научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 12, декабрь 2011
УДК 681.5.01
МГТУ им. Н.Э. Баумана
ВВИА им. профессора Н.Е. Жуковского и Ю.А. Гагарина
Основой публикации являются результаты проведенных исследований по разработке метода и средств выработки требований к навигационному оборудованию, информационному обеспечению и системе управления полетом летательных аппаратов (ЛА) воздушной разведки, обеспечивающих в совокупности требуемое качество регистрируемых аэрофильмов. Исследование проведено с учетом принципиальных (теоретических) ограничений возможностей комплексов воздушной разведки и информационных технологий, обеспечивающих решение задач регистрации данных воздушной разведки и обнаружения (распознавания).
Для удобства ознакомления материалы публикации изложены в цикле из двух статей. В настоящей статье на основе обзора и анализа комплексов, включающих пилотируемые и беспилотные ЛА – носители средств воздушной разведки. Во второй статье «Метод системного анализа аппаратуры и режимов аэрофоторазведки» рассматриваются вопросы учета режимов аэрофоторазведки и методов восстановления смазанных и дефокусированных изображений.
Во второй статье рассматриваются аэрофотоаппаратура АФА, системы стабилизации положения АФА на различных носителях и системы привязки аэрофильмов к той или иной системе координат.
При проведении исследований сделана попытка применить системный анализ комплексов воздушной разведки, построенных на основе применения аэрофотоаппаратов (АФА) и, в частности, цифровых АФА. Целями такого анализа являются:
· Обеспечение разработки (проектирования) полетного задания для ЛА разведки, находящихся в эксплуатации.
· Обеспечение процесса проектирования перспективных комплексов с учетом реальных условий эксплуатации.
Задачи решаются на основе анализа:
· ЛА – носителей средств воздушной разведки.
· Аппаратуры воздушной разведки.
· Основных факторов навигации ЛА и свойств аэрофотоаппаратов, определяющих качество аэрофильмов при различных режимах воздушной разведки.
· Особенностей предварительной обработки аэрофильмов на борту ЛА.
· Особенностей информационных систем обработки разведданных и подготовки разведдонесений.
Качество регистрации и обработки аэрофильмов оценивается по следующим критериям:
· Разрешение на местности. Этот фактор обусловлен качеством подсистем компенсации смаза, дефокусировки и фильтрации вибраций аэрофотоаппаратуры.
· Точность привязки кадра аэрофильма к определенной системе координат.
1. Анализ современных и перспективных комплексов воздушной фоторазведки
1.1 Основные типы известных и перспективных ЛА воздушной разведки
1.1.1 Пилотируемые ЛА с комплексами воздушной разведки [1.2.3]
1.1.1.1 Техническое описание самолета Ан-24 ФК
Аэрофотосъемочный самолет Ан-24ФК является модификацией серийного пассажирского самолета Ан-24 и предназначен для выполнения воздушного фотографирования территорий в картографических целях. На каждой половине руля высоты установлен триммер, на руле направления - триммер и пружинный сервокомпенсатор. Руль высоты и руль направления имеют осевую аэродинамическую компенсацию и стопроцентную весовую балансировку.
Управление рулями и элеронами осуществляется посредством жестких тяг, управление триммерами руля высоты - тросовое. В систему управления рулями, элеронами и триммерами руля высоты включены рулевые машинки автопилота. Пилотажно-навигационное оборудование то же что и на серийном Ан-24. На борту установлен автопилот АП-28Л1Ф (модификация автопилота АП-28Л1), обеспечивающий автоматическое программное пилотирование самолета при выполнении аэрофотосъемки. В состав радиоэлектронного оборудования входят радиокомпасы АРК-5 №1 и №2, радиовысотомер РВ-2. Кроме того, установлены автомат программного разворота АПР-2, доплеровский измеритель угла сноса и путевой скорости ДИСС-3А "Стрела", курсовая система КС-6К, астрокомпас ДАК-ДБ-58, радиовысотомер больших высот РВ-25. Аэрофотосъемочное оборудование включает аэрофотоаппараты АФА-ТЭ-100 и 70 в гиростабилизирующей установке Н-55, аэрофотоаппараты АФА-41/7, 5, АФА-41/10, 20 и АФА-42/20 в плановых аэрофотоустановках топографический радиовысотомер РВТД-А, статоскоп С-51, электронный командный прибор ЭКП-2, аэроэкспонометр АЭ-2, визиры НКПБ-7.
1.1.1.2 Самолет воздушного наблюдения и аэрофотосъемки Ан-30
Этот самолет является дальнейшей модификацией самолетов Ан-24 и Ан-26 и предназначен для аэрофотосъемочных и аэрогеофизических работ. Аэрофотосъемка выполняется в масштабе от 1:5000 до 1:200000 аппаратами с различными фокусными расстояниями. Возможна обработка фотопленки прямо на борту самолета. В носовом подфюзеляжном обтекателе возможно размещение метеорадиолокатора “Гроза-30”.
Таблица 1.Летно-технические характеристики
Скорость крейсерская | 435 км/ч |
Скорость максимальная | 540 км/ч |
Наивыгоднейшая высота | 6000 м |
Практический потолок | 8300 м |
Дальность пригоночная | 2630 км |
Дальность действия | 1240 км |
Максимальный взлетный вес | 23000 кг |
Максимальный посадочный вес | 23000 кг |
Масса пустого самолета | 15590 кг |
Вес фотооборудования |
|
1.1.1.3 Су-24МР
Фронтовой разведчик Су-24МР (Т-6Р) является модификацией истребителя Су-24. Главной нагрузкой самолета Т-6Р, не несущего ударного вооружения, стал базовый комплекс разведки БКР-1. Су-24МР должен производить съем информации с предельно малых высот и на «дозвуке» (рабочий режим).
Специализированный самолет комплексной воздушной разведки Су-24МР используется для выполнения разведывательных задач в интересах командования сухопутный войск и фронтовой авиации, а на приморских направлениях - в интересах Военно-морского флота.
Самолет обеспечивает всепогодную комплексную воздушную разведку днем и ночью, с учетом условий применения и возможностей разведывательной аппаратуры, на глубину до 400 км от линии боевого соприкосновения с противодействием средствам ПВО противника.
Су-24МР не имеет среди зарубежных фронтовых разведчиков аналогов по комплексности получаемой развединформации. Например, на самолетах RF-4C, составляющих основу тактической разведывательной авиации ВВС США, используются ИК станция AN/AAS-18, РЛС бокового обзора AN/APQ-102, несколько АФА для плановой и перспективной съемки с больших и малых высот. Для радиотехнической разведки используются подвесные системы AIL AN/ALQ-61 или Литтон AN/ALQ-125, но отсутствуют средства лазерной и радиационной разведки. Причем американский разведчик, более легкий и с крылом фиксированной стреловидности, существенно уступает Су-24МР в дальности полета и скорости на малых высотах.
