научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 01, январь 2012
DOI: 10.7463/0112.0300281
УДК.621
МГТУ им. Н.Э. Баумана
Введение
Насосные магистральные агрегаты служат для перекачки нефти. На рис. 1 представлен насосный агрегат, работающий на одной из станций по перекачке нефти. Насосный агрегат состоит из насоса 1, электродвигателя 2 и рамы агрегата 3. Рама агрегата посредством упругих опор 5 крепится к бетонному основанию. К насосу жестко присоединены подводящая и отводящая трубы 4.

Рис. 1. Насосный агрегат НМ
Ввиду того, что давления в подводящей и отводящей трубах значительны и соответственно равны ![]() , рама насосного агрегата подвержена действию большой по величине сдвигающей силы. В конструкции насосного агрегата, представленного на рис. 1, эту негативную силу воспринимают на себя подводящая и отводящая трубы и насос 1. Через болтовые соединения, действие сдвигающей силы передается на раму агрегата, а затем на упругие опоры, которые работают только на сжатие. Т. е. сдвигающая сила оказывает негативное действие на упругие опоры.
, рама насосного агрегата подвержена действию большой по величине сдвигающей силы. В конструкции насосного агрегата, представленного на рис. 1, эту негативную силу воспринимают на себя подводящая и отводящая трубы и насос 1. Через болтовые соединения, действие сдвигающей силы передается на раму агрегата, а затем на упругие опоры, которые работают только на сжатие. Т. е. сдвигающая сила оказывает негативное действие на упругие опоры.
Таким образом, в конструкции насосного агрегата, представленного на рис. 1, не предусмотрены элементы, способные компенсировать негативную сдвигающую силу.
Данная статья посвящена исследованию влияния этой сдвигающей силы на раму агрегата и разработке системы стабилизации платформы насосного агрегата.
Определение величины сдвигающей силы
Если освободить насос от труб, то на агрегат будет действовать сила ![]() , по величине равная
, по величине равная
где ![]() давления на входе в насос и на выходе из насоса;
давления на входе в насос и на выходе из насоса;
![]() площади сечений подводящей и отводящей труб.
площади сечений подводящей и отводящей труб.
Подсчитанная по формуле величина силы ![]()
Здесь важно отметить, что часть этой силы воспринимают подводящие трубы.
Для того чтобы оценить величину силы, непосредственно приходящуюся на раму агрегата была разработана следующая схема (рис. 2).
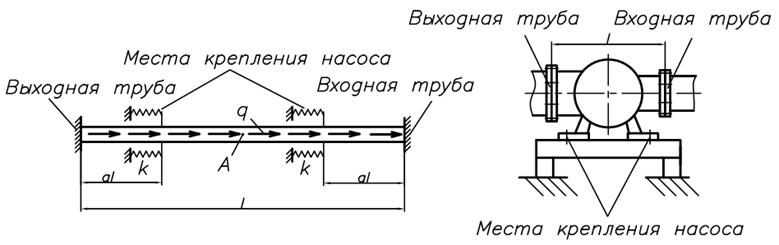
Рис. 2. Схема для расчета силы, приходящейся на раму агрегата
Слева на рис. 2 изображена схема аппроксимирующая насос, а справа на рис. 2 изображен схематично сам насос на раме агрегата. В расчетной схеме, насос заменяется стержнем, который подвержен действию распределенной нагрузки ![]() , по величине равной
, по величине равной

