научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 03, март 2012
УДК. 62-541
МГТУ им. Н.Э. Баумана
Введение
В настоящее время в мировом автомобилестроении в связи с повышением эксплуатационных скоростей и использованием пневматических и гидропневматических подвесок имеется тенденция ко все более широкому распространению управляемых систем подрессоривания.
Можно выделить две больших группы регулируемых подвесок, различающихся по быстродействию: со статическим и с динамическим регулированием.
Под статическим регулированием (регулирование производится по осредненным значениям параметров) понимается изменение параметров пассивных элементов подвески при изменении условий движения автомобиля с целью адаптации системы подрессоривания многоосной колесной машины (МКМ)к этим новым условиям движения. Под условиями движения можно понимать скорость, загрузку, качество дорожной поверхности и др. В стационарном режиме, т.е. когда условия движения не меняются, регулирование не производится. Таким образом, цель статического регулирования – обеспечение оптимального соответствия параметров пассивных элементов подвески каждому стационарному режиму движения.
Под динамическим регулированием (регулирование по мгновенному значению параметра) в данной работе понимается управление колебаниями подрессоренной массы посредством переменного во времени дополнительного силового воздействия на корпус автомобиля со стороны подвески. Конкретное значение данного компенсирующего силового воздействия в каждый момент времени определяется алгоритмом, по которому осуществляется гашение колебаний. Это силовое воздействие может создаваться либо специальными активными элементами в подвеске, работающими от внешнего источника энергии, либо изменением параметров пассивных элементов подвески. Системы с динамическим регулированием и подводом энергии извне известны как активные подвески, а с регулированием текущих значений параметров пассивных элементов - как полуактивные. Обзоры работ по активным подвескам автомобилей приводятся в работах [1, 2]. Теоретические аспекты активных виброзащитных систем для общего случая подрессоривания твердого тела, а также частных случаев, например для подвески сиденья водителя, исследовали многие ученые: Балагула В.Я., Гайцгори М.М., Генкин М.Д., Яблонский В.В., Елисеев С.А, Иносов С.В., Синев А.В., Фурман Ф.А. и др. [3-11]. Применительно к автомобилям активное подрессоривание рассматривали в своих работах Кольцов В.И., Фурунжиев Р.И., Останин А.Н., Шарапов В.Д., зарубежные ученые: Саттон X.Б., Томпсон А.Г. и др. [12-16]. Исследователями отмечается, что наиболее эффективны с точки зрения плавности хода активные подвески.
Активные подвески могут быть двух принципиально различных типов. В подвесках первого типа отсутствуют пассивные упруго-демпфирующие элементы. При этом корпус автомобиля связывается с колесами посредством неупругих звеньев, имеющих возможность изменения силы в подвеске машины по сигналу системы управления [4, 12]. Такого рода системы предпочтительно создавать с управлением по возмущению [16].
В активной подвеске второго типа присутствуют пассивные упруго-демпфирующие элементы, вызывающие переменное во времени усилие в подвеске. Установленные же в подвеске активные элементы (например, гидроцилиндры) создают усилия для гашения колебаний корпуса. Этот тип активных подвесок вызывает в настоящее время наибольший практический интерес по следующим причинам:
1) меньшие энергозатраты на привод активных элементов, в связи с возможностью ограничения скорости отработки сигнала управления без потери работоспособности;
2) меньшее требуемое быстродействие системы управления;
3) большая надежность, во-первых, из-за более простой системы управления, во-вторых, вследствие того, что работоспособность автомобиля не теряется при выходе из строя системы управления.
Также системы с динамическим управлением могут быть разделены на системы с непрерывным управлением и системы с дискретным (релейным) управлением. В первом случае управляющее воздействие рассчитывается как приращение к действующим в подвеске силам. Примером такой системы может служить система управления, представленная в работе [17]. В качестве релейного управления может выступать система управления подвеской с двухуровневым демпфированием [18], когда в зависимости от условий движения устанавливается либо высокий, либо низкий уровень демпфирования.
На работоспособность и качество системы управления подвеской (СУП) оказывает влияние большое число факторов: быстродействие системы, т.е. время от момента замера параметров до момента реализации управляющих воздействий; точность измерения и передачи параметров, используемых для расчета управляющих воздействий; точность отработки управляющих воздействий исполнительными органами. Ухудшение параметров СУП по каждому из перечисленных показателей может привести не только к снижению эффективности ее работы, но и к полной потере работоспособности системы.
