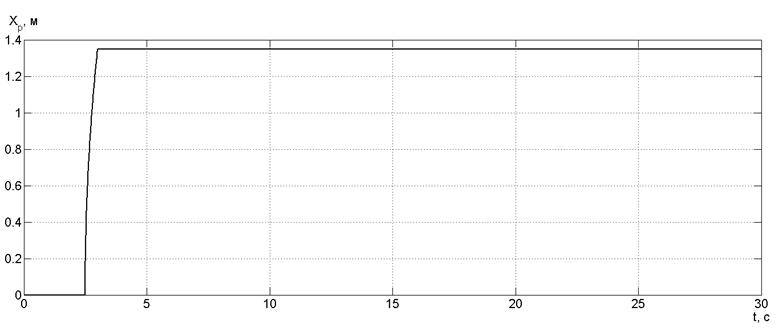
Рис. 26. Изменение положения полюса рулевого управления КМ 8×8
Заключение
Анализ представленных результатов позволил сделать следующие выводы. В случае, когда центр тяжести расположен достаточно высоко, КМ в первую очередь склонна к потере устойчивости по опрокидыванию. При высоте центра масс 2,5 м во всех режимах движения при всех исследуемых законах потери устойчивости по заносу не зафиксировано. Анализ рис. 17 и 25 подтверждает данное положение: КМ выполняет маневр практически с отрывом некоторых колес от опорной поверхности, что свидетельствует о наступлении опасной ситуации. Как уже отмечалось, в таком случае предельная скорость выполнения маневра при всех законах, в том числе, при фиксированном положении полюса рулевого управления на базе КМ, будет приблизительно одинаковой (при движении с одинаковой заданной скоростью к опрокидыванию приводят моменты сил, обусловленных боковым ускорением, таким образом, от варианта схемы РУ предельная скорость выполнения маневра по критерию опрокидывания зависеть не может).
В то же время при сравнении результатов моделирования при законе РСП УС и «Веерном» законе можно отметить, что предельная скорость для выполнения маневра Поворот R=25 м практически одинаковая (44 и 45 км/ч), при этом величина бокового ускорения в центре масс при «веерном» законе несколько ниже (рис. 15 и 23). Анализ траекторий КМ при двух законах ВРУ свидетельствует о лучшем совпадении траекторий передней и задней осей при «веерном» законе в сравнении с законом РСП УС. Учитывая также сложности обучения и привыкания водителя к управлению КМ при законе РСП УС, целесообразность реализации в сравнении с «Веерным» законом подтверждения не находит.
Перечень испытаний транспортных средств, определенный ГОСТ Р 52302-2004 «Автотранспортные средства. Управляемость и устойчивость. Технические требования. Методы испытаний», не ограничивается только маневром поворот с фиксированным радиусом. В этой связи были проведены вычислительные эксперименты по различным видам маневров: переставка, рывок руля, поворот с различным радиусом.
Результаты теоретических исследований криволинейного движения колесной машины 8×8 при «веерном» законе управления поворотом колёс подтвердили работоспособность закона и эффективность для обеспечения устойчивости и управляемости в сравнении с известными и исследованными ранее законами.
Разработанный закон применим для многоосных колесных транспортных средств независимо от числа осей, но для каждого отдельного случая требуется некоторая корректировка закона, учитывающая размеры транспортного средства и расположение осей по базе.
СПИСОК ЛИТЕРАТУРЫ
1. Колесная бронетехника. Иллюстрированный справочник / М.В. Никольский, В.Е. Ильин. – М.: ООО «Издательство Астрель»: ООО «Издательство АСТ», 2001. – 512 с.: ил. – (Военная техника).
2. Тенденции развития специальных колесных шасси и тягачей военного назначения. Информационно-технический сборник / В.В. Шипилов, А.П. Поскачей, А.А. Шелест и др.; под ред. В. А. Полонского. - Бронницы: 21 НИИИ, 2007. - 417 с.
3. Белоусов Б.Н., Попов С.Д. Колесные транспортные средства особо большой грузоподъемности. Конструкция. Теория. Расчет / под общ. ред. Б.Н. Белоусова. – М.: Изд-во МГТУ им. Н.Э. Баумана, 2006. – 728 с.: ил.
4. Горелов В.А., Наумов В.Н. Всеколесное управление: поворот к маневренности // Мир транспорта. - 2008. - № 2. - С. 28-35.
5. Аксенов П.В. Многоосные автомобили. – М.: Машиностроение, 1980. – 206 с.
6. Антонов Д.А. Теория устойчивости движения многоосных автомобилей. – М.: Машиностроение, 1978. – 216 с.
7. Корнилов В.Г. Повышение маневренности и устойчивости движения многоосных шасси: дисc. канд. техн. наук: 05.05.03 . – М., 1992. – 210 с.
8. Горелов В.А. Прогнозирование характеристик криволинейного движения полноприводного автомобиля с формулой рулевого управления 1-0-3 при различных законах управления колёсами задней оси: дисc. канд. техн. наук: 05.05.03 . – М.: МГТУ им. Н.Э. Баумана, 2008. – 200 с.
9. Горелов В.А. Разработка алгоритма управления поворотом колёс задней оси автомобиля с применением нечёткой логики (Fuzzy Logic) при формуле рулевого управления 1-0-3 // Изв. ВУЗов. Машиностроение. - 2008. - № 2. - С. 81-91.
10. Горелов В.А., Котиев Г.О., Тропин С.Л. «Веерный» закон для всеколесного рулевого управления многоосных колесных транспортных средств // Вестник МГТУ им. Н.Э. Баумана. Сер. Машиностроение. - 2012. - № 2. - С. 102-116.
11. Котиев Г.О., Горелов В.А., Мирошниченко А.В. Синтез системы управления тяговыми электродвигателями для индивидуального привода ведущих колес автомобиля // Наука и образование. МГТУ им. Н.Э. Баумана. Электрон. журн.– 2011. – №12. – Режим доступа:http://technomag.edu.ru/doc/282533.html (дата обращения 20.08.2012).
12. Горелов В.А., Котиев Г.О., Мирошниченко А.В. Разработка закона управления индивидуальным приводом движителей многоосной колесной машины // Изв. ВУЗов. Машиностроение. - 2012. - № 1. – С. 49-59.
13. Горелов В.А., Котиев Г.О., Мирошниченко А.В. Алгоритм управления индивидуальным приводом колесных движителей транспортных средств // Вестник МГТУ им. Н.Э. Баумана. Сер. Машиностроение. - 2011. – Спец. вып. «Энергетическое и транспортное машиностроение». - С. 39-58.
Публикации с ключевыми словами: эксперимент, устойчивость, математическая модель, имитационное моделирование, управляемость, поворот, кривизна траектории, адекватность, закон управления, колесная машина
Публикации со словами: эксперимент, устойчивость, математическая модель, имитационное моделирование, управляемость, поворот, кривизна траектории, адекватность, закон управления, колесная машина
Смотри также:
- 77-30569/343394 Математическое моделирование движения многозвенных колесных транспортных комплексов с учетом особенностей конструкций сцепных устройств
- Алгоритм работы системы динамической стабилизации для автомобиля 4х4 с подключаемой задней осью
- Разработка закона распределения моментов по колесам многоосной колесной машины с электро-механической трансмиссией, выполненной по схеме «мотор-ось»
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||