научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 02, февраль 2012
УДК 629.78
МГТУ им. Н.Э. Баумана
Введение
Вопросы динамики и управления деформируемым космическим аппаратом (ДКА) достаточно хорошо изучены. Проблема ДКА (упругого КА) выделилась по существу в самостоятельный раздел механики, находящийся на стыке динамики относительного движения деформируемого тела и динамики конструкций и изучающий поведение упругой управляемой системы с переменной конфигурацией под действием управляющих и возмущающих сил и моментов.
Рассматривая КА как элемент информационной системы, необходимо указать на глубокую и многопараметрическую связь между качеством и количеством информации в системе и конкретными сочетаниями проектных параметров и компоновочных решений при условии, что конструкция КА не может быть представлена как абсолютно жесткая. Поэтому целесообразно изучить наиболее характерные случаи влияния упругости конструкции на характеристики информационного канала.
Наиболее действенными методами оценки состояния системы и прогнозирования его изменения во времени являются методы технической диагностики. Техническая диагностика решает задачи распознавания состояния системы, причин нарушения работоспособности изделий. Сложность этих задач заключена в том, что для получения большей достоверности анализ технического состояния и его изменения необходимо проводить в эксплуатационных условиях, т.е. в условиях ограниченной информации.
Среди многочисленных исследований, посвящённых технической диагностике, мало работ, в которых расматриваются конкретные проблемы построения диагностических моделей, моделей изменения технического состояния. Практически отсутствуют исследования по вибродиагностике механических систем в целом, в том числе по вибродиагностике ДКА.
В зависимости от назначения КА являются носителями различного типа датчиков информации. Наиболее часто для получения информации используется регистрация элетромагнитных волн различного спектра (оптические, телевизионные, радиолокационные сигналы и т.п.). Очевидно, что колебания упругой конструкции КА оказывают влияние на качество принимаемого сигнала, вызывая колебательные движения носителя приемника информации - корпуса КА. Таким же образом взаимные колебания линии визирования антенн связи и оси диаграмм направленности электромагнитного излучения, обусловленные упругостью конструкции, приводят к появлению помех или снижению уровня сигнала в системе.
Для наблюдательных процессов величина помехи зависит в основном от качества углового движения КА, поскольку изменяющаяся во времени ошибка ориентации приводит к неточному положению объектов на фотоснимке или на телевизионном кадре, наличие вариаций угловой скорости - к сдвигу изображения относительно регистрирующей среды и, следовательно, к снижению разрешения и контрастности. Во многих теоретических разработках большие упругие системы механических элементов КА моделируются в виде связанных между собой твёрдых тел или в виде твёрдого тела, имеющего упругие ответвления [1]. Для крупногабаритных космических конструкций более пригодной может оказаться континуальная модель [2, 3, 4], поскольку размерность ее меньше размерности системы связанных тел. Широко известны такие расчётные модели упругих присоединённых элементов конструкции деформируемых космических аппаратов как, например, штанги с грузом, консольная балка, солнечные батареи, конечноэлементная модель, составное тело и др.
Предлагается рассмотреть достоинства модели управляемого ДКА, представляющую собой сплошное деформируемое тело, то есть континуальный вариант модели КА с активной системой ориентации, который обладает резко выраженными резонансными свойствами.
При исследовании динамики упругого КА как элемента информационной системы возникает задача оценки адекватности используемых моделей движения реальному движению аппарата. При этом различают задачи структурной и параметрической идентификации. Основной отличительной чертой этого метода является необходимость наблюдения над входными и выходными сигналами. Эта особенность является препятствием к использованию данного метода для оценивания параметров математической модели ДКА в форме колебательной системы с внешним возбуждением, поскольку параметры движения упругих элементов ‑ упругие перемещения, скорости и ускорения ‑ не измеряются. Поэтому число неизвестных коэффициентов идентифицируемой модели по размерности существенно больше фазового пространства измеряемых параметров. Кроме того, методы идентификации не позволяют определить источники собственных возмущений анализируемого объекта.