где ![]() это сила, рассчитанная по формуле ,
это сила, рассчитанная по формуле ,
![]() это расстояние между местами стыков насоса и труб.
это расстояние между местами стыков насоса и труб.
Места крепления насоса к раме агрегата, болты, в аппроксимирующей схеме заменяются пружинами жесткостью ![]() .
.
Параметр ![]() и длина
и длина ![]() определяются из реальных размеров насоса.
определяются из реальных размеров насоса.
Тогда с учетом принятой схемы, сила, которая непосредственно действует на раму агрегата, будет определяться суммарной реакцией в местах крепления насоса, то есть реакцией в пружинах на аппроксимирующей схеме (рис. 2) слева: ![]() , где сила
, где сила ![]() реакция в одном месте крепления.
реакция в одном месте крепления.
Расчетом была определена сила, непосредственно действующая на раму агрегата,
При подстановке известных значений в формулу , имеем ![]()
Таким образом, будем исследовать влияние силы ![]() на раму агрегата.
на раму агрегата.
Влияние сдвигающей силы на раму агрегата
Для оценки влияния сдвигающей силы на раму агрегата была создана конечно-элементная модель рамы (рис. 3) и проведен расчет в комплексе Ansys 12 Workbench.

Рис. 3. Конечно-элементная модель агрегата
Насос и электродвигатель в модели были заменены жесткими пластинами. Плотность материалов насоса и электродвигателя была подобрана таким образом, чтобы массы насоса и электродвигателя соответствовали массам по паспорту.
На рис. 4 приведены результаты расчетов.

Рис. 4. Поле эквивалентных напряжений и перемещений в раме
Значения максимального напряжения и перемещения в раме:
![]()
Видно, что значения напряжения и перемещения – значительные. Наибольший сдвиг, как видно из рис. 3, возникает в упругих опорах рамы. Т.е. сдвигающая сила оказывает негативное влияние на упругие опоры.
Расчет был проведен лишь для того, чтобы показать необходимость стабилизации рассматриваемой платформы.
Также следует отметить, что если сдвигающую силу не компенсировать силами противодействия, то между осями роторов насоса и электродвигателя не будет наблюдаться достаточной соосности.
Соосность роторов насоса и электродвигателя была оценена по схеме, представленной на рис. 5.
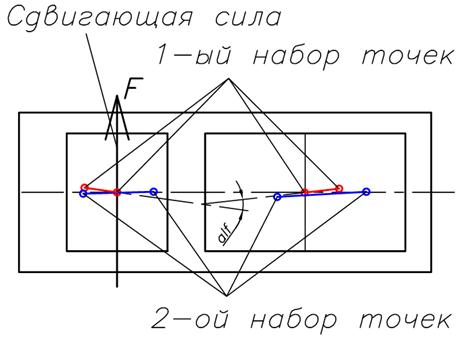
Рис. 5. Схема определения соосности роторов насоса и электродвигателя
В комплексе Ansys 12 было проведено два расчета и результаты расчета - это перемещения точек, лежащих на осях насоса и электродвигателя и отмеченных на рис. 5. Перемещения определялись в плоскости насоса и электродвигателя. Затем перемещения были пересчитаны в угол поворота ![]() . По величине угла, оценивалась соосность роторов.
. По величине угла, оценивалась соосность роторов.
Таким образом, подсчитанное значение соосности роторов, от действия негативной сдвигающей силы, ![]() .
.
Из вышесказанного следует, что существует три негативных действия сдвигающей силы на агрегат:
1) негативное действие на упругие опоры;
2) негативное влияние на соосность роторов электродвигателя и насоса;
3) негативное влияние на подводящую и отводящую трубы.
Можно предложить различные схемы компенсации негативной сдвигающей силы, которые сводятся к приложению пары сил исключающих перемещение платформы в пространстве как жесткого целого. Но при этом возникает необходимость оценки несоосности роторов насоса и электродвигателя от действия на раму агрегата трех сил: негативной сдвигающей силы и двух компенсирующих сил, показанных на рис. 6a.
Таким образом, рама агрегата подвержена действию сдвигающей силы и сил компенсирующих.
Определим величины и положение компенсирующих сил.
Определение величин и положения компенсирующих сил
Для определения величин и положения компенсирующих сил зафиксируем центр вращения рамы агрегата и свяжем с ним действующие на раму силы, рис. 6а.
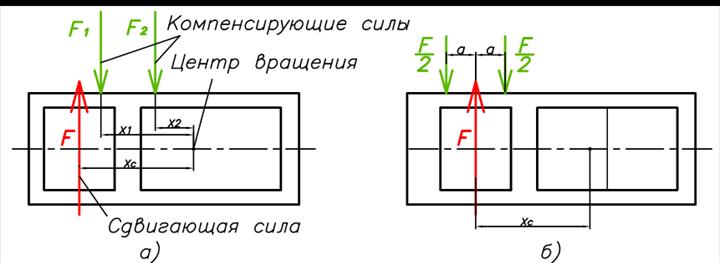
Рис. 6. Положение сил относительно предполагаемого центра вращения
Запишем уравнение равновесия сил и моментов:

