научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 01, январь 2012
УДК 629.33
МГТУ им. Н.Э. Баумана
Введение
Неоспорим тот факт, что в автомобилестроении большие перспективы развития имеет направление, связанное с применением многоосных большегрузных автопоездов и сочленённых самоходных платформ. Широкое распространение и дальнейшее совершенствование указанных транспортных средств обусловлено рядом объективных факторов: потребностью в перевозках тяжёлых крупногабаритных грузов с исключением процессов раздельной перевозки и последующей сборки составных частей; необходимостью повышения грузоподъёмности при одновременном обеспечении высокой проходимости при движении по грунтовым дорогам и вне дорог; необходимостью обеспечения малых давлений на опорную поверхность в целях уменьшения разрушающего воздействия на почву и др.
Большие перспективы имеет использование автопоездов в промышленных и сельскохозяйственных районах со слаборазвитой сетью дорог, что особенно актуально для нашей страны. Однако известно, что прицепная нагрузка на крюке существенно ухудшает проходимость. Тягово-сцепные свойства автопоездов значительно ниже, чем одиночных автомобилей.
1. Способы повышения тягово-динамических свойств автопоездов
Для повышения тягово-динамических свойств предлагаются различные конструктивные решения. Стремление к повышению проходимости автопоездов привело к созданию так называемых активных автопоездов. Проходимость активных автопоездов значительно выше, чем одиночных автомобилей, что объясняется большей суммарной тягой (из-за большего числа ведущих колес) в тяжелых дорожных условиях. Активные автопоезда с успехом эксплуатируются в тяжелых дорожных условиях, их использование позволяет транспортировать грузы, когда это не возможно за счет обычных полноприводных автомобилей.
Ниже приводится изложение одного из возможных способов повышения проходимости прицепного автопоезда за счет раздельного перемещения звеньев. Этот способ применим не только к автопоездам, в составе которых используются полноприводные тягачи, но и к автопоездам с неполноприводными тягачами. По данным [1] в последнем случае эффект повышения проходимости даже больше, чем в первом.
Сущность способа заключается в следующем (рис. 1).
При потере автопоездом проходимости, когда сила сопротивления качению автопоезда ![]() , равная сумме сил сопротивления качению тягача
, равная сумме сил сопротивления качению тягача ![]() и прицепа
и прицепа ![]() , оказывается больше силы тяги по сцеплению с грунтом ведущих колес тягача
, оказывается больше силы тяги по сцеплению с грунтом ведущих колес тягача ![]() , затормаживается заднее звено автопоезда - прицеп и от него отталкивается переднее звено - тягач, осуществляемое двусторонним силовым гидроцилиндром, расположенным в раздвижном телескопическом дышле прицепа. При этом к силе тяги ведущих колес тягача
, затормаживается заднее звено автопоезда - прицеп и от него отталкивается переднее звено - тягач, осуществляемое двусторонним силовым гидроцилиндром, расположенным в раздвижном телескопическом дышле прицепа. При этом к силе тяги ведущих колес тягача ![]() добавляется сила отталкивания
добавляется сила отталкивания ![]() . Тягач, двигаясь раздельно от прицепа, может преодолевать сопротивление качению
. Тягач, двигаясь раздельно от прицепа, может преодолевать сопротивление качению ![]() . По окончании перемещения тягач тормозится, производится растормаживание прицепа, который подтягивается тем же силовым гидроцилиндром к тягачу силой
. По окончании перемещения тягач тормозится, производится растормаживание прицепа, который подтягивается тем же силовым гидроцилиндром к тягачу силой ![]() . При этом прицеп, двигаясь раздельно, может преодолевать сопротивление качению
. При этом прицеп, двигаясь раздельно, может преодолевать сопротивление качению ![]() . Для продолжения движения автопоезда циклы раздельного перемещения тягача и прицепа повторяются [1].
. Для продолжения движения автопоезда циклы раздельного перемещения тягача и прицепа повторяются [1].
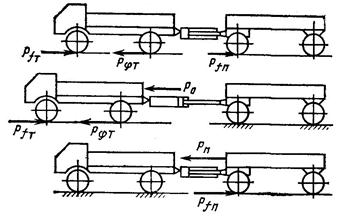
Рис. 1. Принципиальная схема движения автопоезда при раздельном перемещении его звеньев
Способ раздельного перемещения звеньев обеспечивает также возможность преодоления более крутых подъемов. Движение автопоезда при раздельном перемещении звеньев может осуществляться или с подводом мощности к ведущим осям тягача или только за счет сил отталкивания ![]() и подтягивания
и подтягивания ![]() . В последнем случае преодолеваемое тягачом сопротивление качению снижается, но увеличение массы прицепа может частично компенсировать это снижение.