В самом деле, безинерционных систем не бывает. Время задержки ∆tпрохождения сигнала обусловлено временем, необходимым на измерение значений необходимых параметров, на передачу этих данных в бортовой компьютер, на расчет управляющих воздействий и отработку этих воздействий исполнительными устройствами. Увеличение времени задержки негативно сказывается на качестве системы управления.
То же самое можно сказать и в отношении точности измерений. Очевидно, что точность работы системы управления не может быть выше точности измерений. Источниками ошибок в измерительных трактах СУП являются: погрешности датчиков; погрешности, возникающие при переводе сигналов из аналоговой формы в цифровую; погрешности вычислений; погрешности в обратных связях исполнительных устройств СУП.
Однако в настоящее время отсутствуют научно обоснованные критерии, характеризующие качество работы системы управления подвеской. В связи с этим нет возможности, во-первых, проводить анализ эффективности разработанных законов управления в реальных условиях эксплуатации, и, во-вторых, невозможно проводить сравнение различных законов управления между собой. Целью данной работы является разработка критериев оценки эффективности законов управления подвеской при различных значениях параметров запаздывания и ошибки измерений входных сигналов, а также исследование методами имитационного моделирования эффективности работы непрерывного и релейного законов управления системой подрессоривания МКМ, предложенных в работах [17] и [18].
1. Критерии эффективности работы системы управления
подвеской многоосных колесных машин
Сформулируем требования, предъявленные к критериям эффективности работы СУП. Значения критериев должны быть выражены в относительных единицах, что позволит сравнивать эффективность работы СУП в различных условиях работы. Кроме того, критерии эффективности должны быть построены на базе интегрального показателя вибронагруженности ( ГОСТ 12.1.012-2004), а именно дисперсии вертикальных ускорений на месте водителя.
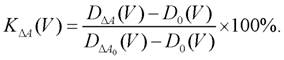
Тогда критерий эффективности, характеризующий работу СУП с учетом только инерционности звеньев системы в зависимости от скорости движения машины V, может быть записан в виде
 (1)
(1)
где ![]() - дисперсия вертикальных ускорений на месте водителя для случая управляемой подвески и суммарной временной задержки Δt;
- дисперсия вертикальных ускорений на месте водителя для случая управляемой подвески и суммарной временной задержки Δt; ![]() - дисперсия вертикальных ускорений на месте водителя для случая неуправляемой подвески;
- дисперсия вертикальных ускорений на месте водителя для случая неуправляемой подвески; ![]() - дисперсия вертикальных ускорений на месте водителя для случая управляемой подвески и суммарной временной задержки Δt=0 (идеальная система).
- дисперсия вертикальных ускорений на месте водителя для случая управляемой подвески и суммарной временной задержки Δt=0 (идеальная система).
Критерий (1) характеризует степень снижения дисперсии вертикальных ускорений на месте водителя для управляемой подвески с ненулевой временной задержкой по сравнению с неуправляемой, отнесенную к той же величине, но для идеальной системы с нулевой задержкой (при отсутствии ошибок измерений). Нетрудно видеть, что для идеальной системы![]() .
.
Критерий эффективности, характеризующий работу СУП с учетом только суммарной относительной погрешности измерений в зависимости от скорости движения машины V, может быть записан формулой
 (2)
(2)
Здесь ![]() - дисперсия вертикальных ускорений на месте водителя для случая управляемой подвески и суммарной погрешности ΔA;
- дисперсия вертикальных ускорений на месте водителя для случая управляемой подвески и суммарной погрешности ΔA; ![]() - дисперсия вертикальных ускорений на месте водителя для случая управляемой подвески и суммарной погрешности ΔA=0 (идеальная система).
- дисперсия вертикальных ускорений на месте водителя для случая управляемой подвески и суммарной погрешности ΔA=0 (идеальная система).
Критерий (2) характеризует степень снижения дисперсии вертикальных ускорений на месте водителя для управляемой подвески с ненулевой суммарной относительной погрешностью измерений по сравнению с неуправляемой, отнесенную к той же величине, но для идеальной системы с нулевой ошибкой (при отсутствии запаздывания). Нетрудно видеть, что для идеальной системы ![]()
Для проведения сравнительного анализа эффективности различных СУП введем критерий K, характеризующий работу идеальной системы управления подвеской (при отсутствии запаздывания и инерционности звеньев системы управления) по сравнению с неуправляемой подвеской.
 (3)
(3)
где ![]() - дисперсия вертикальных ускорений на месте водителя для случая управляемой подвески.