Эффективными методами, которые обеспечивают контроль технического состояния КА в условиях функционирования и позволяют определить собственные возмущения, являются методы технической диагностики. Под диагностикой, и, в частности, вибродиагностикой, будем понимать такой процесс, когда параметры системы определяются только по выходным реакциям. Таким образом, задача диагностики является более общей по сравнению с задачей идентификации. Методы диагностики целесообразно использовать тогда, когда возмущающие воздействия ненаблюдаемы.
Рассматриваемые методы вибродиагностики основаны на предположении, что модель или возможный перечень моделей диагностируемого объекта известен. Целью диагностики является определение параметров этой модели в процессе нормального функционирования космического аппарата. При этом интерес представляет форма модели в виде динамических уравнений Эйлера, предназначенная для описания движения твёрдого тела относительно центра масс. Деформации упругого космического аппарата считаются достаточно малыми.
Для большого класса электромеханических и механических утройств математической моделью вибродиагностики является дифференциальное уравнение с малыми переменными параметрами, что должно быть справедливо также и для упругого КА .
Дифференциальное уравнение, характеризующее техническое состояние электромеханической системы в процессе исследования вибраций, обычно имеет вид векторно-матричного уравнения
![]() (1)
(1)
где z- вектор, характеризующий техническое состояние системы; M0, G0, P0 - матрицы с неизменяющимися во времени коэффициентами; G(t,µ) , P(t,µ) - матрицы с периодически изменяющимися во времени коэффициентами; µ - малый параметр; f(t) - вектор возмущения.
В работе [4] аналогичная модель использована для анализа устойчивости больших упругих вращающихся тел, предложены простые критерии устойчивости при наличии малых нелинейностей, показывается, что структурное демпфирование является существенным фактором усиления устойчивости, хотя и малоэффективно в отношении самых низких частот и, наконец, установлено существование критических значений коэффициентов демпфирования, гарантирующих устойчивость.
Таким образом, выбирая структуру модели большого упругого КА с электромеханической системой управления движением относительно центра масс, вполне можно полагаться на традиционную для вибродиагностики модель типа (1). К достоинствам этой модели можно отнести существование теории классических уравнений Матье-Хилла, включая таблицы функций Матье и диаграммы Айнса-Стретта, а также последние достижения в области проекционных методов исследования нестационарных систем автоматического управления, основанных на применении матричных операторов интегрирования, умножения и дифференцирования в выбранном базисе [6].
В работе [3] рассмотрено уравнение движения большого КА в центральном ньютоновском гравитационном поле. Аппарат моделируется упругой сплошной средой, обладающей внутренним демпфированием. Предполагается, что тело достаточно жёсткое, а время затухания его свободных упругих колебаний много меньше характерного времени движения тела как целого. С помощью основных теорем динамики и уравнений Лагранжа второго рода получена замкнутая система дифференциальных уравнений с нестационарной матрицей тензора инерции тела, описывающая движение такой среды. Эти уравнения совпадают с известными уравнениями Сантини. В качестве примера изучались плоские квазистатические движения тела относительно центра масс.
1.Постановка задачи вибродиагностики упругих космических аппаратов
В статье [ 2 ] для случая плоского движения приведена математическая модель колебаний метеоспутника ”Интеркосмос-Болгария 1300” при движении привода солнечных батарей, которая имеет форму именно уравнения (1). Порождающее решение этого уравнения вида функции Матье ce4(t,2) оказывается функцией сравнения для измеренной угловой скорости корпуса аппарата относительно оси вращения привода солнечных батарей.
Общие уравнения движения ДКА относительно центра масс, состоящие из динамического уравнения Эйлера и уравнений замыкания, включают в себя результирующий момент внешних сил M, матрицу моментов инерции θ, вектор угловой скорости ω, а также вектор кинетического момента H имеют вид:
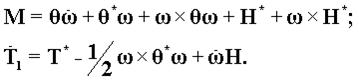
Здесь Ť1- производная кинетической энергии ДКА в инерциальной системе координат;
H*, T*, θ*- локальные производные. Анализ первого закона термодинамики совместно с этими уравнениями позволяет получить уравнения замыкания на основе дискретизации сплошной среды приемом, именуемым методом Канторовича.