. В последнем случае преодолеваемое тягачом сопротивление качению снижается, но увеличение массы прицепа может частично компенсировать это снижение.
Рассмотренный способ повышения проходимости, основанный на раздельном перемещении звеньев, может быть применен не только на автопоездах, но и на транспортных средствах других типов. Экономически целесообразно его использование на транспортных средствах с гидросистемами на самосвальных автопоездах, на тракторных поездах, на сочлененных колесных автомобилях.
При соединении двух элементарных кинематических звеньев (одно из которых или оба звена активные) в точке сцепки возникают силы взаимодействия, являющиеся реакциями связи, величина и направление действия которых зависят от типа связи (тяговая или опорно-тяговая), вида сопряженных звеньев (активное или пассивное звено), порядка их сопряжения (переднее звено активное, оба звена активных и т.д.) и режима движения.
Интенсивность продольных горизонтальных колебаний зависит от характера внешних сил, воздействующих на ТС при его движении, качества дорожного покрытия, некоторых конструктивных и эксплуатационных параметров (жесткости упругой связи, зазоров и сопротивления демпфера в сцепке, соотношения масс звеньев) и квалификации водителя [2, 3, 4].
Характер динамического взаимодействия звеньев автопоезда существенно зависит от характеристики упругого элемента и упругой характеристики сцепного устройства. На упругую характеристику сцепного устройства влияет наряду с характеристикой упругого элемента характер монтажа (наличие предварительного поджатия и его величина) и наличие зазоров [2, 4].
Расчеты показывают, что тягач с упругим устройством в сцепке теоретически способен сдвинуть прицепное звено в два раза большее по массе по сравнению с тягачем, имеющим жесткое сцепное устройство. Выявлено также, что упругая связь по сравнению с жесткой сцепкой может обеспечить трогание автопоезда с места при меньшем коэффициенте сцепления колес с опорной поверхностью [2].
2. Метод прогнозирования опорной проходимости колесных транспортных комплексов
Таким образом, в ходе экспериментальных исследований доказано, что в зависимости от характера связи между тягачом и прицепом автопоезд может иметь различные тягово-динамические качества. В этой связи необходимо на стадии проектирования решить задачу по прогнозированию характеристик прямолинейного движения автопоезда по бездорожью при: буксировании прицепа движущимся тягачом с жесткой связью, буксировании прицепа движущимся тягачом с гибкой связью (односторонней на тросе), буксировании прицепа неподвижным тягачом с использованием лебёдки и анкерно-упорного устройства.
Для этих целей были разработана математическая модель прямолинейного движения колесного транспортного комплекса по деформируемому грунту, расчетная схема которой представлена на рис. 2. Особенности математической модели динамики автопоезда, а также метода моделирования свойств опорного основания, подробно представлены в [5, 6].