- дисперсия вертикальных ускорений на месте водителя для случая управляемой подвески.
Критерий (3) характеризует степень снижения дисперсии вертикальных ускорений на месте водителя для случая управляемой подвески по сравнению с неуправляемой системой подрессоривания.
2. Влияние инерционности звеньев системы управления подвеской на эффективность ее работы
Для исследования зависимости эффективности систем релейного и непрерывного управления подвеской в работах [17] и [18] было проведено моделирование прямолинейного движения МКМ по грунтовой дороге со скоростями движения 10 … 70 км/час. Для описания движения колесного шасси по дорожной поверхности была использована математическая модель, разработанная на кафедре «Колесные машины» МГТУ им. Н.Э. Баумана [2]. Особенностью математической модели движения МКМ по неровностям является то, что скорость машины задается не принудительно, а формируется силами взаимодействия вращающихся колесных движителей с опорным основанием. Это позволяет получить высокую точность при моделировании реальных процессов движения МКМ. Программа разработана в среде Simulinkпрограммного комплекса MATLAB. При этом в систему вводилось звено, обеспечивающее постоянную задержку управляющего сигнала, что имитировало суммарную задержку во всех трактах системы. На рис. 1 приведены зависимости критерия эффективности![]() , определенного формулой (1), для системы непрерывного управления для различных скоростей движения и интервалов задержки сигнала в диапазоне 0 … 0,3 сек.
, определенного формулой (1), для системы непрерывного управления для различных скоростей движения и интервалов задержки сигнала в диапазоне 0 … 0,3 сек.

Рис. 1. Зависимости критерия эффективности ![]() для системы непрерывного управления для различных скоростей движения Vи интервалов задержки сигнала Δt
для системы непрерывного управления для различных скоростей движения Vи интервалов задержки сигнала Δt
Анализ зависимостей, приведенных на рис. 1, показывает, что система непрерывного управления подвеской чувствительна к инерционности звеньев. Диапазон запаздывания 0,1 … 0,3 сек является характерным для большинства систем управления. Система непрерывного управления при таком запаздывании существенно теряет свою эффективность. Отсюда требования по быстродействию для непрерывного управления являются высокими. Можно утверждать, что система сохранит свою эффективность, если время запаздывания не будет превышать 0,1 сек.
Аналогичные исследования были проведены для системы релейного управления в диапазоне времени задержки 0 … 0,5 сек. Результаты моделирования показали, что в указанном диапазоне релейная система не потеряла в эффективности, сохранив значение показателя![]() , на уровне 100 %.
, на уровне 100 %.
3. Влияние погрешности измерений на эффективность
работы системы управления подвеской
Для исследования зависимости эффективности систем релейного и непрерывного управления подвеской в работах [17] и [18] было проведено моделирование прямолинейного движения МКМ по грунтовой дороге со скоростями движения 10 … 70 км/час. При этом ошибка измерений моделировалась в виде белого шума, подаваемого в тракт передачи управляющего сигнала. Суммарная относительная погрешность измерений определяется по формулам
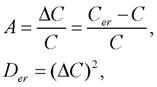
где Cer – измеренное с ошибкой значение сигнала; C – истинное значение сигнала; Der – суммарная дисперсия ошибки.
Значение Cerвычисляется с помощью выражения
![]()
Здесь ![]() - белый шум с нулевым математическим ожиданием и дисперсией Der.
- белый шум с нулевым математическим ожиданием и дисперсией Der.
На рис. 2 приведены зависимости критерия эффективности![]() , определяемого формулой (2), для системы непрерывного управления для различных скоростей движения и значений относительной погрешности измерений 0…10 %.
, определяемого формулой (2), для системы непрерывного управления для различных скоростей движения и значений относительной погрешности измерений 0…10 %.
Рис. 2. Зависимости критерия эффективности ![]() для системы непрерывного управления для различных скоростей движения Vи значений относительной погрешности измерений ΔA
для системы непрерывного управления для различных скоростей движения Vи значений относительной погрешности измерений ΔA
Анализ зависимостей, приведенных на рис. 2, показывает, что погрешности измерений оказывают существенное влияние на эффективность работы системы непрерывного управления подвеской. Приемлемым значением суммарной относительной погрешности измерений по всем каналам может быть признан диапазон 2,5…5 %.
Аналогичные исследования были проведены для системы релейного управления в том же диапазоне значений суммарной относительной ошибки. Результаты моделирования показали, что в указанном диапазоне релейная система не потеряла в эффективности, сохранив значение показателя ![]() на уровне 100 %.