По летным характеристикам к Су-24МР приближается английский разведчик «Торнадо» GR.1A, также модифицированный из истребителя-бомбардировщика с крылом изменяемой стреловидности. Но «Торнадо» GR.1A задуман как разведчик с сохранением боевых возможностей и оснащен лишь ИК системой разведки TTRRS (Tornado Infra-Red Reconnaissance System) панорамного и бокового обзора вместо пушек.
Передаваемая и доставляемая разведывательная информация снабжается навигационными данными для ее привязки по координатам местоположения самолета и времени. Прием, обработка и дешифровка происходит на наземном комплексе. Это реалистичный и, по-видимому, единственно верный для существующей аппаратуры подход. (На английском разведчике «Торнадо» GR.1A полученная разведывательная информация записывается на видеоленту и может воспроизводиться на небольшом ТВ-индикаторе в кабине штурмана-оператора почти в реальном времени.
Разведывательное оборудование самолета состоит из:
· радиолокационной станции бокового обзора "Штык";
· аппаратуры телевизионной разведки "Аист-М";
· инфракрасного разведывательного оборудования "Зима";
· системы лазерной разведки "Шпиль-2М";
· станции общей радиотехнической разведки "Тангаж";
· аппаратуры радиационной разведки "Эфир-1М";
· аэрофотоаппаратов АП-402 панорамной и А-100 перспективной съемки.
Для оперативной передачи на наземный приемный пункт разведывательной информации от телевизионного, теплового и лазерного средств разведки на самолете установлен широкополосный радиоканал ШРК-1.
Для временной увязки разведывательных данных в состав оборудования самолета включена система единого времени "Севан ".
Аппаратура лазерной разведки "Шпиль-2М" предназначена для ведения разведки местности с малых высот в любое время года и суток. Обеспечивает выдачу информации для передачи ее на наземный пункт, а также фоторегистрацию на борту. Аппаратура размещается в подвесном контейнере.
Кадровый аэрофотоаппарат А-100 предназначен для перспективной аэрофотосъемки с малых высот, устанавливается в отсеке под левым воздухозаборником. Панорамный фотоаппарат АП-402 служит для выполнения аэрофотосъемки широкой полосы местности, размещен на лафете под центральной частью фюзеляжа. Проявленный на борту фотоматериал вбрасывается на землю в специальной капсуле.
Таблица 2. Основные тактико-технические данные ЛА
Модификация | Су-24МР |
Масса, кг |
|
пустого самолета | 22100 |
нормальная взлетная | 33300 |
максимальная взлетная | 39700 |
Максимальная скорость, км/ч |
|
на высоте | 1430 |
у земли | 1320 |
Боевой радиус действия, км | 650 |
Практический потолок, м | 11100 |
1.1.1.4 МиГ-25РБ (изд.02Б)
Одноместный всевысотный самолет оперативной разведки — бомбардировщик, создан на базе разведчика МиГ-25Р и предназначен для ведения воздушной фото- и радиотехнической разведки и нанесения ударов по площадным наземным целям. Кроме этого разработан дpyгой ваpиант обоpyдования: с использованием 2 АФА А-72 для детальной pазведки с yзкой полосой съемки.
Таблица 3.Тактико-технические характеристики ЛА
Масса, кг: | взлётная нормальная — 37100 взлётная максимальная — 41200 |
Скорость, км/ч: | отрыва — 360 максимальная у земли — 1200 максимальная на высоте 13000 м — 3000 посадочная — 290 |
Практический потолок, м: | 23000 |
Аэрофотооборудование устанавливается на самолетах МиГ-25Р/РБ/РБВ/РБТ. Оно подразделяется на три взаимозаменяемые комплектации аэрофотоаппаратов.
1. Комплектация для общей дневной разведки:
· Аэрофотоаппарат А-70М
· Аэрофотоаппарат А-Е/10
· Светоприемное устройство СУ5
· Фоторегистратор координат ФК-5
2. Комплектация для детальной дневной разведки:
· Аэрофотоаппарат А-72
· Аэрофотоаппарат А-Е/10
· Светоприемное устройство СУ5
· Фоторегистратор координат ФК-5
3. Комплектация для ночной разведки (возможно фотографирование днем и в сумерки):
· Аэрофотоаппарат НА-75
· Фоторегистратор координат ФК-5
1.1.1.5 Самолеты-разведчики США. Характерные представители
Американский стратегический дальний разведчик «Локхид A-11, тип СР-71», называемый "Блэкберд", по существу, является преемником эксплуатировавшегося с 1956 г. «Локхида У-2». Этот самолет-разведчик оснащен самым современным навигационным оборудованием, в том числе автономным астронавигационным устройством, позволяющим пилоту в любую секунду определять местонахождение самолета, а также счетчиком данных полета и бортовым компьютером, контролирующим движение по заданному маршруту. Разведоборудование, которым снабжен "СР-71 А", состоит из автоматической камеры дневного света, дополненной чувствительными инфракрасными сенсорами, чтобы вести разведку и делать цветные снимки подземных источников тепла (бункеров, ракетных шахт) в ночное время.
Американская летающая система раннего предупреждения и обнаружения называется "АВАКС" (Airborne Warning and Control System). Этот самолет-разведчик "Боинг Е-ЗА" не несет вооружения. Он создан на базе пассажирского "Боинга 707-320* и имеет 17 человек экипажа. На больших высотах его скорость достигает 966 км/ч, на низких - 483 км/ч. Может находиться в воздухе без дозаправки 13 часов и преодолеть расстояние 10 тыс. км, рейсовая высота полета - 14 тыс. м.
Самолет разведки RC 130 A. Основные технические характеристики, выбранные для решения задач анализа:
· Нормальная взлётная масса: около 53000 кг
· Предельная скорость на высоте: 3100 км/ч (2,6 М)
· Практическая дальность: до 4000 км (с использованием ТРДД без форсажа)
· Продолжительность полёта: до 5 ч
· Практический потолок: 29000 м
· Скороподъёмность: 60 м/с
Самолет не предназначен для ведения комплексной аэрофоторазведки. При необходимости снабжается аэрофотоаппаратурой и ИК камерами.
1.1.1.6 Основные результаты анализа проведенного обзора комплексов разведки с пилотируемыми ЛА
Анализ проведен с целью выявления основных существенных характеристик комплексов разведки с пилотируемыми ЛА, с учетом которых строится в дальнейшем математической модели динамики полета и управления. К этим особенностям можно отнести:
· Значительные значения массогабаритных характеристик.
· Наличие подсистем стабилизации положения разведывательной аппаратуры.
· Большое число задач привязки разведданных к системам координат, решаемых непосредственно на борту ЛА.
· Автономность навигационных систем
· Защита каналов передачи внешних данных координатной привязки.