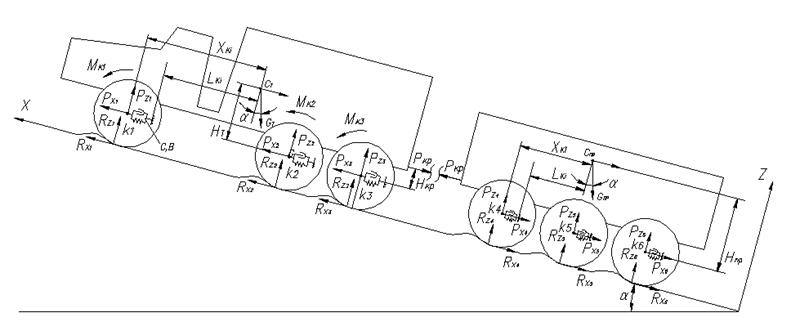
Рис. 2. Расчетная схема движения автопоезда
Построение математической модели прямолинейного движения колесного комплекса рассмотрено на примере трехосного тягача с возможностью реализации индивидуального, дифференциального и блокированного привода колёс и трехоcного прицепа в ведомом режиме. Расчётная схема автопоезда, представленная на рис. 2, принята с учётом характера решаемой задачи и описывается следующими уравнениями движения для тягача (1) и прицепа (2):
тягач
| (1) |

прицеп
| (2) |


Здесь i= 1, …3; ![]() и
и ![]() - масса тягача и прицепа, соответственно;
- масса тягача и прицепа, соответственно; ![]() - масса колеса;
- масса колеса; ![]() - момент инерции колеса; i - номер колеса;
- момент инерции колеса; i - номер колеса; ![]() и
и ![]() - продольное ускорение центра масс тягача и прицепа, соответственно;
- продольное ускорение центра масс тягача и прицепа, соответственно; ![]() - угловое ускорение i-го колеса;
- угловое ускорение i-го колеса; ![]() - продольное ускорение центра масс i-го колеса; g - ускорение свободного падения;
- продольное ускорение центра масс i-го колеса; g - ускорение свободного падения; ![]() - угол наклона опорной поверхности;
- угол наклона опорной поверхности; ![]() - коэффициент буксования;
- коэффициент буксования; ![]() - тягово-энергетическая характеристика;
- тягово-энергетическая характеристика; ![]() - тягово-сцепная характеристика;
- тягово-сцепная характеристика; ![]() - вертикальная реакция в пятне контакта колес тягача с опорной поверхностью;
- вертикальная реакция в пятне контакта колес тягача с опорной поверхностью; ![]() - радиус колеса в свободном режиме качения;
- радиус колеса в свободном режиме качения; ![]() - сила на крюке;
- сила на крюке; ![]() - сила, действующая на корпус тягача со стороны колеса по оси X.
- сила, действующая на корпус тягача со стороны колеса по оси X.
3. Результаты вычислительных экспериментов
Ниже представлен анализ результатов математического моделирования, полученных в ходе теоретических исследований автопоезда на основе разработанного метода прогнозирования опорной проходимости автопоездов при прямолинейном движении по бездорожью
На этапе моделирования были исследованы следующие случаи движения: в качестве тестового режима для расчетов выбран вариант с тремя различными жесткостями сцепного устройства для анализа работоспособности математической модели.
Исходные данные для проведения теоретических исследований следующие: масса автомобиля mс = 13800 кг; масса прицепа mс_пр = 8400 кг; радиус колеса в свободном режиме rk0 = 0.5 м; максимальное значение коэффициента сцепления колеса с опорной поверхностью в продольном направлении φmax = 0.35; схема трансмиссии автомобиля-тягача блокированная.
Процесс моделирования начинался со скорости Vx0 =0.1 м/с и для автомобиля-тягача, и для прицепа. Движение в сложных дорожных условиях не предполагает высоких скоростей, поэтому максимальная скорость по условию развиваемого момента двигателем задавалась равной Vmax = 2 м/с.
На первоначальном этапе проведения расчетов была поставлена задача моделирования движения автопоезда с характеристиками сцепного устройства в «граничных» условиях, т.е. при отсутствии связи (Pкр = 0) и при жесткой связи, т.е. при больших значениях коэффициента жесткости сцепного устройства в продольном направлении ![]() и коэффициента сопротивления демпфера сцепного устройства в продольном направлении
и коэффициента сопротивления демпфера сцепного устройства в продольном направлении ![]() .
.
При отсутствии силы, связывающей тягач и прицеп, были получены результаты, представленные на рис 3-5.
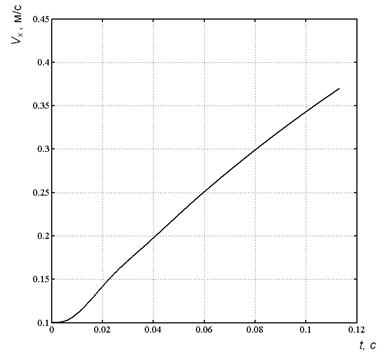
Рис. 3. Скорость центра масс автомобиля-тягача
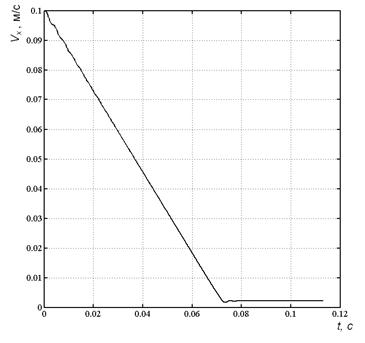
Рис. 4. Скорость центра масс прицепа
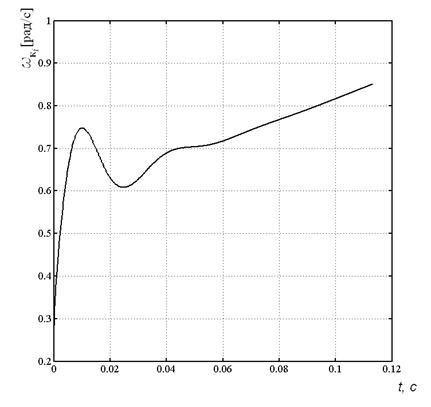
Рис. 5. Угловая скорость вращения колес автомобиля-тягача
Анализ представленных результатов позволяет сделать вывод о том, что автомобиль-тягач и прицеп двигались отдельно друг от друга. Автомобиль-тягач плавно разгонялся до заданной скорости (рис. 3), а прицеп остановился через 0,07 с после начала движения (рис. 4), небольшая скорость обусловлена заданием ограничений при реализации математической модели с целью исключения нулевых значений.
