научное издание МГТУ им. Н.Э. Баумана
НАУКА и ОБРАЗОВАНИЕ
Издатель ФГБОУ ВПО "МГТУ им. Н.Э. Баумана". Эл № ФС 77 - 48211. ISSN 1994-0408
# 09, сентябрь 2011
УДК 681.5:629.733.5
Технологический институт Южного федерального университета, г. Таганрог
Современный уровень развития воздухоплавания заново открывает перспективы применения дирижаблей для решения задач транспортировки, мониторинга и наблюдения [1, 2]. При решении любой задачи система управления дирижаблем должна обеспечивать возможность безопасного взлета и посадки. Режимы взлета и посадки являются наиболее аварийными и сложными при управлении дирижаблем в силу ограниченности органов управления в этих режимах, существенного изменения аэродинамических характеристик дирижабля при движении вблизи поверхности, сильным влиянием ветровых возмущений. В этой связи актуальной является задача автоматического взлета и посадки дирижабля как роботизированного средства.
Постановка задачи
Выделим следующие режимы полета роботизированного дирижабля: отчаливание и взлет, движение вдоль заданной траектории, зависание в заданной области, посадка и причаливание. Посадка современных дирижаблей осуществляется, как правило, к причальной мачте. Используют как стационарные, так и подвижные мачты.
Сформулируем задачи управления дирижаблем в режимах взлета и посадки. Задача управления дирижаблем в режиме взлета состоит в организации его движения из точки взлета вдоль заданной траектории с заданной скоростью, с подавлением внешних и параметрических возмущающих воздействий. Задача управления дирижаблем в режиме посадки состоит в организации его движения в заданную точку посадки с нулевой целевой скоростью, с подавлением внешних и параметрических возмущающих воздействий.
Отметим что при решении задач взлета и посадки, как правило, возможно использование только движителей в качестве управляющих элементов. Аэродинамические рули в данном случае неэффективны из-за низких скоростей полета и могут использоваться только для пассивной компенсации порывов ветра.
Основной проблемой при посадке дирижабля являются ветровые воздействия. Для компенсации сноса должна использоваться техника упреждения по курсу – поворот носа дирижабля против ветра.
Математическая модель дирижабля
При формировании математической модели дирижабля за основу взята математическая модель твердого тела, движущегося в пространстве. Система уравнений, описывающая кинематику и динамику дирижабля, а также динамику приводов, представлена в следующем матричном виде:
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
где х – вектор внутренних координат (координат состояния); М – матрица массо-инерционных параметров, элементами которой являются масса, моменты инерции, присоединенные массы дирижабля; Fu(x, Y, δ, l) – вектор управляющих сил и моментов, здесь l – вектор конструктивных параметров; Fd(x, Y, l) – вектор нелинейных элементов динамики дирижабля; Fv – вектор измеряемых и неизмеряемых внешних возмущений; δ – вектор управляемых координат (углы поворотов движителей, положения рычагов управления тягой двигателя и т.п.); K – матрица коэффициентов управления; U – вектор управляющих воздействий; Y = (P, Θ)T –вектор положения P и ориентации Θ (выходных координат) связанной системы координат относительно базовой; Σ(Θ, x) – вектор кинематических связей; ΣP(Θ, x) и ΣΘ(Θ, x) – вектора соответственно линейных и угловых скоростей связанной системы координат относительно базовой.
Отметим, что модели динамики дирижабля вида (1), (2) и (3) представляют собой многосвязные системы нелинейных дифференциальных уравнений.
Классическая пилонная схема расположения органов управления дирижабля имеет следующие каналы управления:
- тяги левого и правого движителей;
- углы поворота левого и правого движителя в вертикальной плоскости.
Отметим, что пилонная схема не позволяет непосредственно компенсировать боковые возмущения (например, боковые порывы ветра). Так как отсутствует управляющая боковая сила, требуется применение соответствующих алгоритмов для изменения ориентации дирижабля в соответствии с целью движения и возмущающими воздействиями.
Закон управления дирижаблем в режимах взлета и посадки
Предлагаемый закон управления основан на методе аналитического синтеза нелинейных позиционно-траекторных систем управления подвижными объектами [4]. Данный метод применен к задачам взлета и посадки посредством формирования соответствующих траекторных многообразий, а также его модификации. Модификация данного метода, предложенная автором, состоит в способе формирования требований к углам ориентации дирижабля и матрицы массо-инерционных параметров, который позволяет реализовать технику упреждения по курсу и повысить точность отработки задач взлета и посадки в условиях ветровых воздействий.