Однако при реальном, зачастую нештатном режиме аэрофотосъемки полная компенсация смаза регистрируемого изображения может быть неполной. Учет этого фактора применительно к ЛА с высокими массогабаритными характеристиками осуществлен в разрабатываемой далее математической модели.
1.1.2 Комплексы воздушной разведки с беспилотными ЛА[4-16]
1.1.2.1 Обзор наиболее типичнных комплексов с БПЛА
Сравнительно новый тип беспилотных ЛА, вошедших в состав военной авиации ряда стран стал активно развиваться немногим более тридцати лет назад. По сравнению с пилотируемыми ЛА этот тип существенно дешевле за счет упрощенной конструкции и минимального состава бортового оборудования. Однако задача стабилизации режима работы АФА в составе комплексов имеет свою специфику и моделирование при проведении их системного анализа отличается от аналогичных задач применительно к комплексам с пилотируемыми ЛА.
В таблице 4 приводятся основные характеристики беспилотных комплексов воздушной разведки, отобранных в соответствии с задачами системного анализа. Поскольку многие «качественные» показатели этих комплексов меняются из года в год в сторону их улучшения с опорой на прототип, данные рассматриваются и в «историческом» аспекте.
Задачи, связанные с управлением полетом ЛА и с динамикой полета в режиме аэрофотосъемки, очевидно остаются низменными и уточняются в зависимости от весогабаритных характеристик и схемы упраления ЛА и положением АФА. Последнее подтверждается результатами обзора типичных комплексов воздушной разведки.
Таблица 4. Основные характеристики беспилотных комплексов воздушной разведки
Войсковое обозначение (комплекс) | Назначение | Начало эксплуата-ции | Построено | Примечание |
Ла-17Р (ТБР-1) | разведчик | >20 | ТБР – тактический беспилотный разведчик. С АФА АФБА-40 и АФБА-21, автопилотом АП-63 | |
Ту-123 «Ястреб» (ДБР-1) | сверхзвуковой дальний разведчик | 52 | на базе самолета-снаряда «С». С 3 длиннофокусными АФА-54, 1 панорамным АФА, станцией РТР СРС-6, | |
Ту-141 «Стриж» (ВР-2) | разведчик | 152 | Комплекс беспилотной оперативно-тактической разведки (фото -, ИК, ТВ, лазерной и радиационной). Вес БЛА – 5,37 т. Дальность полета – 950 км. | |
Ту-143 «Рейс» (ВР-3) | тактический разведчик | ~950 | Многоцелевой комплекс беспилотной тактической разведки (фототелевизионной и радиационной). | |
ПС-01 «Комар» | оперативный | (1980) | 3 | прототип для Шмель-1 |
разведывательный | (1983) |
| прототип для Пчела-1 Т | |
разведывательный |
| Модернизированный. С ТВ камерой («Пчела-1ТВ») или тепловизором («Пчела-1Т») | ||
Ту-243 «Рейс-Д» (ВР-3Д) | дозвуковой разведчик |
| Тактический беспилотный самолет-разведчик (с фото-, ТВ или фото -, ИК аппаратурой). Вес БЛА – 1,4 т. Дальность полета – 360 км.
| |
«Аист» | БЛА самолетного типа. | 2006 |
| (аналог израильского Searcher MkII). С оптико-электронной аппаратурой СОН-00 с ТВ/ИК-каналами, РЛС БО с синтезированной апертурой. Вес БЛА – 600 кг, ПН – 100 кг. Дальность действия – 250 км. Автономность – до 12 ч |
«Дань-БАРУК» | разведывательно-ударный комплекс | 2007 |
| Масса – 500 кг. Радиус действия – 150 км
|
«Эксперт» |
|
|
| Мини-ДПЛА. Вес – 40 кг
|
«Строй-Ф» («Малахит-Ф») | Фронтовой комплекс оперативно-тактической разведки, | 1993 |
| Экспортное название – «Филин» и «Малахит-Ф». Вес БЛА – ок. 3 т. |
ДПЛА-60С («Строй-П») | Дивизионный комплекс тактической разведки |
|
| СТВ аппаратурой, винтокольцевым движителем. Вес БЛА – 130-138 кг. Дальность полета –300 км, ресурс 10 применений. |
ДПЛА-61 «Шмель-1» | Разведывательный | 1991 |
| с ТВ и ИК оборудованием. |
разведывательный | 2007
|
| Полезная нагрузка – ТВ камера или цифровой фотоаппарат. Двигательная установка – электромотор, источник питания – аккумулятор. Линия связи – два цифровых защищенных канала – управления и передачи данных. Управление на маршруте – автономное. | |
Комбинированный (пилотированный или беспилотный) разведывательный комплекс | 2007 |
| может нести несколько типов оперативно заменяемой полезной нагрузки, в том числе телевизионную и тепловизионную оптико-электронные системы на гиростабилизированной платформе, автоматическую цифровую фотокамеру высокого разрешения и систему трехмерного лазерного картографирования (LIDAR). Масса БПЛА 860 кг, максимальная продолжительность полета в беспилотном режиме - 12 часов. Дальность ограничена возможностями радиоканала и составляет 200 км.
| |
сверхмалый разведчик |
| Вес: 2,3 кг.Полезная нагрузка: 2 цветные камеры фронтального и бокового обзора, тепловизор, фотоаппарат. Высота полёта: 15-3600 м над уровнем моря. Дальность передачи данных — 10 км. Максимальная продолжительность полёта: в комплектация с электродвигателем — до 90 минут на скорости от 65 до 130 километров в час.