Рис. 5 иллюстрирует равенство угловых скоростей колес автомобиля тягача, что характерно для блокированного привода.
На следующем этапе проведения расчетов была исследована динамика автопоезда при заранее заданном очень большом значении коэффициента жесткости сцепного устройства С=107 Н/м и отсутствии демпфирования.
При выбранном значении коэффициента жесткости сцепного устройства тягач смог транспортировать за собой прицеп (рис. 6, 7), при этом пройденный колесами путь с учетом начальных координат представлен на рис. 9. Характер изменения силы тяги на крюке, представленный на рис. 8, свидетельствует о колебательном процессе, а также о резком нарастании силы в сцепном устройстве, что в итоге может нарушить работоспособность конструкции.
Таким образом, на основе разработанной математической модели возможно оценивать также динамические нагрузки на сцепные устройства с целью оптимизации конструктивных решений буксировочных устройств по критериям прочности и надежности. Результаты движения автопоезда при различном характере связи между звеньями подтверждают необходимость оптимизации параметров сцепного устройства.
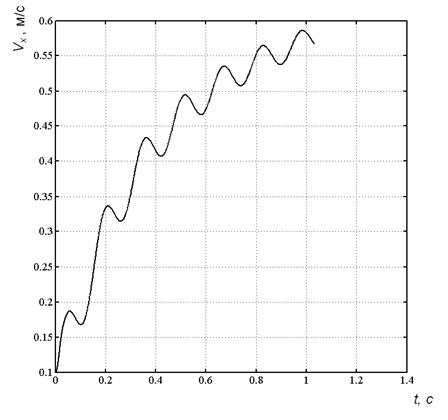
Рис. 6. Скорость центра масс автомобиля-тягача

Рис. 7. Скорость центра масс прицепа
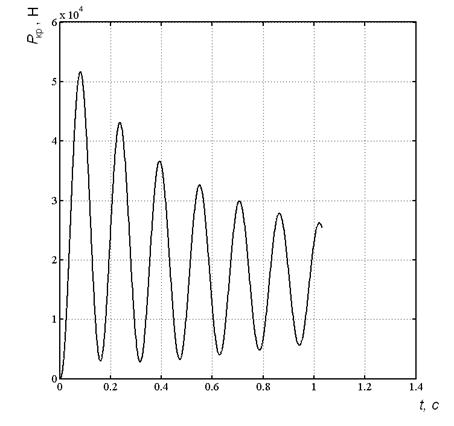
Рис. 8. Характер изменения силы тяги на крюке

Рис. 9. Перемещение колес автомобиля-тягача
Проведенная оптимизация по методу половинного деления позволила сделать вывод, что для заданных условий необходимо принять коэффициент жесткости сцепного устройства в продольном направлении ![]() =106 Н/м и соответствующий ему коэффициент сопротивления демпфера сцепного устройства в продольном направлении
=106 Н/м и соответствующий ему коэффициент сопротивления демпфера сцепного устройства в продольном направлении ![]() = 20000 Н×с/м. Результаты динамики автопоезда представлены на рис 10-12. Характер изменения показателей движения свидетельствует о необходимости демпфирования в сцепном устройстве. К 3-ой секунде после начала движение стало установившимся.
= 20000 Н×с/м. Результаты динамики автопоезда представлены на рис 10-12. Характер изменения показателей движения свидетельствует о необходимости демпфирования в сцепном устройстве. К 3-ой секунде после начала движение стало установившимся.