Постановка задачи в кратком изложении выглядит как сравнение двух форм представления моделей, а именно:
А. Модель возмущений в форме моментов сил:
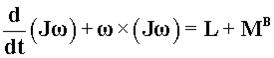 .
.
Здесь J-матрица моментов инерции жёсткого тела, L- вектор управляющего момента, Mв вектор возмущающего момента.
Б. Модель возмущений в форме моментов инерции:

В этой модели ΔΘ(t) – ‘это обозначение переменной составляющей матрицы θ моментов инерции ДКА, причём предполагаем, что ![]()
Требуется решить следующие задачи:
1. Доказать эквивалентность моделей А и Б.
2. Определить условия эквивалентности.
3. Построить алгоритм эквивалентного преобразования моделей.
2. Условия эквивалентности моделей А и Б .
Известно, что возмущающие моменты в уравнении движения космического аппарата могут иметь как внешнее, так и внутреннее представление [5]. Например, гироскопические моменты в динамическом уравнении Эйлера записываются в параметрической форме слева от знака равенства, хотя не представляет большого труда записать их и в правой части уравнения в форме внешнего воздействия. Если на основании априорной информации можно сделать определенные выводы о характере производной кинетического момента, то поведение ДКА при действии возмущающих факторов интегральным образом можно определить с помощью параметров уравнения. В качестве таких параметров используются моменты инерции. Таким образом, динамические уравнения Эйлера с переменными моментами инерции обладают большой общностью.
Теорема Еругина о приводимости линейных систем с периодическими коэффициентами при помощи преобразования Ляпунова является еще одним доказательством допустимости эквивалентного преобразования модели А в модель Б .
Поскольку динамические уравнения Эйлера непосредственно получаются из закона сохранения энергии, а также из закона сохранения кинетического момента, то каждый из этих законов может служить критерием эквивалентности преобразования форм представления моделей ДКА. Далее эквивалентное преобразование строится на предположении об инвариантности кинетической энергии тела при его деформации.
3.Алгоритм эквивалентного преобразования моделей ДКА.
Вибродиагностика вариации матрицы моментов инерции может быть реализована при помощи метода моментов [6, 7, 8]., для чего рассмотрим следующие далее соотношения.
Введём в рассмотрение матрицу главных центральных моментов инерции (ММИ):
![]() ,
,
где J- ММИ жёсткого тела,
V1(t), V2(t) - ММИ вынуждающей силы,
W(t) - ММИ параметрического возбуждения.
Уравнения замыкания модели ДКА записываются при помощи обобщенных координат q l для случая околорезонансных колебаний на основании первого закона термодинамики
![]() ,
,
где Cl, Dl - коэффициенты обобщенной комплексной жесткости ДКА;соответствующие обобщенные силы имеют вид

Условие эквивалентности моделей ДКА, связанное с законом сохранения энергии, получается в результате разделения переменной ω на медленную ώ и быструю ( ω− ώ ) составляющие . В случае одноосных колебаний кинетическая энергия быстрых ( упругих ) колебаний приобретает форму преобразования, связанного с расщеплением вектора угловой скорости:

Уравнение процедуры расщепления:
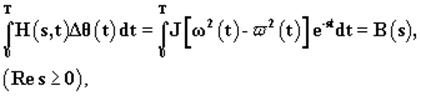
где ![]() - ядро интегрального уравнения, s - комплексная переменная.
- ядро интегрального уравнения, s - комплексная переменная.
Метод моментов позволяет восстановить оригинал изображения ![]() по известным моментам;
по известным моментам;
![]()
4. Алгоритм машинного анализа задачи
Алгоритм машинного анализа задачи вибродиагностики состоит из последовательности перечисленных далее операций:
-разложение в ряд Фурье отсчетов функции ω(t), t € [0,T];
-вычисление энергетического спектра Sω(λ);
-разложение в ряд Фурье отсчетов функции ώ(t), t € [0,T];
-вычисление энергетического спектра Sώ(λ);
-построение системы линейно независимых функций;
-образование системы проекционных функций;
-синтез базовой ортонормированной системы функций;
-вычисление моментов μ ;
-построение функции Δθ(t) .