Постановка задачи взлета составляет содержание задачи траекторного управления. Тогда траекторное многообразие будем формировать в виде:
![]() ,
,  ,
,
где N(P, t) – требования к траектории в виде квадратичных форм внешних координат, Φ(P, Θ ,t) – вектор, задающий требования к углам ориентации дирижабля, Aij – коэффициенты, определяющие вид траектории.
Вектор Φ, составляющий требования к углам ориентации дирижабля, предлагается задавать следующим образом:
![]() ,
,
где Φψ, Φθ и Φγ – компоненты вектора Φ, задающие требования к углам курса, тангажа и крена соответственно.
Отметим, что в силу специфики движения дирижабля, задание желаемой траектории (многообразие N) уже накладывает требования и на его углы ориентации (в особенности на курс), т.к. дирижабль, как правило, движется в продольном направлении. Таким образом, дополнительные требования к углам ориентации должны быть либо согласованы с требованиями к траектории, либо исключены.
В условиях изложенных выше особенностей представляется целесообразным не задавать дополнительное требование к курсу, т.е. Φψ=0. Требования к тангажу и крену могут также не предъявляться, либо, если дирижабль обладает достаточными исполнительными механизмами, задаваться в виде:
![]()
где θ, γ – текущие углы тангажа и крена, θ *, γ* – желаемые углы тангажа и крена. Как правило, θ * и γ* должны быть заданы нулевыми.
Таким образом, траекторное многообразие Ψtr представлено в виде:
 (4)
(4)
Для связи ориентации дирижабля с требованием к траектории, т.е. поступательного и вращательного движений, предложено задавать желаемое движение некоторой точки дирижабля, смещенной относительно центра масс на расстояние xu в продольном направлении. Для этой точки возможно управление в поперечном направлении за счет поворота дирижабля по курсу. При этом матрица массо-инерционных параметров из (1) будет иметь вид:
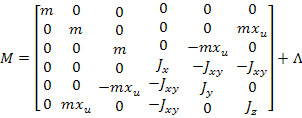 ,
,
где m – масса дирижабля, Jx, Jy, Jz, Jxy – моменты инерции, ![]() – матрица присоединенных масс.
– матрица присоединенных масс.
Скоростное многообразие имеет вид:
![]()
![]()
где V, V* – скорость дирижабля и ее желаемое значение,  ,
,  .
.
Требования к установившемуся режиму движения дирижабля при взлете в пространстве R6x6 базовых координат Y и скоростей ![]() , может быть представлено в виде вектор–функции Ψ базовых координат и углов ориентации, а также их производных, вида:
, может быть представлено в виде вектор–функции Ψ базовых координат и углов ориентации, а также их производных, вида:
![]() ,
,
где ![]() – блочная диагональная матрица коэффициентов, определяющих характер движения дирижабля относительно траекторного многообразия Ψtr и характер переходных процессов по углам ориентации дирижабля.
– блочная диагональная матрица коэффициентов, определяющих характер движения дирижабля относительно траекторного многообразия Ψtr и характер переходных процессов по углам ориентации дирижабля.
Применяя процедуру синтеза закона позиционно-траекторного управления с учетом (4), получим следующий закон управления автопилота взлета:
![]() , (5)
, (5)
где K, G1, G2 – функциональные матрицы соответствующей размерности, получаемые из условия устойчивости решений уравнения, задающего желаемый характер движения замкнутой системы, ![]() – (6x6)-матрица задаваемых коэффициентов настройки.
– (6x6)-матрица задаваемых коэффициентов настройки.
Автопилот посадки. Постановка задачи посадки подпадает под определение позиционно-траекторной. Требования к траектории N будут иметь вид:
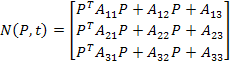 ,
,
где Aij – коэффициенты, определяющие вид траектории.
Первые 2 элемента вектора Ψtr будут задавать желаемую траекторию движения, а 3-й элемент – одну из координат точки позиционирования.
Скоростное многообразие будет иметь вид ![]() . Задание вектора Φ, составляющего требования к углам ориентации дирижабля и матрицы массо-инерционных параметров, а также выражение закона управления аналогичны автопилоту взлета (в данном случае
. Задание вектора Φ, составляющего требования к углам ориентации дирижабля и матрицы массо-инерционных параметров, а также выражение закона управления аналогичны автопилоту взлета (в данном случае ![]() в алгоритме управления (5) – нулевой вектор).