Рис. 10. Скорость центра масс автомобиля-тягача
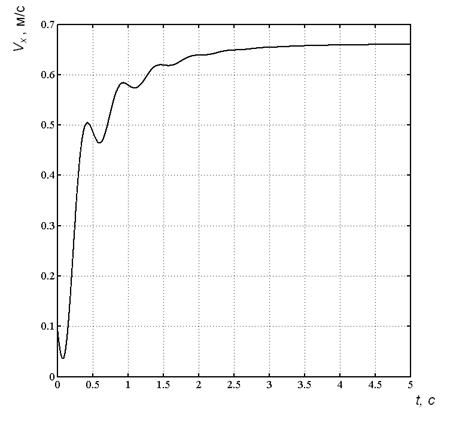
Рис. 11. Скорость центра масс прицепа
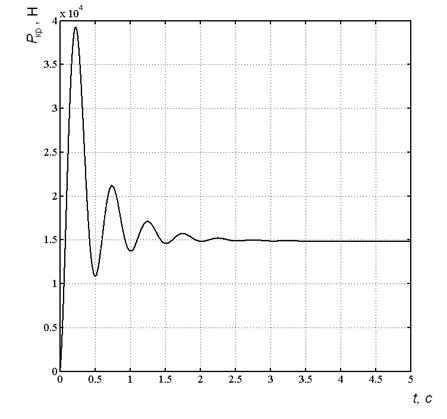
Рис. 12. Характер изменения силы тяги на крюке
Отдельной интересной задачей является исследование раздельного перемещения звеньев. Исследуем динамику прицепа при различном характере приложения крюковой нагрузки. При заданном максимальном значении возможной тяги Pкр_max , изменялось время нарастания её действия. В данном случае действие Pкр_max имитирует работу вспомогательных устройств, например лебедки.
Исходные данные для проведения теоретических исследований следующие: масса звена mс_пр = 8400 кг; радиус колеса в свободном режиме rk0 = 0.5 м; максимальное значение коэффициента сцепления колеса с опорной поверхностью в продольном направлении φmax = 0.35.
Процесс моделирования начинался со скорости Vx0 =0.1 м/с. При достаточно большой скорости нарастания (рис. 13) Pкр_max до значения в 30000 Н были получены результаты, представленные на рис. 14 и 15. Их анализ показывает, что смоделирован случай резкого нарастания силы сопротивления грунта и звено перемещается юзом.

Рис. 13. Характер изменения силы тяги на крюке
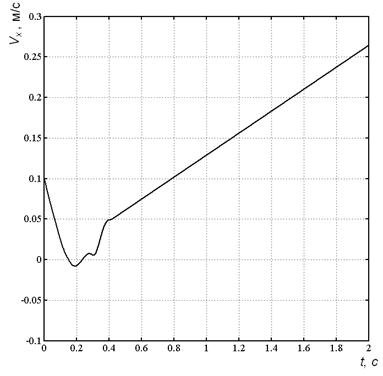
Рис. 14. Скорость центра масс
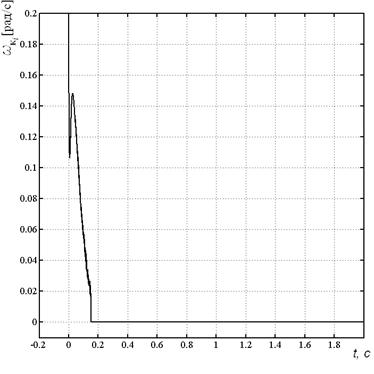
Рис. 15. Угловая скорость вращения колес
Безусловно, такой характер приложения нагрузки на крюке не может положительно сказаться на обеспечении высокого уровня проходимости, поэтому в следующем расчетном случае нагрузка на крюке увеличивалась медленнее (рис. 16.), чем в первом случае. Анализ графиков рис. 17 и 18 показывает, что в таком случае скорость центра масс звена находится в соответствии со скоростью вращения колес, т.е. плавное приложение силы тяги на крюке позволяет двигаться без юза. В то время, пока силы на крюке было не достаточно для движения, прицеп останавливался, и в период с 0,2 по 0,6 секунду практически оставался в состоянии покоя.