| ||
Типчак (1К132) | малый разведчик |
| Система воздушной оптико-электронной разведки. Двухбалочной схемы, с катапультным стартом. Вес БЛА – не бол. 60 кг. В | |
разведывательный |
| Для получения и передачи на землю в реальном масштабе времени ТВ, тепло-визионного и фотографического изображения местности, определения координат наземных объектов, сбора, накопления и обработки видеоинформации. Полезная нагрузка – ТВ или тепловизионная камера, цифровой фотоаппарат. | ||
Дозор-2 | разведывательный и ударный |
|
| . В качестве полезной нагрузки массой до 8 кг на БПЛА стандартной комплектации используются автоматическая цифровая фотокамера с разрешением 12 Мpix, видеокамеры переднего и бокового обзора высокого разрешения (752х582 pix каждая), тепловизионная система ближнего и дальнего диапазонов, а также система распознавания объектов |
сверхмалый разведывательный |
|
| микро-БПЛА, выполненный по схеме бесхвостка, с тянущим воздушным винтом, вращаемым электродвигателем. Целевая аппаратура включает в себя микросхемы передачи информации, а так же неподвижную малогабаритную видеокамеру переднего или панорамного обзора. Вес 250 грамм | |
«Юлия-Э» («Строй-ПД») | Разведывательный (вариант БЛА СБ-06 «Аист» для комплекса «Строй-ПД»), экспортный. |
|
| С широкозахватной 2-спектральной (ТВ/ИК) аппаратурой «Радуга-Э» и/или РЛС БО с синтезированной апертурой РСА-М402К3, ГОЭС-630 с совмещенными ТВ/ИК-камерами и лазерным дальномером. Продолжительность полета – 12 ч, дальность действия –250 км. Вес БЛА – 550 кг, ПН – 100 кг
|
«Строй-Ф» («Малахит-Ф») | Фронтовой комплекс оперативно-тактической разведки, | 1993 |
| Экспортное название – «Филин» и «Малахит-Ф». Вес БЛА – ок. 3 т. |
ДПЛА-60С («Строй-П») | Дивизионный комплекс тактической разведки |
|
| с ТВ аппаратурой, винтокольцевым движителем. Вес БЛА – 130-138 кг. Дальность полета –300 км, ресурс – 10 применений |
многоцелевой, оперативный | >3 | дальность до 600 км, обеспечивает видео- и фотосъемку в сочетании с регистрацией текущих параметров (координаты, высота, номер кадра), взлетная масса — 14 кг, масса полезной нагрузки — до 5 кг |
Проект | Назначение | Первый | Начало | Примечание |
разведывательный вертолёт | — | БЛА способен вести инженерную, радиационную, химическую и биологическую разведку; доставлять экстренные грузы специального назначения; осуществлять трансляцию и ретрансляцию информации. Взлетная масса, 280 кг. Масса полезной нагрузки, 50-80 кг | ||
разведывательный вертолет | Полезная нагрузка БПЛА может включать установленные на гиростабилизированной платформе высококачественную видеокамеру, тепловизионную камеру или фотоаппарат. Передача данных на станцию управления осуществляется в режиме реального времени по защищенному цифровому C-OFDM-каналу. | |||
Ми-34БП (В-34БП) | Многоцелевой беспилотный вертолетный комплекс на базе легкого вертолета Ми-34, |
| В проекте | Предназначен для мониторинга земной поверхности и передачи на землю телевизионного и/или тепловизионного изображения местности или конкретных объектов на местности, химической и радиационной разведки, транспортировки грузов различного применения до 300 кг |
А-002М | Авиационный комплекс дистанционного зондирования |
| Начато серийное производство.
| Полезная нагрузка – ТВ камера, тепловизионная камера, радиолокационная станция и цифровой фотоаппарат. |
ДПВ-6-К | Мониторинговый комплекс на базе малогабаритных беспилотных летательных аппаратов вертолетного |
| Начато серийное производство | Взлетная масса 6 кг, масса полезной нагрузки 0,5 кг, дальность полета 10 км, высота полета 50-500 м, время полета 0,5 ч. Бортовое оборудование состоит из телевизионной системы с аппаратурой передачи телеметрической информации в структуре ТВ сигнала, приемника СНС, опционально – дуплексного радиоканала управления и передачи телеметрии на 20 км, автопилота, радиовысотомера и системы программного управления траекторией полета. |
Таблица 6. Сравнительные характеристики наиболее известных американских моделей БПЛА
Тип | Dark Star | Global Hawk | Predator | Outrider | Hunter | Pioneer |
Полезная нагрузка, кг | 450 | 1800 | 200 | 45 | 85 | 25 |
Радиус действия, км | 925 | 5,500 | 925 | 200 | 200 | 185 |
Время работы, час | <12 | <40 | <35 | 4.9 | 8-12 | 5 |
Время работы, час | <12 | <40 | <35 | 4.9 | 8-12 | 5 |
Скорость полета, км/час | 460 | 650 | 180 | 180 | 200 | 180 |
Потолок, км | 13500 | 19500 | 7500 | 3900 | 4500 | 4500 |
Управление полетом | Автономное с GPS**** | Автономное с GPS | Ручное (оператором с земли) или автономное | Программируемый автопилот с GPS |
|
|
Живучесть | высокая | Используются технологии Stealth | Используются технологии Stealth | Используются технологии Stealth | Используются технологии Stealth |
*ECM — средства электронного противодействия
***GCS — наземная станция управления
****GPS — спутниковая система навигации
Таблица 7. Сравнительные характеристики наиболее известных израильских моделей БПЛА
Войсковое обозначение (комплекс) | Назначение | Начало | Построено | Примечание |
HERMES 1500
| Воздушная разведка, противодействие комплексам ПВО | 1998 |
| Масса 1650 кг, максимальная скорость, км/ч 305, радиус действия, км 200, продолжительность полёта 40 ч, практический потолок 9145 м. Для проведения аэрофоторазведки, радиотехнической разведки, РЭБ, разведки с использованием радара с синтезированной апертурой и ретрансляции радиосигналов |
Skylark-I LE «Жаворонок» | Специализируется на наблюдении за территорией удаленной от точки запуска на расстояние до 15 километров. | 2000 |
| Максимальное время полета: 3 ч, рабочая высота: от - 220 м. до 920 м., относительно точки взлета, потолок высоты: более 5000 м, максимальный взлетный вес: 6,5 кг. |
Aerostar . | разведывательный БЛА | 2000 |
| Применяется израильскими вооруженными силами для контроля обстановки в секторе Газа, а также полицией для контроля обстановки на дорогах и в операциях по задержанию нарушителей. В автомобилях полиции смонтированы мониторы, передающие изображение с БЛА Aerostar в режиме реального времени. |
Searcher MkII «Искатель» | БПЛА предназначен для ведения разведки на тактическую глубину, а также для выдачи целеуказаний на различные комплексы ударного оружия | 1988 | >100 | Масса 426 кг, максимальная скорость 200 км/ч, дальность действия 250 км., практический потолок 6100 м., продолжительность полета 15-18ч оборудован комплексом MOSP TV/FLIR (ТВ и ИК камерами). Поставляется в РФ. |
«Пантера» | БПЛА предназначен для ведения разведки на тактическую глубину, а также для выдачи целеуказаний на различные комплексы ударного оружия | 2010 |
| Радиус действия — 60 км, продолжительность полета — 6 часов, потолок — 3000 м, максимальный взлетный вес − 65 кг, максимальный вес полезной нагрузки — 20 кг. В состав полезной нагрузки в штатном варианте входит система Mini POP производства ТАА, позволяющая вести наблюдение круглосуточно в любых погодных условиях. По желанию заказчика, на БПЛА можно установить камеру с системой ночного видения, лазерный целеуказатель, измеритель расстояния или систему наведения. |
1.1.3 Характерные свойства беспилотных самолетов-разведчиков
1.1.3.1 Тактический беспилотный самолет-разведчик одноразового применения Ла-17Р (ТБР-1, изд.204)
Создан на базе беспилотной мишени Ла-17М (изд.203). Фюзеляж самолета состоит из трех отсеков. Спецоборудование: фотоаппарат (АФА-40, АФА-20, БАФ-21 или АЩФА-5М), либо телекамера "Чибис". В хвостовом отсеке располагаются агрегаты электро- и радиооборудования и автопилот АП-118 (позднее АП-122), регулирующий подачу воздуха из баллонов к пневмо - приводам рулей и элеронов. Стартовая масса - 3100 кг. Высота полета - от 100 до 7000м, скорость - от 750 до 900 км/ч, максимальная дальность - около 260 км. Управление самолетом в полете осуществляет автопилот по заранее введенной в него программе и по радиокомандам с наземной станции.