в алгоритме управления (5) – нулевой вектор).
Предложенный способ формирования требований к траектории дирижабля в режимах взлета и посадки обеспечивает компенсацию бокового ветра и позволяет увеличить точность выполнения задач взлета и посадки.
Оценка внешних сил и моментов. Даже с применением датчика ветра прямое измерение сил и моментов, действующих на дирижабль, затруднено, поэтому основным инструментом в данной ситуации становятся алгоритмы оценивания. Для оценивания неизмеряемых внешних возмущений предложено использовать процедуру построения редуцированных наблюдателей Луенбергера вида:
![]() (6)
(6)
![]()
где L – диагональная матрица с постоянными положительными коэффициентами, обеспечивающая асимптотическую устойчивость процесса оценивания, F – аналитическая оценка внешних сил, ![]() – оценка неизмеряемых внешних сил,
– оценка неизмеряемых внешних сил, ![]() – вспомогательная переменная.
– вспомогательная переменная.
Полученные оценки неизмеряемых внешних сил ![]() используются для формирования вектора
используются для формирования вектора ![]() в (5).
в (5).
Использование наблюдателя в структуре автопилота взлета и посадки позволяет увеличить точность выполнения этих задач в условиях ветровых возмущений.
Результаты моделирования
На рисунках 1-5 представлены результаты моделирования автопилота посадки роботизированного дирижабля. Моделировалось движение дирижабля, описываемого математической моделью (1), замкнутого автопилотом (5) с применением наблюдателя (6). Дирижабль начинает движение из точки (30, 25, 35) м с начальной скоростью Vx = 3 м/с. Задана точка посадки (цель позиционного управления) в начале координат.
На рисунках 1, 2, показаны траектория и скорость дирижабля при движении без внешних возмущений с применением описанного закона управления с техникой упреждения по курсу. На рисунках 3а и 3б показана ориентация дирижабля на траектории (вид сверху) при задании курса по направлению к точке посадки (а) и по описанному выше методу (б). На рисунках 4 и 5 приведены аналогичные сравнения в условиях ветровых воздействий (при воздействии ветра параллельно осе x и z базовой системы координат соответственно).
Символическое изображение дирижабля построено через равные промежутки времени, т.е. чем чаще эти изображения, тем меньше скорость на данном участке траектории.
На основе данных результатов моделирования можно сделать вывод о повышении точности выполнения задачи посадки с применением предложенного закона управления автопилота.

Рис. 1. Траектория дирижабля при движении без внешних возмущений
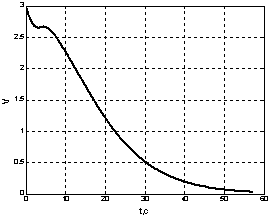
Рис. 2. Скорость дирижабля
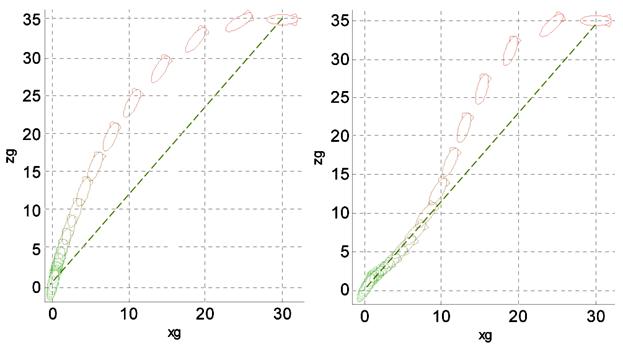
а) курс задается по направлению к точке посадки б) Техника упреждения по курсу
Рис. 3. Ориентация дирижабля на траектории при движении без ветра

Рис. 4. Ориентация дирижабля на траектории при ветре вдоль оси z
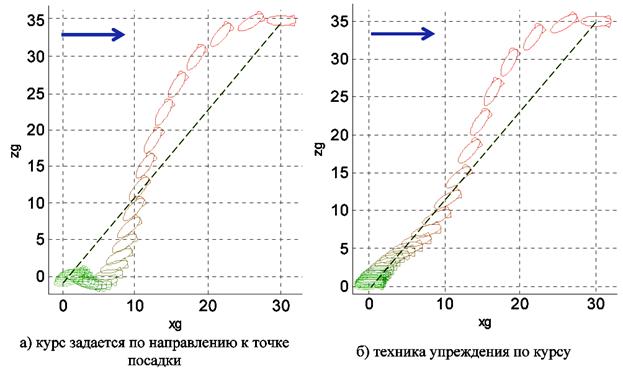
Рис. 5. Ориентация дирижабля на траектории при ветре вдоль оси x
Рисунки 6а и 6б демонстрируют эффективность применения наблюдателя для повышения точности выполнения посадки. Показано, что применение наблюдателя позволило увеличить точность выполнения задачи посадки.