на уровне 100 %.
4. Сравнение эффективности работы систем непрерывного и релейного управления подвеской по результатам моделирования
Анализ результатов компьютерного моделирования движения многоосной колесной машины по грунтовым дорогам позволяет провести сравнение эффективности двух разработанных законов управления подвеской: закона непрерывного управления [17] активной подвеской и закона релейного управления двухуровневым демпфированием [18]. На рис. 3 показана зависимость показателя эффективности K(V), определенного формулой (3), от скорости движения.
Рис. 3. Зависимости критерия эффективности K(V) для систем непрерывного и релейного управления для различных скоростей движения Vпо грунтовой дороге
Из графиков на рис. 3 видно, что для релейной системы управления степень гашения колебаний практически постоянна и составляет примерно 50 %. Система непрерывного управления демонстрирует максимальную эффективность в диапазоне скоростей 10… 30 км/ч, потом эффективность снижается и стабилизируется на уровне 20 %. Такой характер изменения показателя эффективности непрерывной системы управления можно объяснить физическими ограничениями, которые накладываются на управляющие воздействия [17].
Результаты комплексного сравнения эффективности двух систем управления (релейной и непрерывной) приведены в таблице 1. Как видно из рис. 3, эффективность работы релейной системы управления при движении со скоростями 10…70 км/час, когда основным критерием эффективности является снижение вибронагруженности экипажа и перевозимого груза, выше, чем у непрерывной системы управления. Однако при необходимости обеспечения динамической стабилизации корпуса МКМ при силовых воздействиях система непрерывного управления активной подвеской является гораздо более эффективной, чем релейная система управления двухуровневым демпфированием, что показано в работе [19].
Затраты энергии на управление в случае активной подвески на порядок и больше могут превышать затраты в случае управления двухуровневым демпфированием [20], поскольку в последнем случае энергия затрачивается только на обеспечение срабатывания исполнительных устройств подвески (например, регулируемые дроссельные устройства), в то время как активная подвеска требует подведения энергии на создание восстанавливающей силы в подвеске (например, нагнетание рабочей жидкости в полости пневмогидравлической рессоры). При одинаково низкой сложности программной реализации активная подвеска является гораздо более сложной по конструкции, что существенно увеличивает ее стоимость и снижает надежность по сравнению с релейным управлением. Результаты комплексного сравнения эффективности работы непрерывной системы управления активной подвеской и релейной системы управления двухуровневым демпфированием приведены в таблице 1.
Таблица 1
Результаты сравнения эффективности работы алгоритмов управления подвеской
№ | Критерий сравнения | Непрерывная система управления активной подвеской | Релейная система управления двухуровневым демпфированием |
1 | Снижение вибронагруженности | + | + |
2 | Динамическая стабилизация корпуса МКМ при единичных воздействиях | + | – |
3 | Энергозатраты на управление | – | + |
4 | Простота программной | + | + |
5 | Простота аппаратной | – | + |
6 | Чувствительность к инерционности звеньев СУП | – | + |
7 | Чувствительность к наличию ошибок в измерительных и передающих трактах СУП | – | + |
Исходя из вышесказанного, можно указать оптимальные области применимости обеих систем управления.
Система дискретного управления двухуровневым демпфированием должна применяться в подвесках МКМ с исполнительными органами релейного типа (золотниковые устройства и клапаны в пневмогидравлических упругих элементах и в гидравлических амортизаторах, снабженных системой управления открытием и закрытием клапанов). Система непрерывного управления должна применяться в подвесках, где главной задачей является динамическая стабилизация корпуса МКМ.
Заключение
В работе получены следующие основные результаты.
Впервые предложены критерии оценки эффективности работы систем управления подвеской при наличии в этих системах запаздывания и ошибок измерения входных параметров.
Впервые проведен комплексный анализ эффективности работы систем управления подвеской на основе активного непрерывного и полуактивного релейного законов, когда целью управления является снижение вибронагруженности водителя.
Показано, что непрерывная система управления активной подвеской должна применяться в том случае, когда главной задачей является динамическая стабилизация корпуса МКМ при силовых воздействиях на корпус МКМ. Система дискретного управления должна работать в транспортных режимах движения (при кинематическом воздействии на корпус машины), обеспечивая высокую плавность хода при минимальных энергетических затратах.