1.1.3.2 Комплекс дальней беспилотной разведки Ту-123 (ДБР-1) "Ястреб"
Основу комплекса составляет самолет с высокой сверхзвуковой скоростью и дальностью полета около 4000 км, оснащенный фото- и радиотехническим разведоборудованием. Фотоаппаратура позволяет опознавать шпалы железнодорожного полотна на снимках, сделанных с высоты 20 км при скорости полета 2700 км/ч. Ту-123 - цельнометаллический среднеплан с треугольными в плане крылом и оперением. Фюзеляж круглого поперечного сечения состоял из носовой и хвостовой частей, соединенных между собой четырьмя пневмозамками. В носовой части (НЧ) находится спецоборудование (три длиннофокусных аэрофотоаппарата АФА-54 и один панорамный, станция радиотехнической разведки СРС-6), система кондиционирования, часть агрегатов воздушной системы, электро и радиооборудования.
Длина Ту-123 - 26,95 м, размах крыла - 7,94 м, стреловидность крыла по передней кромке - 67 градусов. Стартовая масса - около 35000 кг, масса топлива - 16600 кг. Скорость полета - 2,5М, высота - от 1800 до 20000 м, дальность - 3800 км. После старта разведчик летит в автоматическом режиме. На завершающем этапе полета самолет управляется, как правило, в ручном режиме, с помощью бортовых и наземных радиотехнических средств.
1.1.3.3 Комплексы беспилотной тактической разведки Ту-143 (ВР-3) "Рейс" и Ту-141 (ВР-2) "Стриж" оперативного назначения
Ту-143 "Рейс" выполнен по аэродинамической схеме "утка" с неподвижным дестабилизатором. Носовой модуль фюзеляжа может отстыковываться и храниться отдельно. В зависимости от типа решаемых разведзадач в этом модуле размещаются: аэрофотоаппарат ПА-1 (позволяет с высоты 500 м выполнять снимки, на которых идентифицируются предметы размером от 20 см), либо телекамера "Чибис-Б", либо аппаратура радиационной разведки "Сигма". В средней части фюзеляжа установлены блоки автоматической системы управления АБСУ-143, доплеровский измеритель скорости и сноса ДИСС-7, радиовысотомер малых высот А-032, агрегаты электрооборудования и носовая опора шасси. Элевоны крыла и руль направления управляются гидравлическими рулевыми машинками.
Длина Ту-143 - 8,06 м, размах крыла - 2,24 м, площадь -2,9 кв. м, стреловидность крыла по передней кромке - 58 градусов. Стартовая масса -1230 кг, посадочная - 1012 кг. Скорость полета - до 925 км/ч, дальность - 180 км, минимальная высота полета - 100 м. Количество разворотов (до 270 градусов) в полете - 2. Полет и посадка ВР-3 происходят по заранее введенной в АБСУ программе.
Усовершенствованный вариант разведчика - Ту-243 "Рейс-Д оснащен более совершенным спецоборудованием (фото + телеаппаратура, либо фото + ИК - аппаратура разведки). Благодаря этому эффективность комплекса повышена более чем в 2,5 раза. Длина Ту-243 - 8,32 м, размах крыла - 2,25 м. Стартовая масса - 1400 кг. Скорость полета - до 940 км/ч, дальность - 360 км, минимальная высота полета - 50 м. Максимальная площадь разведки за один вылет - 2100 кв.км.
1.1.3.4 Многоразовый комплекс беспилотной воздушной разведки оперативного назначения ВР-2 (Ту-141) "Стриж"
По аэродинамической схеме подобен "Рейсу", но имеет большие габариты, стартовую массу, запас топлива, дальность и продолжительность полета. Основной метод ведения разведки - аэрофотосъемка. Длина Ту-141 - около 14 м, размах крыла - около 4 м. Стартовая масса - около 7000 кг. Скорость полета - 950-1100 км/ч, дальность - 1000 км, минимальная высота полета - 50 м.
1.1.3.5 Комплекс дивизионной воздушной разведки Строй П с ДПЛА Пчела
Родоначальником отечественных комплексов тактических ДПЛА справедливо считается комплекс «Строй-П» с ДПЛА «Пчела-1». Структура комплекса и проектные решения по системе управления позволяют использовать в модели отечественных комплексов тактических ДПЛА.
Комплекс «Строй-П» предназначен для наблюдения поля боя на удалениях до 50 км от места старта ДПЛА «Пчела-1». Комплекс «Строй-П» содержит в своём составе:
· наземный пункт дистанционного управления (НПДУ), совмещённый с пусковой установкой,
· ДПЛА (один из них – в съёмном контейнере на НПДУ),
· эвакуационно-технологическую машину (МЭТ),
· технологическую машину (ТМ).
Дистанционно пилотируемый летательный аппарат “Пчела-1” конструктивно выполнен по нормальной аэродинамической схеме с толкающим винтом. Он имеет складывающееся крыло регулируемой стреловидности (для возможного изменения центровки ДПЛА). ДПЛА «Пчела-1» может нести в качестве целевой нагрузки телевизионную (ТВ) кадровую камеру с переменным фокусным расстоянием или инфракрасную (ИК) строчную аппаратуру разведки диапазона 8..14 мкм. В обоих случаях в состав целевой нагрузки ДПЛА входит также широкополосный передатчик с антенной для передачи ТВ или ИК изображения.
ТВ или ИК изображение местности с борта ДПЛА поступает на НПДУ по широкополосной радиолинии. Изображение представляется операторам на двух экранах. Операторы, наблюдая представленное изображение, производят обнаружение и распознавание целей. Итогом работы операторов с целью является измерение её координат.
Особенностью комплекса «Строй-П» является полная автономность его навигационной системы. Для навигации ДПЛА «Пчела-1» используется специально разработанный радиолокатор с активным ответом на основе псевдослучайных широкополосных сигналов. Навигационные параметры – дальность и азимут ДПЛА. Угол места ДПЛА не измеряется, вместо этого используют данные о текущей высоте, измеряемой на борту ДПЛА. Запросная и ответная радиолинии радиолокатора одновременно являются командным и телеметрическим каналами управления ДПЛА. Антенны радиолокатора и широкополосной радиолинии для приёма ТВ (ИК) информации конструктивно объединены.