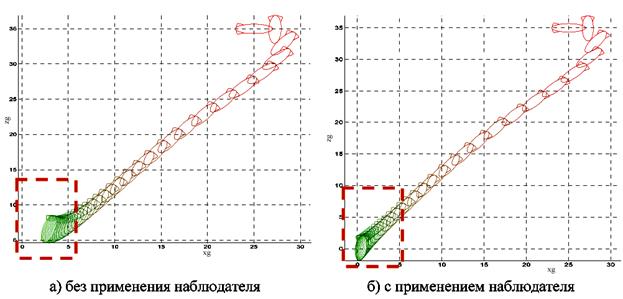
Рис. 6. Ориентация дирижабля на траектории посадки при ветре вдоль оси z с применением и без применения наблюдателя
Структура автопилота взлета и посадки дирижабля
Предложенные законы управления и представленные результаты моделирования позволяют предложить структуру автопилота, в которую входят (рис. 7):
- регулятор посадки, который обеспечивает движение дирижабля в область заданной точки посадки с точностью порядка точности навигационной системы (5-10 м),
- регулятор причаливания с модулем визуальной навигации, который обеспечивает более точное относительное позиционирование дирижабля и причальной мачты по визуальной метке;
- блок оценки внешних сил, который выполняет функции расчета и оценивания внешних сил.
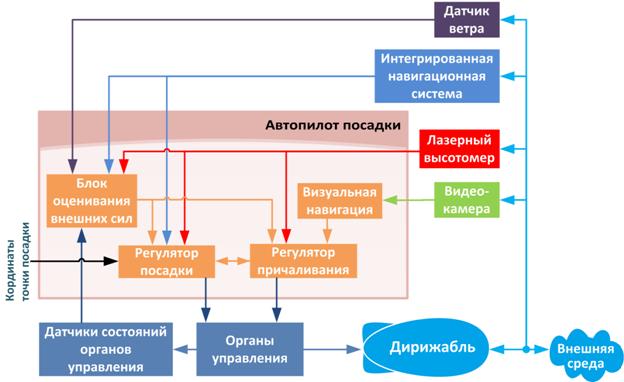
Рис. 7. Структурная схема автопилота посадки роботизированного дирижабля
Автопилот посадки использует следующие датчики и навигационные устройства:
- интегрированная навигационная система используется для определения координат и углов ориентации дирижабля в земной системе координат. В нее входят спутниковая и инерциальная навигационные системы, барометрический высотомер;
- лазерный высотомер. Если высота полета дирижабля входит в диапазон измерений лазерного высотомера, для определения высоты автопилот использует его показания вместо интегрированной навигационной системы;
- датчик скорости и направления ветра может быть опционально использован для оценки воздушной скорости и аэродинамических сил, действующих на дирижабль;
- видеокамера используется автопилотом на этапе причаливания для визуальной локальной навигации;
- датчики органов управления представляют автопилоту информацию об их текущем состоянии.
Визуальная навигация. Особенностью управления дирижаблем на этапе причаливания является необходимость относительного позиционирования дирижабля и мачты (в отличие от глобальной спутниковой навигации на этапе движения в область посадки).
Для локального позиционирования могут быть использованы радио-, ультразвуковые и инфракрасные маяки, визуальная навигация. Визуальная навигация по маркерам является наиболее дешевой и простой в развертывании. Для ее организации предлагается установить на дирижабле видеокамеру, а область посадки и причальную мачту снабдить визуальными метками (маркерами). Метка представляет собой черный квадрат с некоторым изображением (кодом) внутри (рис. 8).

Рис. 8. Визуальные маркеры
Алгоритмы поиска метки на изображении и определения относительной ориентации видеокамеры и метки хорошо проработаны и получили распространение в системах дополненной реальности [6, 7].