Принимаем, что силы ![]() и
и ![]() равны, и тогда наиболее простое решение системы уравнений будет следующим:
равны, и тогда наиболее простое решение системы уравнений будет следующим:

Решение изобразим на рис. 6б. В решении величина параметра ![]() неизвестна. Для определения этого параметра была проведена оптимизация положения компенсирующих сил по параметру соосности роторов насоса и электродвигателя.
неизвестна. Для определения этого параметра была проведена оптимизация положения компенсирующих сил по параметру соосности роторов насоса и электродвигателя.
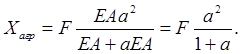
Оптимизация положения компенсирующих сил
В процессе оптимизации исследовались различные положения компенсирующих сил (рис. 7) и для каждого положения по схеме на рис. 5 определялась соосность роторов насоса и электродвигателя ![]() .
.
Из конструктивных соображений было выбрано начальное положение компенсирующих сил ![]() , ввиду того, что в реальной конструкции в этом геометрическом месте расположена подводящая труба.
, ввиду того, что в реальной конструкции в этом геометрическом месте расположена подводящая труба.
Расчет был проведен в комплексе Ansys 12. Пересчет перемещений в угол поворота был проведен в среде Matlab.
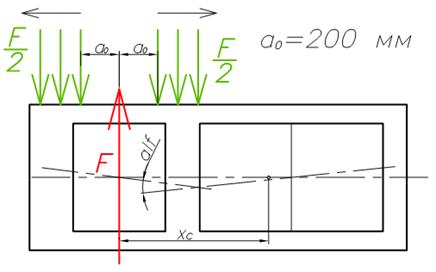
Рис. 7. Схема оптимизации положения компенсирующих сил
Результаты решения задачи
Как уже отмечалось ранее, расчеты были проведены для двух наборов точек (рис. 5).
На рис. 8 представлены результаты решения задачи оптимизации.
Рис. 8. Результаты решения задачи
На рис. 8 по оси Xотложена координата от линии приложения сдвигающей силы, а по оси Yвыведен угол поворота, соосность. На рис. 8 также выделены зоны, где угол поворота минимальный. Таким образом, установки, создающие компенсирующие силы, следует располагать именно в этих областях.
Зоны размещения силовых установок:
зона 1 (![]() ),
),
зона 2 (![]() ).
).
Следует отметить, что с помощью данного метода компенсации удалось сильно снизить взаимный угол поворота роторов: ![]()
Дальнейшее исследование данной проблемы сводится к конструированию модернизированной рамы агрегата, которая в себе содержала бы устройства для создания компенсирующих сил, а также сводится к уточнению величины сдвигающей силы, т.е. к уточнению схемы, представленной на рис. 2.
Библиографический список:
1. Агрегаты электронасосные центробежные нефтяные магистральные типа "НМ" / паспорт, 1978. – 75 с.
2. http://www.ufarotor.ru/Good16_5_7.aspx. Проверено 16.05.2011.
3. Басов К.А. ANSYS в примерах и задачах / Под общ. ред. Д.Г.Красковско-го. – М.: Компьютер пресс, 2002. – 224 с.
4. Работнов Ю.Н. Сопротивление материалов. – М.: Физматгиз, 1962. – 456 с.
Публикации с ключевыми словами: система стабилизации, магистральный насосный агрегат, виброизоляция
Публикации со словами: система стабилизации, магистральный насосный агрегат, виброизоляция
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||