Таблица 8. Основные ТТХ комплекса «Строй-П»
Характеристика | Значение |
Назначение комплекса | Телевизионное или инфракрасное наблюдение местности и целей на ней в реальном масштабе времени |
Целевая нагрузка (одна из указанных) | 1) Гиростабилизированная кадровая телевизионная камера с 10-кратным вариофокальным объективом, управляемая в пределах ±175 градусов по курсу (азимуту) и +5.. –65 градусов по тангажу (углу места) 2) Строчный инфракрасный сканер диапазона 8..14 мкм с углом захвата 120 градусов В целевую нагрузку входит широкополосный передатчик с антенной |
Порядок погрешности измерения координат цели (СКО), м | Сотни метров (основной источник погрешности – измерение азимута ДПЛА с НПДУ, СКО 0,5 градуса) |
Дальность (радиус) действия комплекса, км | 50,0 (при прямой радиовидимости) |
Продолжительность полёта ДПЛА, час | 2,0 |
Диапазон высот применения ДПЛА, м | 100..2500 |
Воздушная скорость полёта ДПЛА, км/час | 140 |
Стартовая масса ДПЛА, кг, не более | 140 |
Реализация системы поддержания заданного курса в комплексом заслуживает отдельного рассмотрения. В качестве компаса применены два магнитных зонда на пермаллое. Зонды размещены на гиростабилизированной горизонтальной площадке внутри курсогировертикали. Один из зондов ориентирован вдоль продольной оси ДПЛА, второй - перпендикулярно к первому в горизонтальной плоскости. Проекция магнитного поля на первый зонд пропорциональна косинусу, а на второй - синусу магнитного курса ДПЛА. Оператор задаёт курс лимбом на пульте. Датчик поворота лимба тоже синусно-косинусный. Синус и косинус заданного курса передаются на борт ДПЛА, где в бортовом вычислителе вырабатывается управление ДПЛА по курсу Ф:
u =sin(Физм)cos(Фзад) – cos(Физм)sin(Фзад).
Очевидно, что это управление при малых отклонениях курса ДПЛА от заданного равно
u=sin(Физм-Фзад) ~Физм-Фзад.
Бортовой вычислитель отклоняет руль направления ДПЛА пропорционально вычисленному управлению u. Алгоритм замечателен тем, что правильно работает при любых отклонениях курса ДПЛА от заданного, кроме теоретически возможного, но неустойчивого состояния, когда ДПЛА летит строго противоположно заданному курсу (теоретически в этом случае вырабатывается нулевое управление). Это свойство алгоритма позволило не реализовывать в бортовом вычислителе логические процедуры анализа курса по четвертям тригонометрического круга.
Работа боевого расчёта комплекса при управлении ДПЛА. Первые 15 секунд полёта - газ максимальный, руль высоты - неподвижно в стартовом положении, управление осуществляется только по поддержанию нулевого крена ДПЛА. По истечении этого времени ДПЛА принимает текущий курс в качестве заданного и продолжает набор высоты до заданной (обычно 400 метров). На это уходит 2..3 минуты. Оператор после нажатия кнопки "Пуск" никаких действий по управлению ДПЛА не производит.
После набора заданной высоты штурман (второй член боевого расчёта) лимбом на пульте устанавливает заданный курс ДПЛА на цель, которая может быть удалена на расстояние до 50 км. Заданный курс поступает по командному каналу управления в бортовой вычислитель ДПЛА и отрабатывается, как описано выше. Штурман, наблюдая показания индикаторов дальности и азимута, отмечает на карте путь ДПЛА. Через некоторое время (около 5 минут) штурман вычисляет и вносит в заданный курс поправку на ветер и погрешности измерения курса. Как правило, после этого боевой расчёт освобождается от необходимости выполнять какие-либо действия по управлению ДПЛА до приближения ДПЛА к цели. На расчётное время полёта к цели можно выключить радиоканалы, хотя на практике этого никогда не делали.
Работа начинается для боевого расчёта при приближении ДПЛА к цели. Штурман оценивает накопившуюся погрешность вывода ДПЛА на заданную цель и вносит поправку в заданный курс. Оператор включает ТВ передатчик на борту ДПЛА и начинает наблюдение местности и поиск цели. Штурман помогает оператору, подсказывая ожидаемые ориентиры, и участвует в обнаружении и распознавании цели (известный "эффект коллективного распознавания"). После обнаружения и распознавания цели оператор наблюдает её элементы, штурман рассчитывает заданный курс повторного захода и при удалении ДПЛА от цели на необходимое для разворота расстояние устанавливает его.
На фоне современных информационных и других технологий комплекс «Строй-П» успел морально устареть, а образцы НПДУ и ДПЛА устарели и физически. Однако для формирования задач системного анализа его ТТД допустимо использовать для построения модели комплексов малых тактических ДПЛА.
Так находящийся в стадии доработок многоцелевой комплекс воздушной разведки "Типчак"Top of Form![]() с БЛА-05 (прежнее название 9М62) предназначен для обнаружения с воздуха различных объектов, их опознавания, определения и передачи координат их местоположения в масштабе реального времени потребителям в любое время суток на дальности до 40 км от наземного пункта управления. При разработке комплекса учтены и развиты наиболее характерные проектные решения, принятые в комплексе «Строй-П»Bottom of Form
с БЛА-05 (прежнее название 9М62) предназначен для обнаружения с воздуха различных объектов, их опознавания, определения и передачи координат их местоположения в масштабе реального времени потребителям в любое время суток на дальности до 40 км от наземного пункта управления. При разработке комплекса учтены и развиты наиболее характерные проектные решения, принятые в комплексе «Строй-П»Bottom of Form
Комплекс обеспечивает высокую точность следования БЛА по маршруту и возможность установки на нем различной полезной нагрузки, использования аппарата автономно (по программе) и в режиме непосредственного радиоуправления.
Разведка наземных объектов может осуществляться одновременно двумя летательными аппаратами.
1.1.4 Основные результаты анализа проведенного обзора
Анализ проведен с учетом особенностей математической модели управления полетом ЛА в режиме аэрофотосъемки. В этом режиме необходимо обеспечить горизонтальный полет со значительной степенью стабилизации по курсу, крену и тангажу. Требования обусловлены необходимостью компенсации смаза, возможной дефокусировки, стабильностью определения координат и привязки абсолютной и воздушной систем координат к разведданным. Для учета фактора влияния турбулентностей атмосферы необходимо в свою очередь учесть массогабаритные характеристики ЛА – носителя аппаратуры воздушной разведки. По этим характеристикам будем в дальнейшем различать:
· Тяжелые БПЛА массой более 1000 кг.
· Средние БПЛА массой от 100 кг до 1000 кг.
· Мини – БПЛА массой от 10кг. До 100 кг.
· Микро – БПЛА массой в сотни грамм.
· При выборе модели атмосферы и ее параметров необходимо различать:
· Высотные БПЛА с потолком до нескольких километров.