Рис. 9. Алгоритм работы визуальной навигации
Укрупненно, для определения взаимного положения камеры и метки необходимо выполнить следующие действия (рис. 9):
- преобразовать наблюдаемое изображение в «идеальное» в соответствии с калибровочными параметрами камеры;
- найти проекцию квадрата метки на изображении;
- определить взаимное расположение и ориентацию маркера и камеры по искривлению изображения квадрата;
- преобразовать изображение, находящееся в центре квадрата в плоское (т.е. в систему координат маркера);
- сравнить полученное изображение с эталонным, сделать вывод о правильности определения метки и о ее номере (если имеется несколько эталонных меток). Используя несколько меток с известным расположением в пространстве можно расширять область навигации.
Аппаратная реализация
На рис. 10 и 11 представлены схема аппаратной реализации автопилота и внешний вид экспериментального мини-дирижабля «Стерх» ТТИ ЮФУ.

Рис. 10. Аппаратная реализация автопилота дирижабля
Для расчета алгоритмов управления и обработки видеоизображения предлагается использовать промышленный компьютер формата PC-104 архитектуры x86. Использование универсального бортового компьютера позволяет ускорить процесс разработки и отладки системы, применять специализированные и универсальные операционные системы, библиотеки и средства разработки.
Используются интегрированная навигационная система Компанав-2 компании Текнол, лазерный высотомер Miniature Radar Altimeter компании Roke Manor Research, видеокамера Pelco SD53CBW-F-E1-X, технические характеристики которых приведены в таблице.

Рис.11. Внешний вид экспериментального мини-дирижабля «Стерх»
Интегрированная навигационная система Компанав-2 | |
Погрешность определения координат, м | 6 |
Погрешность определения скорости, м/с | 0,25 вертикальная, 0,2 путевая |
Точность определения курса | 0,4° |
Углы тангажа и крена, не более | 0.5°* |
Частота выдачи информации | 50 Гц |
Масса до, кг | 1,0 |
Лазерный высотомер Miniature Radar Altimeter | |
Диапазон измерений, м | 0,2 – 100 |
Точность, м | 0,02 |
Масса, кг | 0,4 |
Видеокамера Pelco SD53CBW-F-E1-X | |
Число элементов изображения | 724х582 |
Выходной сигнал | PAL |
Масса до, кг | 2 |
Библиографический список
1. Верба Г.Е., Голубятников В.Н., Кирилин A.Н., Пшихопов B.X., Старостин И.А., Ступников В.И. Современное состояние и перспективы использования воздухоплавательных комплексов // Мехатроника, автоматизация, управление. – 2009. ╧ 3. С. 40-42.
2. Пшихопов В.Х., Медведев М.Ю., Федоренко Р.В., Сиротенко М.Ю., Костюков В.А., Гуренко Б.В. Управление воздухоплавательными комплексами: теория и технологии проектирования. – М.: ФИЗМАТЛИТ, 2010. – 394 с.
3. Федоренко Р.В. Алгоритмы автопилота посадки роботизированного дирижабля// Электронный научно-инновационный журнал ИНЖЕНЕРНЫЙ ВЕСТНИК ДОНА.– 2011.– ╧1.– http://ivdon.ru/uploaddir/articles.371.big_image.doc
4. Пшихопов В.Х., Медведев М.Ю. Структурный синтез автопилотов подвижных объектов с оцениванием возмущений // – М.: Информационно-измерительные и управляющие системы. – 2006. – ╧1. – С.103–109.
5. Пшихопов В.Х., Медведев М.Ю. Синтез адаптивных систем управления летательными аппаратами // Известия Южного федерального университета. Технические науки. – 2010. – Т. 104. – ╧ 3. – С. 187-196.
6. ARToolkit libraries in Launchpad// https://launchpad.net/artoolkit
7. Wagner Daniel, Schmalstieg Dieter ARToolKitPlus for Pose Tracking on Mobile Devices// Proceedings of 12th Computer Vision Winter Workshop (CVWW'07).– February 2007
Публикации с ключевыми словами: робот, управление, посадка, автопилот, дирижабль
Публикации со словами: робот, управление, посадка, автопилот, дирижабль
Смотри также:
Тематические рубрики:




| Авторы |
| Пресс-релизы |
| Библиотека |
| Конференции |
| Выставки |
| О проекте |
| Телефон: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) |
|
||||
| © 2003-2024 «Наука и образование» Перепечатка материалов журнала без согласования с редакцией запрещена Тел.: +7 (915) 336-07-65 (строго: среда; пятница c 11-00 до 17-00) | |||||