Рис. 16. Характер изменения силы тяги на крюке

Рис. 17. Скорость центра масс

Рис. 18. Угловая скорость вращения колес
Заключение
Проведённые вычислительные эксперименты прямолинейного движения автопоезда полной массой 22 т как при совместном перемещении звеньев, так и при раздельном, позволили сделать выводы о работоспособности модели и пригодности её для прогнозирования опорной проходимости двухзвенного автопоезда, в том числе и при различном характере и параметрах связи между звеньями, а также для подбора оптимальных параметров для сцепных устройств.
Полученные результаты исследований совместной динамики звеньев автопоезда при различных параметрах сцепного устройства подтвердили противоречивость предъявляемых к ним требований:
- на этапе разгона сила на крюке не должна быть достаточно большой, чтобы тягач имел возможность запасти кинетическую энергию и использовать её для «страгивания» прицепа с места, а также с целью исключения перемещения прицепа юзом;
- по мере увеличения скорости автопоезда сила в сцепном устройстве должна возрастать, чтобы исключить колебания, негативным образом сказывающиеся на динамике системы в целом;
- характер приложения нагрузки на крюке должен быть плавным, резкое приложение силы отрицательным образом сказывается на опорной проходимости автопоезда.
Очевидно, что для обеспечения наилучших тягово-динамических качеств автопоездов необходимо осуществлять управление характеристиками сцепных устройств непрерывно в процессе движения. Например, в качестве варианта «на перспективу» возможно предложить использование демпфирующих устройств на основе магнитореологических жидкостей. Такие устройства позволят непрерывно изменять характеристики сцепного устройства в процессе движения в зависимости от внешних условий.
Таким образом, представленные результаты исследований позволили сделать вывод об эффективности разработанного метода прогнозирования опорной проходимости колесных транспортных комплексов при прямолинейном движении по бездорожью, который может быть использован разработчиками на стадии проектирования колесной техники для решения широкого круга задач, в том числе, для оценки средней скорости движения на заданном маршруте, принципиальной возможности перевозки конкретного груза в заданных дорожных условиях, для анализа преимуществ и недостатков различных схем трансмиссии, для оценки эффективности различных законов управления индивидуальным приводом колесной машины, для проектирования и расчета буксирных устройств и т.д.
СПИСОК ЛИТЕРАТУРЫ
1. Платонов В.Ф. Полноприводные автомобили. – М.: Машиностроение, 1981. – 279 с.
2. Гладов Г.И., Петренко А.М. Специальные транспортные средства: Теория: Учебник для вузов / Под ред. Г.И. Гладова. – М.: ИКЦ «Академкнига», 2006. – 215 с.
3. Гладов Г.И., Петренко А.М. Специальные транспортные средства: Проектирование и конструкции: Учебник для вузов / Под ред. Г.И. Гладова. – М.: ИКЦ «Академкнига», 2004. – 320 с.
4. Закин Я.Х. Прикладная теория движения автопоезда. – Изд-во «Транспорт», 1967. – 253 с.
5. Котиев Г.О., Горелов В.А. Моделирование прямолинейного движения полноприводной колёсной машины по несвязным грунтам // Труды НАМИ. Автомобили и двигатели. Сборник научных трудов. Выпуск 241. М., изд. ГНЦ РФ ФГУП «НАМИ». – 2009. – С.25-39.
6. Котиев Г.О., Горелов В.А., Жирный Р.И. Математическая модель прямолинейного движения автопоезда с жесткой и гибкой связью между звеньями // Труды НГТУ. – 2010 - №3. – С.138-144.
7. Серебренный И.В., Котиев Г.О. Повышение проходимости автомобиля за счёт рационального распределения потоков мощности по колёсам // Вестник МГТУ им. Н.Э. Баумана. Машиностроение. - 2008. - Специальный выпуск. - С.193-201.
Публикации с ключевыми словами: математическая модель, имитационное моделирование, проходимость, автопоезд, сцепное устройство, буксование, тягово-энергетическая характеристика
Публикации со словами: математическая модель, имитационное моделирование, проходимость, автопоезд, сцепное устройство, буксование, тягово-энергетическая характеристика
Смотри также:
- 77-30569/343394 Математическое моделирование движения многозвенных колесных транспортных комплексов с учетом особенностей конструкций сцепных устройств
- Оценка эффективности законов управления индивидуальным приводом движителей колесных транспортных комплексов
- Прогнозирование характеристик криволинейного движения многоосной колесной машины при различных законах всеколесного рулевого управления
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||