· Средневысотные и маловысотные БПЛА с потолком до километра
2. Модель полета ЛА в режиме аэрофотосъемки
2.1 Пилотируемые ЛА, тяжелые и средние БПЛА
Проведенный анализ позволяет построить модель схемы управления полетом пилотируемых ЛА а также тяжелых и средних БПЛА в режиме аэрофотосъемки (Рисунок 1).
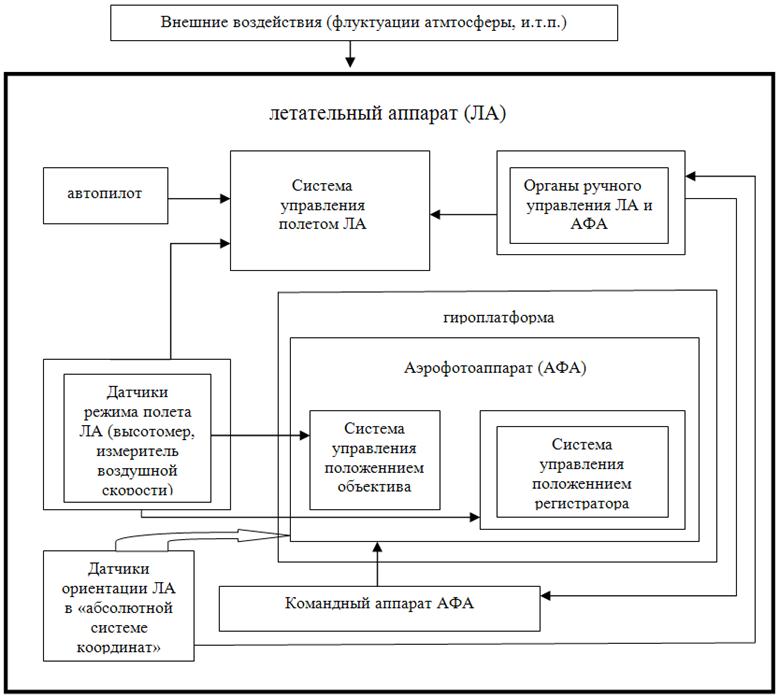
Рисунок 1. Схема управления полетом ЛА в режиме аэрофотосъемки со стабилизацией АФА
Структурная схема, приведенная на рисунке 1 учитывает, что рассмотренные ЛА позволяют применять гироплатформы для стабилизации пространственного положенния оптической оси объектива АФА и фиьтрации вибраций, которые могут привести к дефокусировке регистрируемого изображения. Учтено также, что навигационные системы ориентации ЛА обладают точностью, позволяющую определять воздушную скорость и высоту полета, что позволяет применять подсистемы компесации смаза изображения в конструкции АФА путем управления положением объектива и приводом регистратора.
2.2 Мини- и микро- БПЛА
Проведенный анализ позволяет построить модель схемы управления полетом также мини- и микро- БПЛА в режиме аэрофотосъемки (Рисунок 2).
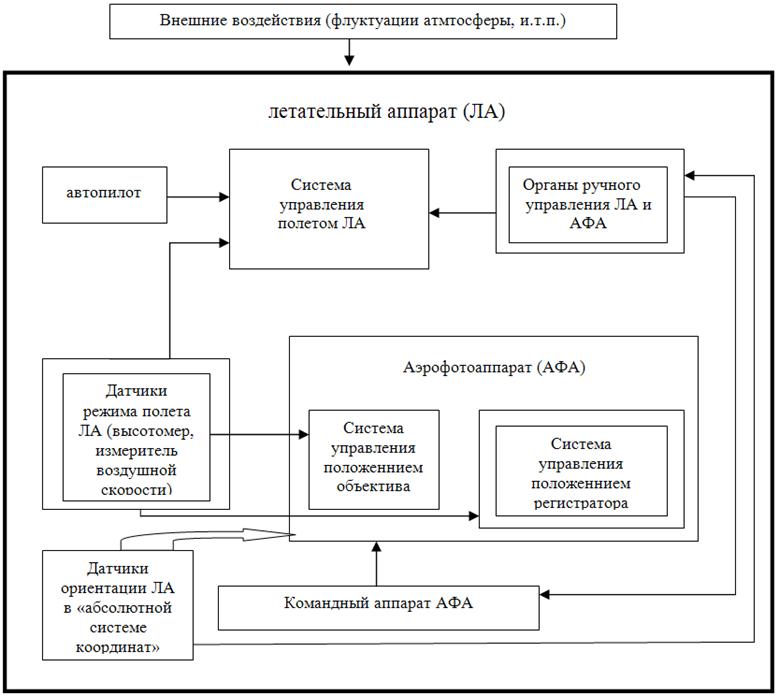
Рисунок 2. Схема управления полетом ЛА в режиме аэрофотосъемки без общей стабилизации АФА
При построении схемы учтены следующие особенности данных типов ЛА:
· В отличие от вышерассмотренных режим полета этих ЛА в значительной степени зависят от атмосферных флуктуаций.
· Применение гироплатформ и автономных систем стабилизации АФА в целом весьма ограничено.
· Стабилизация пространственного положения оптической оси объектива АФА в основном осуществляется введением дополнительных оптических компонент в схему объектива и снабжением регистратора подсистемой стабилизации положения. Подробнее этот вопрос рассматривается во второй статье цикла.
2.3 Линеаризованная модель ЛА.
Летательный аппарат как объект управления может быть описан математическими моделями различной сложности. Для исследования процесса аэрофотосъемки, когда отклонения от требуемой траектории малы, целесообразно использовать линеаризованную модель пространственного движения вида
![]() . (1)
. (1)
В режиме аэрофотосъемки опорным движением ЛА является прямолинейный горизонтальный полет с постоянной скоростью. Такой режим позволяет его моделирование в линейном приближении. В результате линеаризации полной нелинейной модели пространственного движения летательного аппарата с известными допущениями [17, 18], включающей уравнения движения центра масс, уравнения углового движения вокруг центра масс и кинематические уравнения, получим следующую систему уравнений:
|
|
|
|
|
|
|
|
|
|
| (2) |
|
|
|
|
|
|
где ![]()
![]()
![]() – приращение составляющих вектора путевой скорости вертолета в связанной системе координат;,
– приращение составляющих вектора путевой скорости вертолета в связанной системе координат;, ![]() ,
, ![]() ,
, ![]() – приращения угловых скоростей;
– приращения угловых скоростей; ![]() – приращение угла крена;
– приращение угла крена; ![]() – приращение угла тангажа относительно балансировочного значения
– приращение угла тангажа относительно балансировочного значения ![]() .
.