При современном подходе к конструированию [1] выбор элементов и их характеристик производится с учётом их основного функционального предназначения. При этом часто не учитывается тот факт, что вариации параметров системы приводят не только к отклонению основных показателей качества, но и к появлению дополнительных движений и процессов, например, вибрационных. В случае, когда вариации параметров являются неконтролируемыми, что возникает, например, при сборке и эксплуатации, эти дополнительные движения являются нежелательными. Их можно компенсировать активными и пассивными способами. Активные способы реализуются в адаптивных ( самонастраивающихся ) системах, а также с помощью устройств виброгашения. Для рассматриваемых механических и электромеханических устройств активное виброгашение и адаптация могут осуществляться с помощью динамических гасителей колебаний, регулируемых упругих подвесов и виброизоляторов.
Результаты диагностики целесообразно применять в автоматизированных устройствах с целью формирования информационных сигналов для управления режимами работы элементов. Рассматриваемые механические и электромеханические системы являются, как правило, исполнительными устройствами систем управления, поэтому данные диагностики их технического состояния могут использоваться при принятии решения об изменении режимов их работы, а также о включении резервных блоков.
Выводы.
Таким образом, получена полная универсальная физическая модель управляемого ДКА в форме динамических уравнений Эйлера с переменной матрицей тензора инерции. Решена задача замыкания уравнений движения. Найден конструктивный метод идентификации переменной матрицы тензора инерции на основе эквивалентного спектрального преобразования моделей методом моментов. Показано, что резонансные колебания ДКА имеют полезную интерпретацию в форме параметрических колебаний, которая получает развитие в теории устойчивости движения управляемых ДКА. Уравнение рассматриваемого ДКА можно использовать для решения задач вибродиагностики на основе имитационного моделирования.
Литература
1. Титов Б.А., Вьюжанин В.А., Дмитриев В.В. Формирование динамических свойств упругих космических аппаратов. М.: Машиностроение, 1995. 304 с.
2. Дмитриев А.Н., Сенькин А.В., Сургунд А.С., Беляев В.П. Идентификация резонансности ИСЗ “Интеркосмос-Болгария 1300” // Конструирование приборов для изучения космоса. М.: Наука, 1985. С. 81-85.
3. Маркеев А.П. К динамике упругого тела в гравитационном поле // Космические исследования. 1989. Т. 27. Вып. 2. С. 163-175.
4. Maharana P.K., Shrivastava S.K. Stability of large flexible damped spacecraft modeled as elastic continua // Acta Astronautica. 1976. Vol. 11. No.2. P. 103 - 109.
5. Солодовников В.В., Дмитриев А.Н. Фаронов В.В., Гриднев Г.Ф. Вопросы построения систем ориентации и стабилизации. - // VI Симпозиум ИФАК “Управление в пространстве”. Доклады. Секция IV. Ереван, 1974.
6. Солодовников В.В., Дмитриев А.Н., Егупов Н.Д. Спектральные методы расчета и проектирования систем управления. М.: Машиностроение, 1986.
7. Мирович. Принцип стационарности в задаче о собственных значениях для вращающихся конструкций // Ракетная техника и космонавтика, 1976, т.14, №10. С. 56-64.
8. Сенькин А.В. Вопросы вибродиагностики упругого космического аппарата // Проблемы теории и практики в инженерных исследованиях. Труды XXXIII научной конференции РУДН. М.: РУДН, 1997. С. 223-225.
Публикации с ключевыми словами: космический аппарат, вибродиагностика, динамические уравнения Эйлера, моменты инерции
Публикации со словами: космический аппарат, вибродиагностика, динамические уравнения Эйлера, моменты инерции
Смотри также:
- 77-30569/2229653 Моделирование сценариев оперативного управления полетом космического аппарата
- Вопросы минимизации затрат суммарной характеристической скорости, необходимой для обслуживания и восполнения спутниковых систем на некомпланарных круговых орбитах
- Системный синтез интеллектуальных систем управления космических аппаратов и комплексов
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||