Список литературы
- Дмитриченко С.С., Завьялов Ю.А. Методические основы исследования микропрофилей дорог и полей для решения задач динамики тракторов // Межвузовский сборник научных трудов. - М. 1983. - С. 49-60.
- Жеглов Л.Ф. Автоматические системы подрессоривания. Учебное пособие. – М.: МГТУ им. Н.Э. Баумана, 2001. – 48 с.
- Балагула В.Я., Гайцгори М.М. Активные системы виброзащиты для строительных и дорожных машин // Исследование землеройно-транспортных машин / Труды ВНИИСтройдормаша. - 1976. - Вып.72. - С. 44-51.
- Балагула В.Я., Гайцгори М.М. Выбор структуры управления и параметров активной подвески землеройно-транспортных машин // Труды ВНИИСтройдормаша. - 1977. - Вып. 75. - С. 39-48.
- Выговский В.В. О синтезе управлений в активной виброзащитной системе твердого тела // Управляемые механические системы - Иркутск, 1979. - С. 41-51.
- Елисеев С.В. Теория активных виброзащитных систем и ее приложения: Автореф. дисс. ... докт. техн. наук. - Иркутск, 1973. - 34 с.
- Теория активных виброзащитных систем - Иркутск: ИПИ, Сб. трудов N 438.- 1974. – 241 с.
- Динамика управляемых механических систем / Под. ред. С.В.Елисеева.- Иркутск, ИПИ, 1982. – 186 с.
- Коловский M.3. Автоматическое управление виброващитными системами. - М.: Наука, 1976. – 319 с.
- Коловский M.3. Об оптимизации активных виброващитных систем // Машиноведение. - 1977. - N 6. - С. 42-46.
- Фролов К. В., Фурман Ф.А. Прикладная теория виброзащитных систем. - М.: Машиностроение, 1980. – 276 с.
- Шарапов В.Д. Активные подвески транспортных средств. - Рига: РВВПКУ, 1980. – 261 с.
- Фурунжиев P.И., Останин А. Н. Управление колебаниями многоопорных машин. - М.: Машиностроение, 1984. – 206 с.
- Кольцов В.И. Принципиальные возможности подвески назем ных видов транспорта: Дисс. . . . канд. техн. наук. Специальность 05.05.03 - Автомобили и тракторы - M., 1967, - 231 с.
- Sutton Н.В. Synthesis of active suspension systems // Ph. D. thesis, University of Salford. - 1978.
- Tompson A. Design of active suspensions // Proc. Inst. Mech. Eng. - 1970-71. V. 185. - P. 553-563.
- Жилейкин М.М. Синтез адаптивной динамической непрерывной системы гашения колебаний корпуса многоосных колесных машин [Электронный ресурс] // Электрон. журн. «Наука и образование: электронное научно-техническое издание», 2011. Выпуск 10, № 77-30569/347169 – Режим доступа: http://technomag.edu.ru/doc/347169.html, свободный.
- Жилейкин М.М. Разработка адаптивного алгоритма релейного управления двухуровневым демпфированием подвески многоосных колесных машин [Электронный ресурс] // Электрон. журн. «Наука и образование: электронное научно-техническое издание», 2011 Выпуск 12, № 77-30569/347444 – Режим доступа: http://technomag.edu.ru/doc/347444.html, свободный.
- Жилейкин М.М. Синтез адаптивной динамической непрерывной системы стабилизации корпуса [Электронный ресурс] // Электрон. журн. «Наука и образование: электронное научно-техническое издание», 2011. Выпуск 11, № 77-30569/347435 – Режим доступа: http://technomag.edu.ru/doc/347435.html, свободный.
- Сухоруков А.В. Управление демпфирующими элементами в системе подрессоривания быстроходной гусеничной машины: Дисс. ... канд. техн. наук. Специальность 05.05.03 - Автомобили и тракторы.- М., 2003.- 204 с.
Публикации с ключевыми словами: управление подвеской многоосных колесных машин, непрерывное управление, релейное управление, критерии эффективности системы управления
Публикации со словами: управление подвеской многоосных колесных машин, непрерывное управление, релейное управление, критерии эффективности системы управления
Смотри также:
- 77-30569/347098 Разработка статического алгоритма управления подвеской многоосных колесных машин: автоматизированное преодоление траншеи
- 77-30569/347058 Разработка статического алгоритма управления подвеской многоосных колесных машин: автоматизированное преодоление эскарпа
- 77-30569/293578 Методика подбора характеристик управляемой подвески с двумя уровнями демпфирования многоосных колесных машин
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||