Дополним данную математическую модель уравнениями приводов органов управления самолета, принятых в виде апериодических звеньев:
| (3) |
|
|
Тогда вектор состояния линеаризованной модели примет вид:
| (4) |
где
| (5) |
|
|
В качестве сигналов управления принимаем управляющие сигналы от системы автоматического управления в каналах элеронов, руля направления, стабилизатора и двигателя. Тогда вектор управления линеаризованной модели для решаемой задачи имеет вид:
|
|
где ![]() - приращения сигналов управления в каналах элеронов, рулей направления, стабилизатора и двигателя соответственно.
- приращения сигналов управления в каналах элеронов, рулей направления, стабилизатора и двигателя соответственно.
2.4 Учет турбулентности атмосферы
При исследовании динамики полета самолета в турбулентной атмосфере применим метод непрерывных случайных процессов для описания неспокойной атмосферы. Вектор приращения скорости ветра ![]() рассматривается как векторный случайный процесс, а спектральные плотности продольной
рассматривается как векторный случайный процесс, а спектральные плотности продольной ![]() и нормальной
и нормальной ![]() составляющей в скоростной системе координат описываются одномерной спектральной моделью Драйдена [19]:
составляющей в скоростной системе координат описываются одномерной спектральной моделью Драйдена [19]:
|
|
 ,
, 
 ,
, 
Здесь ![]() ,
, ![]() – спектральные плотности продольной и нормальной компонент вектора
– спектральные плотности продольной и нормальной компонент вектора ![]() соответственно;
соответственно; ![]() ,
, ![]() – масштабы турбулентности в соответствующих направлениях,
– масштабы турбулентности в соответствующих направлениях, ![]() – угловая частота колебаний центра масс самолета;
– угловая частота колебаний центра масс самолета; ![]() ,
, ![]() – собственные частоты турбулентных порывов;
– собственные частоты турбулентных порывов; ![]() – воздушная скорость.
– воздушная скорость.
Случайный процесс с такими спектральными плотностями представляется моделью «белого шума» с интенсивностями
|
|
который пропускается через формирующие фильтры с передаточными функциями соответственно
| (6) |
Здесь ![]() ,
,![]() – дисперсии скорости ветра в соответствующих направлениях.
– дисперсии скорости ветра в соответствующих направлениях.
Данные формирующие фильтры включаются в расширенную модель динамики самолета. Формирующим фильтрам (6) для продольной и нормальной составляющей ветра соответствуют следующие дифференциальные уравнения в приращениях:
| (7) |
Здесь ![]() – вспомогательная переменная;
– вспомогательная переменная; ![]() ,
, ![]() – «белые» шумы с интенсивностями
– «белые» шумы с интенсивностями ![]() и
и ![]() соответственно.
соответственно.
Для учета влияния ветра необходимо в уравнениях модели (2) указать влияние ветра на воздушную скорость, угол атаки и угол скольжения, так как эти параметры служат аргументами сил и моментов. Вектор воздушной скорости ![]() получается из вектора путевой скорости
получается из вектора путевой скорости ![]() путем вычитания скорости ветра
путем вычитания скорости ветра ![]() :
: ![]() . Отсюда определяются вызванные ветром изменения воздушной скорости
. Отсюда определяются вызванные ветром изменения воздушной скорости ![]() , изменения угла атаки
, изменения угла атаки ![]() и изменения угла скольжения
и изменения угла скольжения ![]() . Для относительно малых скоростей ветра приращения указанных выше параметров можно считать равными
. Для относительно малых скоростей ветра приращения указанных выше параметров можно считать равными
|
|
Ветровые возмущения учитываются в линеаризованных уравнениях динамики самолета в соответствии с представленной ниже методикой. При этом в уравнениях фигурируют производные углов атаки и скольжения от ветра. Для их формирования в расширенную модель вводятся дополнительные дифференциальные уравнения:
| (8) |
с уравнениями связи
| (9) |
Здесь ![]() ,
, ![]() – вспомогательные переменные;
– вспомогательные переменные; ![]() – производная приращения нормальной составляющей скорости ветра;
– производная приращения нормальной составляющей скорости ветра; ![]() ,
, ![]() – производные приращений углов атаки и скольжения от ветра.
– производные приращений углов атаки и скольжения от ветра.
Путем объединения уравнений динамики самолета (2) и формирующих фильтров для возмущений (7) и (8), строится расширенная модель объекта управления
| (10) |
где вектор возмущений ![]() имеет вид
имеет вид
|
|
а в уравнения динамики самолета (2) с учетом соотношений (9) добавляются следующие слагаемые, обусловленные действием ветра:
| (11) |
Решения уравнения (2) с учетом (9) и (11) в каждом конкретном случае находятся с учетом приведенной классификации ЛА по массогабаритным характеристик. Для моделирования режимов аэрофотосъемки в условиях максимального приближения реального полета ЛА они обладают наперед известной областью адекватности. Таким образом открывается возможность определения вектора воздушной скорости ЛА, что в свою очередь позволяет определять остаточный вектор смаза изображения и учитывать его при решении обратной задачи восстановления смазанного изображения при наземной обработке аэрофильмов. Девиация значений углов тангажа, курса и рысканья также может быть определена и это позволяет строить модель дефокусированного изображения. Следовательно, можно считать, что создаются условия для прогнозирования качества разведданных и восстановления смазанных и дефокусированных аэрофильмов. Эти вопросы рассматриваются во второй статье предложенного цикла.
1. "Военная Авиация", Media 2000 Авиационная интернет-энциклопедия
2. Гордиенко Ю.В., Морозов В.П., Прибылов А.С. Военная авиация, том 2. Издательство "Попурри" 1999 год.
3. Авиация: Энциклопедия / Гл. ред. Г. П. Свищёв — М.: Большая Российская энциклопедия, 1994. — С. 108. — 736 с. — ISBN 5-85270-086-X.
4. ВР-3 «Рейс», комплекс воздушной разведки с беспилотным летательным аппаратом Ту-143, [www.arms-expo.ru]
6. zala.aero
7. www.ptero.ru
10. www.gatewing.com
11. cropcam.com
12. c-astral.com
14. www.geocopter.nl
15. Салычев О.С. Автопилот БПЛА с инерциальной интегрированной системой — основа безопасной эксплуатации беспилотных комплексов. Портал «Беспилотная авиация».
16. Материалы сайта www.airwar.ru
17. Бочаров А.С., Сельвесюк Н.И. Методика синтеза законов управления для контура автоматической системы заправки самолета в воздухе с учетом ветровых возмущений // Приборы и системы. Управление, контроль, диагностика. 2007. № 7, с. 21–27
18. Буков В.Н. Адаптивные прогнозирующие системы управления полетом. – М.: Наука. Гл. ред. физ.-мат. лит., 1987.
19. Красовский А.А. Системы автоматического управления полетом и их аналитическое конструирование. – М.: Наука, 1973
Публикации с ключевыми словами: комплекс, автопилот, самолет, воздушная разведка, динамика полета, вертолет
Публикации со словами: комплекс, автопилот, самолет, воздушная разведка, динамика полета, вертолет
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||